You might also like
- Wave 50 Series PDFDocument268 pagesWave 50 Series PDFSantiago UrreaNo ratings yet
- MOSFET DC Ids-Vds Characteristic Curve and Spice Extraction of Small Signal Model ParametersDocument22 pagesMOSFET DC Ids-Vds Characteristic Curve and Spice Extraction of Small Signal Model ParametersRobert Tac-an Nericua100% (2)
- (Oncologysurgery) Graeme J Poston, Michael DAngelica, Rene ADAM - Surgical Management of Hepatobiliary and Pancreatic Di 1Document630 pages(Oncologysurgery) Graeme J Poston, Michael DAngelica, Rene ADAM - Surgical Management of Hepatobiliary and Pancreatic Di 1Marlene MartínezNo ratings yet
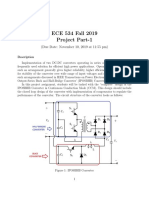
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- Juwi Global PresentationDocument46 pagesJuwi Global PresentationMochamad BhadawiNo ratings yet
- Flyback ConverterDocument19 pagesFlyback Convertergpalencia_1No ratings yet
- Spice BasicsDocument14 pagesSpice BasicsLokendra Singh ShekhawatNo ratings yet
- Experiment 4, Part 1Document7 pagesExperiment 4, Part 1ollata kalanoNo ratings yet
- K0518Document36 pagesK0518tyutyuNo ratings yet
- Spice Models For Power ElectronicsDocument13 pagesSpice Models For Power ElectronicslaksologinNo ratings yet
- DatasheetDocument36 pagesDatasheetErick EmersonNo ratings yet
- Evaluation of Modern MOSFET Models For Bulk-Driven ApplicationsDocument4 pagesEvaluation of Modern MOSFET Models For Bulk-Driven Applications1zxcNo ratings yet
- Vlsi Lab ManualDocument27 pagesVlsi Lab ManualSandeep V GowdaNo ratings yet
- A Virtual Analog Computer For Your DesktopDocument7 pagesA Virtual Analog Computer For Your DesktoposcarNo ratings yet
- Pspice TutorialDocument21 pagesPspice TutorialPrince Pandey100% (1)
- Lab - Experiment - 1-3Document11 pagesLab - Experiment - 1-3Md. Sadique SheikhNo ratings yet
- Cad For Electronics Lab Kec-653Document59 pagesCad For Electronics Lab Kec-653Aviral VarshneyNo ratings yet
- Eee102 Ex4 PSPICEDocument7 pagesEee102 Ex4 PSPICErajibkhanprinceNo ratings yet
- EEE 5321 Sp24 HW1 Ver2 020524Document4 pagesEEE 5321 Sp24 HW1 Ver2 020524Towsif Muhtadi KhanNo ratings yet
- EE3408E Project Design A Two-Stage Operational AmplifierDocument4 pagesEE3408E Project Design A Two-Stage Operational AmplifierLaSo ASNo ratings yet
- Lab1 Tranzistoare EngDocument11 pagesLab1 Tranzistoare Engtoufik bendibNo ratings yet
- Ansoft Designer Harmonic BalanceDocument9 pagesAnsoft Designer Harmonic BalanceAbdul Kadir Ramos FaisalNo ratings yet
- MAX5072/3 Switching Power Supply Clock ConfigurationDocument13 pagesMAX5072/3 Switching Power Supply Clock ConfigurationJc Jayamanikandan BNo ratings yet
- Current Source With Floating Load (OP AMP)Document5 pagesCurrent Source With Floating Load (OP AMP)mavel89No ratings yet
- BJT Design Build TestDocument12 pagesBJT Design Build TestdominggoNo ratings yet
- Pspice MosfetsDocument6 pagesPspice Mosfetsbhaskar1210510101No ratings yet
- Application of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemDocument5 pagesApplication of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemRaghava KatreepalliNo ratings yet
- Inversor Trifasico en MatlabDocument6 pagesInversor Trifasico en MatlabAngel Arturo Castellanos SantamariaNo ratings yet
- Short Tutorial On PSpiceDocument14 pagesShort Tutorial On PSpiceHuỳnh Thanh DưNo ratings yet
- BJT Ebers-Moll Model and SPICE MOSFET ModelDocument40 pagesBJT Ebers-Moll Model and SPICE MOSFET ModelDragana MladjenovicNo ratings yet
- Question Bank Fundamentals of CMOS VLSI-10EC56 15-16Document10 pagesQuestion Bank Fundamentals of CMOS VLSI-10EC56 15-16Pranav KpNo ratings yet
- Ec 262 Pspice ManualDocument69 pagesEc 262 Pspice ManualRama KrishnaNo ratings yet
- EE240 Proj2Document2 pagesEE240 Proj2SaliiKiruosiNo ratings yet
- Electrical Simulation Lab: EEE 454 IV Sem EN BranchDocument28 pagesElectrical Simulation Lab: EEE 454 IV Sem EN Branchsachin10dulkarNo ratings yet
- Eldo TutorialDocument9 pagesEldo TutorialSaurabh ChakravartyNo ratings yet
- Vlsi Lab1 F 13 v3 SentDocument27 pagesVlsi Lab1 F 13 v3 SentAnonymous 0yEAbwuNo ratings yet
- 1 Generic SPICE: Introduction To Circuit Simulation For 6.012Document7 pages1 Generic SPICE: Introduction To Circuit Simulation For 6.012Larry Gerard AquinoNo ratings yet
- Introduction To Pspice: Creating A Circuit Description FileDocument2 pagesIntroduction To Pspice: Creating A Circuit Description FileskrtamilNo ratings yet
- Winspice - Tutorial 2Document20 pagesWinspice - Tutorial 2Ifrah LiaqatNo ratings yet
- Pspice TutDocument20 pagesPspice TutPratyush ChauhanNo ratings yet
- Experiment No. 1: Aim: Study of Tanner Tools THEORY: Tanner ToolsDocument24 pagesExperiment No. 1: Aim: Study of Tanner Tools THEORY: Tanner ToolsVarun GargNo ratings yet
- AbmDocument18 pagesAbmchmscemNo ratings yet
- An 4137Document20 pagesAn 4137Andres RinconNo ratings yet
- LT SpiceDocument6 pagesLT SpiceVijay Preetham100% (1)
- ESE 570 Cadence Lab Assignment 2: Introduction To Spectre, Manual Layout Drawing and Post Layout Simulation (PLS)Document7 pagesESE 570 Cadence Lab Assignment 2: Introduction To Spectre, Manual Layout Drawing and Post Layout Simulation (PLS)Parul TrivediNo ratings yet
- Classc Sim PDFDocument6 pagesClassc Sim PDFmastelecentroNo ratings yet
- Sepic Converter Design and Operation: by Gregory SharpDocument21 pagesSepic Converter Design and Operation: by Gregory SharpSingam SridharNo ratings yet
- I. Instructional Objectives: D S G D GDocument4 pagesI. Instructional Objectives: D S G D Gcokelat_kNo ratings yet
- Homework #3 Buck Converter - Voltage Mode ControlDocument3 pagesHomework #3 Buck Converter - Voltage Mode Controlomar nasserNo ratings yet
- Vlsi - Ec - Be - Sem 5Document2 pagesVlsi - Ec - Be - Sem 5KrishnaNo ratings yet
- CND101 Lab 7Document24 pagesCND101 Lab 7Mostafa KhaledNo ratings yet
- l24 PDFDocument27 pagesl24 PDFAshok KumarNo ratings yet
- Ecd Lab 4 UsmanDocument8 pagesEcd Lab 4 UsmanUsman jadoonNo ratings yet
- Challenges of MOS Analog Circuit Simulation With SPICEDocument5 pagesChallenges of MOS Analog Circuit Simulation With SPICEVinodNo ratings yet
- Devendra Singh Kushwaha: Topic-A Novel Approach To Designing of Low Power Operational AmplifierDocument31 pagesDevendra Singh Kushwaha: Topic-A Novel Approach To Designing of Low Power Operational AmplifierHarish KumarNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Advanced Multilevel Converters and Applications in Grid IntegrationFrom EverandAdvanced Multilevel Converters and Applications in Grid IntegrationAli Iftekhar MaswoodNo ratings yet
- 01 Skill IntroductionDocument16 pages01 Skill IntroductionsureshchattuNo ratings yet
- How To Predict Stability in Linear RegulatorsDocument7 pagesHow To Predict Stability in Linear RegulatorssureshchattuNo ratings yet
- Lecture 19Document15 pagesLecture 19sureshchattuNo ratings yet
- Corner Lot PDFDocument35 pagesCorner Lot PDFsureshchattuNo ratings yet
- Resume OldDocument2 pagesResume OldsureshchattuNo ratings yet
- Harish ResumeDocument6 pagesHarish ResumesureshchattuNo ratings yet
- Chapter 1 - Nutrition and Diet TherapyDocument59 pagesChapter 1 - Nutrition and Diet TherapySami Ingles100% (1)
- Hydra FacialDocument46 pagesHydra FacialRatu Lucky Baskara PutriNo ratings yet
- Gravitational Force WS NO ANSDocument4 pagesGravitational Force WS NO ANSNajmah Sirad AmpaNo ratings yet
- Presentation On Industrial Attachment at Bangladesh BetarDocument17 pagesPresentation On Industrial Attachment at Bangladesh BetarShafin Al Asad Protic100% (1)
- Puddle Flange Thickness Sheet-P2m-R0Document1 pagePuddle Flange Thickness Sheet-P2m-R0Faisal MumtazNo ratings yet
- Unit 3 Part CDocument4 pagesUnit 3 Part CGopal KhatuaNo ratings yet
- EsophagusDocument9 pagesEsophagusapi-329968843No ratings yet
- Organic Mental Disorders Due To Brain DiseasesDocument45 pagesOrganic Mental Disorders Due To Brain DiseasesMEDS easyNo ratings yet
- Conservation of Plants and AnimalsDocument36 pagesConservation of Plants and AnimalsAngeelina AgarwalNo ratings yet
- LESSON PLAN (1st Quarter) - Nursery 2Document30 pagesLESSON PLAN (1st Quarter) - Nursery 2acayetcadayNo ratings yet
- Fuels and CombustionsDocument7 pagesFuels and CombustionsRica ArellagaNo ratings yet
- LabReport L14 Mrs - RAJESHWARI60YRS F 06 04 202420240406 2 E38fgDocument3 pagesLabReport L14 Mrs - RAJESHWARI60YRS F 06 04 202420240406 2 E38fgAnkit GairolaNo ratings yet
- Evriel Bladesinger (Level 3 - Aasimar - Paladin (Oath of Redemption)Document5 pagesEvriel Bladesinger (Level 3 - Aasimar - Paladin (Oath of Redemption)Gabriel Edward LumiwanNo ratings yet
- Type of ControllerDocument2 pagesType of ControllerDivyashini MohanNo ratings yet
- P 900 Ed 19 19 - 17 4876 PDFDocument32 pagesP 900 Ed 19 19 - 17 4876 PDFnanang trihatnoNo ratings yet
- Eil Spec For Pmi PDFDocument8 pagesEil Spec For Pmi PDFsonnu151No ratings yet
- Tiger: Reinforcement Worksheet 1Document1 pageTiger: Reinforcement Worksheet 1albaNo ratings yet
- 28 PDFDocument6 pages28 PDFS S Reddy SomuNo ratings yet
- An Analysis of The Marketing Activities of Geo Steel LimiteddDocument55 pagesAn Analysis of The Marketing Activities of Geo Steel Limiteddsajjad0% (1)
- Grand Teton: Bird Finding GuideDocument2 pagesGrand Teton: Bird Finding Guideblue wolfNo ratings yet
- Hipernatremia Dan Penatalaksanaanya: Yuswanto SetyawanDocument7 pagesHipernatremia Dan Penatalaksanaanya: Yuswanto SetyawanlalaNo ratings yet
- Complexity, Cognition, Urban Planning and Design: Juval Portugali Egbert Stolk EditorsDocument331 pagesComplexity, Cognition, Urban Planning and Design: Juval Portugali Egbert Stolk EditorsOmega ZeroNo ratings yet
- Mindray 1561Document2 pagesMindray 1561ShahinNo ratings yet
- Hepatoprotective Activity of Siddha Medicinal IndigoferaDocument4 pagesHepatoprotective Activity of Siddha Medicinal IndigoferaugoNo ratings yet
- PPSAS Chart of AccountsDocument16 pagesPPSAS Chart of Accountsleyn sanburgNo ratings yet
- Turbo Expander CompressorDocument8 pagesTurbo Expander CompressorSaidFerdjallahNo ratings yet
- Electric Charges and Fields: Chapter OneDocument50 pagesElectric Charges and Fields: Chapter OnerockstarNo ratings yet