You might also like
- Operations Research: Simplex MethodDocument27 pagesOperations Research: Simplex MethodFavi Ainin FitriaNo ratings yet
- Simplex Method for Solving Linear Programming ProblemsDocument10 pagesSimplex Method for Solving Linear Programming ProblemsSoha KhanNo ratings yet
- Lecture 3 The Simplex MethodDocument17 pagesLecture 3 The Simplex MethodVishruti DesaiNo ratings yet
- Simplex Method ExplainedDocument35 pagesSimplex Method ExplainedLaurenceNo ratings yet
- Optimization Lecture 2Document36 pagesOptimization Lecture 2Katie CookNo ratings yet
- Chapter 4 - Revised Simplex MethodDocument20 pagesChapter 4 - Revised Simplex MethodNguyễn Quỳnh Cẩm TúNo ratings yet
- Linear ProgrammingDocument13 pagesLinear ProgrammingSanjoy BrahmaNo ratings yet
- Linear Programming (LP) FundamentalsDocument57 pagesLinear Programming (LP) FundamentalsPratibha GoswamiNo ratings yet
- Linear ProgramDocument32 pagesLinear ProgramSoumya Bsoumya100% (1)
- Chapter_2._Constrained_Optimization[1]Document53 pagesChapter_2._Constrained_Optimization[1]ewlakachewNo ratings yet
- Note3 SimplexDocument22 pagesNote3 Simplexアユ ギタNo ratings yet
- Module - 3 Lecture Notes - 5 Revised Simplex Method, Duality and Sensitivity AnalysisDocument11 pagesModule - 3 Lecture Notes - 5 Revised Simplex Method, Duality and Sensitivity Analysismedardo77No ratings yet
- Notes On Linear Programming: CE 377K Stephen D. Boyles Spring 2015Document17 pagesNotes On Linear Programming: CE 377K Stephen D. Boyles Spring 2015SIRSHA PATTANAYAKNo ratings yet
- The Simplex Algorithm: LI Xiao-LeiDocument78 pagesThe Simplex Algorithm: LI Xiao-Leidavid__mineNo ratings yet
- The Simplex Algorithm and Goal ProgrammingDocument73 pagesThe Simplex Algorithm and Goal ProgrammingmithaNo ratings yet
- IE202 Fall2020 SS2Document5 pagesIE202 Fall2020 SS2HandeeorNo ratings yet
- Matrix Formulation of The LppsDocument13 pagesMatrix Formulation of The LppsAngad SehdevNo ratings yet
- Additional Theory For Module 4: Dynamic Analysis: Eigensolution ExampleDocument7 pagesAdditional Theory For Module 4: Dynamic Analysis: Eigensolution ExamplephysicsnewblolNo ratings yet
- Medicina OralDocument75 pagesMedicina OralPrimo SotoNo ratings yet
- Minterm Maxterm K MapDocument15 pagesMinterm Maxterm K MapDonika MarkandeNo ratings yet
- 9.3 The Simplex Method: Maximization: Standard Form of A Linear Programming ProblemDocument16 pages9.3 The Simplex Method: Maximization: Standard Form of A Linear Programming ProblemmadhavNo ratings yet
- ISM206 Optimization of Linear Programming ProblemsDocument9 pagesISM206 Optimization of Linear Programming ProblemsDaeng Delve100% (1)
- Algebraic Solution of Lpps - Simplex MethodDocument26 pagesAlgebraic Solution of Lpps - Simplex MethodAngad SehdevNo ratings yet
- Chapter - 3: Linear Programming-Graphical SolutionDocument14 pagesChapter - 3: Linear Programming-Graphical SolutionAbhinav AggarwalNo ratings yet
- SeparableDocument9 pagesSeparableshwetaNo ratings yet
- Canonical Simplex Method ExplainedDocument9 pagesCanonical Simplex Method ExplainedSoha KhanNo ratings yet
- Chapter 4. Solving Linear Programs The Simplex MethodDocument34 pagesChapter 4. Solving Linear Programs The Simplex Methodmick84No ratings yet
- ISyE6669 Homework 4 Cutting Stock & Dantzig-Wolfe ProblemsDocument2 pagesISyE6669 Homework 4 Cutting Stock & Dantzig-Wolfe ProblemsVictor NgNo ratings yet
- Lec 04 - Week 04 Operations ResearchDocument56 pagesLec 04 - Week 04 Operations Researchbnzayd2005No ratings yet
- Lecture 14 PDFDocument32 pagesLecture 14 PDFĐăng HảiNo ratings yet
- HKU MATH1853 - Brief Linear Algebra Notes: 1 Eigenvalues and EigenvectorsDocument6 pagesHKU MATH1853 - Brief Linear Algebra Notes: 1 Eigenvalues and EigenvectorsfirelumiaNo ratings yet
- Ee/Econ 458 The Simplex Method: J. MccalleyDocument36 pagesEe/Econ 458 The Simplex Method: J. Mccalleykaren dejoNo ratings yet
- Linearprog 1Document32 pagesLinearprog 1sanjay dalelaNo ratings yet
- 5 Solutions of Linear ProgramsDocument4 pages5 Solutions of Linear ProgramsHillal TOUATINo ratings yet
- Lyapunov Stability Theory:: Problem of Motion Stability, Includes Two Methods For Stability Analysis (The SoDocument25 pagesLyapunov Stability Theory:: Problem of Motion Stability, Includes Two Methods For Stability Analysis (The SoSantiago Garrido BullónNo ratings yet
- Econometrics (EM2008) The K-Variable Linear Regression ModelDocument46 pagesEconometrics (EM2008) The K-Variable Linear Regression ModelSelMarie Nutelliina GomezNo ratings yet
- Exam 1 RevDocument4 pagesExam 1 Revmexefon390No ratings yet
- MTH 242-Differential Equations: Lecture LayoutDocument11 pagesMTH 242-Differential Equations: Lecture LayoutKiran RashidNo ratings yet
- LP Simplex 2Document25 pagesLP Simplex 2karen dejoNo ratings yet
- 2 - Introduction Formulation and Geometry of LPPDocument21 pages2 - Introduction Formulation and Geometry of LPPSanskar RanaNo ratings yet
- MGTSC Ch2 Geom AlgDocument13 pagesMGTSC Ch2 Geom Algwa islamahNo ratings yet
- Big MDocument10 pagesBig MSutapa DeNo ratings yet
- Multiple Optimal SolutionsDocument2 pagesMultiple Optimal SolutionsEmmeline BlairNo ratings yet
- Inverse of MatrixDocument10 pagesInverse of Matrixdx19729510No ratings yet
- Lecture 2 (Introduction To LPP)Document29 pagesLecture 2 (Introduction To LPP)Shipra NarauneyNo ratings yet
- The Simplex Algorithm: An IntroductionDocument25 pagesThe Simplex Algorithm: An IntroductionmritroyNo ratings yet
- Standard Form of A Linear Programming ProblemDocument16 pagesStandard Form of A Linear Programming ProblemSalih AkadarNo ratings yet
- Lecture 6: Properties and Applications of Singular ValuesDocument8 pagesLecture 6: Properties and Applications of Singular ValuesMayur BhiseNo ratings yet
- Linear optimization methods and extensionsDocument81 pagesLinear optimization methods and extensionsBassem KhalidNo ratings yet
- Chapter 02 - Simplex Method IntroductionDocument14 pagesChapter 02 - Simplex Method IntroductionAfaq AhmedNo ratings yet
- Simple Lin Regress InferenceDocument51 pagesSimple Lin Regress InferenceSANYOG THAKRENo ratings yet
- OR Unit-1 With MCQ PDFDocument263 pagesOR Unit-1 With MCQ PDFMansi Patel100% (1)
- 3.2 - Interpolation and Lagrange Polynomials 1. Polynomial Interpolation: Problem: Given NDocument13 pages3.2 - Interpolation and Lagrange Polynomials 1. Polynomial Interpolation: Problem: Given NBashar BaniataNo ratings yet
- Quantitative Methods Lecture 4Document22 pagesQuantitative Methods Lecture 4Osman Abdul-MuminNo ratings yet
- Simplex Method: Theory at A Glance (For IES, GATE, PSU) General Linear Programming ProblemDocument12 pagesSimplex Method: Theory at A Glance (For IES, GATE, PSU) General Linear Programming Problemganesh gowthamNo ratings yet
- Constrained OptimisationDocument8 pagesConstrained OptimisationhishamsaukNo ratings yet
- New Abyssinia CollegeDocument14 pagesNew Abyssinia CollegeE talkNo ratings yet
- Chapter Three Systems of Linear Equations: Dr. Asma AlramleDocument12 pagesChapter Three Systems of Linear Equations: Dr. Asma AlramleRetaj LibyaNo ratings yet
- Graphical Method and Simplex MethodDocument61 pagesGraphical Method and Simplex MethodKaushik Reddy100% (1)
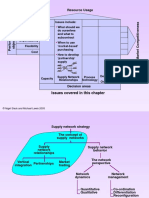
- Resource Usage: Issues Covered in This ChapterDocument21 pagesResource Usage: Issues Covered in This ChapterYusuf HusseinNo ratings yet
- Statistics and Research MethodsDocument5 pagesStatistics and Research MethodsYusuf HusseinNo ratings yet
- Except The: Income Sharing RatioDocument1 pageExcept The: Income Sharing RatioYusuf HusseinNo ratings yet
- Final Exam Research Methods ANTH 410/510Document7 pagesFinal Exam Research Methods ANTH 410/510Yusuf HusseinNo ratings yet
- Ch02 LeadershipDocument60 pagesCh02 LeadershipYusuf HusseinNo ratings yet
- Acc 255 Final Exam Review Packet (New Material)Document6 pagesAcc 255 Final Exam Review Packet (New Material)Tajalli FatimaNo ratings yet
- Linear Regression Is An Important Concept in Finance and Practically All Forms of ResearchDocument10 pagesLinear Regression Is An Important Concept in Finance and Practically All Forms of ResearchYusuf HusseinNo ratings yet
- Lesson ThreeDocument14 pagesLesson ThreeYusuf HusseinNo ratings yet
- Exam 2 Sample SolutionDocument6 pagesExam 2 Sample SolutionYusuf HusseinNo ratings yet
- Abdc Journal Quality List 2013Document32 pagesAbdc Journal Quality List 2013PratikJainNo ratings yet
- RSH - Qam11 - Excel and Excel QM Explsm2010Document153 pagesRSH - Qam11 - Excel and Excel QM Explsm2010Yusuf HusseinNo ratings yet
- QuizzDocument1 pageQuizzYusuf HusseinNo ratings yet
- Lec 1 - Introduction To Wireless CommunicationDocument60 pagesLec 1 - Introduction To Wireless CommunicationYusuf HusseinNo ratings yet
- Format of The ResearchDocument2 pagesFormat of The ResearchYusuf HusseinNo ratings yet
- Example DVDDocument17 pagesExample DVDYusuf HusseinNo ratings yet
- Yaaqshiid: 1 Xaafadaha, Laamaha Iyo Waax-AhaDocument4 pagesYaaqshiid: 1 Xaafadaha, Laamaha Iyo Waax-AhaYusuf HusseinNo ratings yet
- BankingDocument20 pagesBankingYusuf HusseinNo ratings yet
- Test OneDocument8 pagesTest OneYusuf HusseinNo ratings yet
- Chapter EightDocument11 pagesChapter EightYusuf HusseinNo ratings yet
- Data and Process Modeling: Husein OsmanDocument17 pagesData and Process Modeling: Husein OsmanYusuf HusseinNo ratings yet
- Chapter Four: Entering Beginning BalancesDocument4 pagesChapter Four: Entering Beginning BalancesYusuf HusseinNo ratings yet
- Accounting for Islamic Banks: Mudharabah FinancingDocument32 pagesAccounting for Islamic Banks: Mudharabah FinancingYusuf Hussein40% (5)
- Chapter 1Document29 pagesChapter 1Yusuf Hussein100% (2)
- Key Concepts: Week 5 Lesson 3: Economic Order Quantity (EOQ) ExtensionsDocument5 pagesKey Concepts: Week 5 Lesson 3: Economic Order Quantity (EOQ) ExtensionsYusuf HusseinNo ratings yet
- Simplex Method Solves Linear Programming ProblemsDocument34 pagesSimplex Method Solves Linear Programming ProblemsYusuf HusseinNo ratings yet
- Capital BudgetDocument124 pagesCapital BudgetYusuf HusseinNo ratings yet
- Ackoff's Management Misinformation SystemsDocument5 pagesAckoff's Management Misinformation SystemsAnna KarousiotiNo ratings yet
- 6 - 2 - Lectures NotesDocument103 pages6 - 2 - Lectures NotesYusuf HusseinNo ratings yet
- Mcom Ac Paper IIDocument282 pagesMcom Ac Paper IIAmar Kant Pandey100% (1)
- Islamic Banking Ideal N RealityDocument19 pagesIslamic Banking Ideal N RealityIbnu TaimiyyahNo ratings yet
- GQFTDocument12 pagesGQFTcamilo jimenezNo ratings yet
- ROBOT DESIGN AND DEVELOPMENT FUNDAMENTALSDocument24 pagesROBOT DESIGN AND DEVELOPMENT FUNDAMENTALSjoseeliasNo ratings yet
- Lie Groups and Lie Algebras NotesDocument150 pagesLie Groups and Lie Algebras NotesAlejandro GastonNo ratings yet
- 2009 - Tonkin - Calibration Constrained Monte Carlo Analysis of Highly Parameterized ModelsDocument17 pages2009 - Tonkin - Calibration Constrained Monte Carlo Analysis of Highly Parameterized ModelsedwarzambranoNo ratings yet
- What Is A Linear Equation?: 1 1 2 2 n-1 n-1 N N I I IDocument3 pagesWhat Is A Linear Equation?: 1 1 2 2 n-1 n-1 N N I I IsdfdsfNo ratings yet
- Kendriya vidyalaya Tiruvannamalai Class 12 Maths Practice test 1 Section ADocument5 pagesKendriya vidyalaya Tiruvannamalai Class 12 Maths Practice test 1 Section AraghavNo ratings yet
- Clifford AlgebraDocument22 pagesClifford AlgebraChandra Prakash100% (1)
- Stayman IEEE Trans Med Imaging 19 (6) 2000 - Regularization For Uniform Spatial Resolution Properties in Penalized-Likelihood Image ReconstructionDocument15 pagesStayman IEEE Trans Med Imaging 19 (6) 2000 - Regularization For Uniform Spatial Resolution Properties in Penalized-Likelihood Image ReconstructionDavid SarrutNo ratings yet
- Example 21.3 Stiffness Method Beam 5 NodesDocument15 pagesExample 21.3 Stiffness Method Beam 5 NodesSarah HaiderNo ratings yet
- History of GeometryDocument14 pagesHistory of GeometryKeppy AricangoyNo ratings yet
- Sarhad University Distance Education Multivariable Calculus Final Exam PaperDocument1 pageSarhad University Distance Education Multivariable Calculus Final Exam PaperFaisal HayatNo ratings yet
- Math 240: Inverses: Ryan BlairDocument19 pagesMath 240: Inverses: Ryan Blairjuncos0729No ratings yet
- Assignment 4Document6 pagesAssignment 4Fulsoundar ParthNo ratings yet
- Math 55a Homework 5 Ker Dimensions and Nilpotent MapsDocument2 pagesMath 55a Homework 5 Ker Dimensions and Nilpotent MapsYelsin Leonel Cáceres GómezNo ratings yet
- Doolittle AlgorithmDocument6 pagesDoolittle AlgorithmMatthew HolmesNo ratings yet
- Determinants of Matrices of Higher OrderDocument6 pagesDeterminants of Matrices of Higher OrderAbyakta BaurahNo ratings yet
- The Laplacian Operator in Spherical Polar CoordinatesDocument3 pagesThe Laplacian Operator in Spherical Polar CoordinatesTristanPilNo ratings yet
- BSC Maths - UG Full Syllabus 2011 - Madras UniversityDocument29 pagesBSC Maths - UG Full Syllabus 2011 - Madras UniversityShurender Sekar100% (2)
- Transforming GraphicsDocument51 pagesTransforming GraphicsAjay GhugeNo ratings yet
- Module 1d More On The Augmented MatricesDocument9 pagesModule 1d More On The Augmented MatricesESTEBAN , BETHEL A.No ratings yet
- Tut 3 On Vector Differential CalculusDocument4 pagesTut 3 On Vector Differential CalculusRohan ZendeNo ratings yet
- 10th ICSE MATHS MATRICESDocument21 pages10th ICSE MATHS MATRICESSANDEEP SINGHNo ratings yet
- Dyadics IdentitiesDocument22 pagesDyadics IdentitiesManu SwarnkarNo ratings yet
- Matrices NotesDocument13 pagesMatrices Notesps3266_753186479No ratings yet
- Algebra 2: Section 4.2Document13 pagesAlgebra 2: Section 4.2api-16254560No ratings yet
- Practice Exam Linear Algebra PDFDocument2 pagesPractice Exam Linear Algebra PDFShela RamosNo ratings yet
- Instructor's Answer Book: Mathematical Methods in The Physical Sciences, 3rd EditionDocument73 pagesInstructor's Answer Book: Mathematical Methods in The Physical Sciences, 3rd EditionHelda PazanaNo ratings yet
- DIRECT STIFFNESS METHODDocument7 pagesDIRECT STIFFNESS METHODmiry89No ratings yet
- Lecture 15 - The Lie Group SL (2, C) and Its Lie Algebra SL (2, C) (Schuller's Geometric Anatomy of Theoretical Physics)Document10 pagesLecture 15 - The Lie Group SL (2, C) and Its Lie Algebra SL (2, C) (Schuller's Geometric Anatomy of Theoretical Physics)Simon ReaNo ratings yet
- Simplex Made EasyDocument7 pagesSimplex Made EasyruksaarNo ratings yet
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipFrom EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipRating: 4.5 out of 5 stars4.5/5 (1135)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisFrom EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (22)
- Learn Spanish While SleepingFrom EverandLearn Spanish While SleepingRating: 4 out of 5 stars4/5 (20)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageFrom EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageRating: 5 out of 5 stars5/5 (72)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingFrom EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingRating: 4.5 out of 5 stars4.5/5 (149)
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingFrom EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingRating: 4.5 out of 5 stars4.5/5 (495)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisFrom EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisRating: 5 out of 5 stars5/5 (3)
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerFrom EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerRating: 4.5 out of 5 stars4.5/5 (56)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningFrom EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningRating: 4.5 out of 5 stars4.5/5 (55)
- Functional Training and Beyond: Building the Ultimate Superfunctional Body and MindFrom EverandFunctional Training and Beyond: Building the Ultimate Superfunctional Body and MindRating: 4.5 out of 5 stars4.5/5 (1)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisFrom EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (2)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisFrom EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisRating: 4 out of 5 stars4/5 (6)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4.5 out of 5 stars4.5/5 (1872)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisFrom EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (30)
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisFrom EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisRating: 5 out of 5 stars5/5 (15)
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveFrom EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveRating: 5 out of 5 stars5/5 (1)
- Summary of The Power of Habit: Why We Do What We Do in Life and Business by Charles DuhiggFrom EverandSummary of The Power of Habit: Why We Do What We Do in Life and Business by Charles DuhiggRating: 4.5 out of 5 stars4.5/5 (261)
- Learn French: The Essentials You Need to Go From an Absolute Beginner to Intermediate and AdvancedFrom EverandLearn French: The Essentials You Need to Go From an Absolute Beginner to Intermediate and AdvancedNo ratings yet
- The Inequality Machine: How College Divides UsFrom EverandThe Inequality Machine: How College Divides UsRating: 4.5 out of 5 stars4.5/5 (17)
- Whatever It Takes: Geoffrey Canada's Quest to Change Harlem and AmericaFrom EverandWhatever It Takes: Geoffrey Canada's Quest to Change Harlem and AmericaRating: 4 out of 5 stars4/5 (79)
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveFrom EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveRating: 4 out of 5 stars4/5 (25)
- Follow The Leader: A Collection Of The Best Lectures On LeadershipFrom EverandFollow The Leader: A Collection Of The Best Lectures On LeadershipRating: 5 out of 5 stars5/5 (122)
- You Are Not Special: And Other EncouragementsFrom EverandYou Are Not Special: And Other EncouragementsRating: 4.5 out of 5 stars4.5/5 (6)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingFrom EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingRating: 4 out of 5 stars4/5 (59)










![Chapter_2._Constrained_Optimization[1]](https://imgv2-1-f.scribdassets.com/img/document/720785175/149x198/8866332cfe/1712475288?v=1)