You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Stainless SteelDocument7 pagesStainless SteelcasaeanNo ratings yet
- The I-Configure InterfaceDocument51 pagesThe I-Configure Interfacecasaean100% (1)
- Experience Physics Skills Workbook PDFDocument211 pagesExperience Physics Skills Workbook PDFmemi memi100% (2)
- Hydraulic Modeling With EPA-NETDocument27 pagesHydraulic Modeling With EPA-NETcasaeanNo ratings yet
- I V Savelyev Physics General Course Vol 1Document439 pagesI V Savelyev Physics General Course Vol 1GianniNicheliNo ratings yet
- Importance & Impact of Stress Intensification Factor (SIF) : A PresentationDocument8 pagesImportance & Impact of Stress Intensification Factor (SIF) : A Presentationcasaean100% (1)
- Criterios Pipe Supports - 2Document10 pagesCriterios Pipe Supports - 2casaeanNo ratings yet
- Tutorial IsogenDocument18 pagesTutorial IsogencasaeanNo ratings yet
- Median Ranks Calculation For Fractional FailuresDocument5 pagesMedian Ranks Calculation For Fractional FailurescasaeanNo ratings yet
- Median Rank Based On Mean Order NumberDocument5 pagesMedian Rank Based On Mean Order NumbercasaeanNo ratings yet
- Xplore Orld Iping: Definition and Details of Flanges Flange FacesDocument5 pagesXplore Orld Iping: Definition and Details of Flanges Flange FacescasaeanNo ratings yet
- Calculating The Parameters of The Weibull DistributionDocument6 pagesCalculating The Parameters of The Weibull DistributioncasaeanNo ratings yet
- Me Sci 8 q1 0201 SGDocument20 pagesMe Sci 8 q1 0201 SGZyro Jay MonteroNo ratings yet
- Ideal Science Academy: 1) PhysicalDocument92 pagesIdeal Science Academy: 1) PhysicalSidra UsmanNo ratings yet
- Science Module 4Document5 pagesScience Module 4Bea RosalesNo ratings yet
- ENS 231 Statics of Rigid Bodies Chapter 1 2Document55 pagesENS 231 Statics of Rigid Bodies Chapter 1 2Lyn RoswellNo ratings yet
- Lesson Plan I. Objectives: at The End of The Lesson, Students Will Be Able ToDocument2 pagesLesson Plan I. Objectives: at The End of The Lesson, Students Will Be Able ToAlyssa GurangoNo ratings yet
- Straw Waves and Energy TransferDocument3 pagesStraw Waves and Energy TransferZola LemmaNo ratings yet
- Class XDocument5 pagesClass Xvivek latpateNo ratings yet
- Forces Motion and Energy Teacher NotesDocument73 pagesForces Motion and Energy Teacher NotesBlob BlobbyNo ratings yet
- Physics Inertial Balance Inquiry LabDocument5 pagesPhysics Inertial Balance Inquiry LabVeronica LinNo ratings yet
- EnrichmentDocument2 pagesEnrichmentChristine Joy Togonon AguilarNo ratings yet
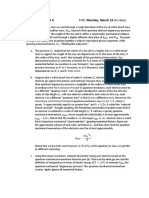
- PHYS 175 - Problem Set 4Document9 pagesPHYS 175 - Problem Set 4Anonymous ozcu2wNo ratings yet
- ME Final Syllabus SemesterVersDocument225 pagesME Final Syllabus SemesterVersRavidu LakshanNo ratings yet
- GRADES 1 To 12Document71 pagesGRADES 1 To 12Orlando Hepulan BandolesNo ratings yet
- Sheet - 01 - Laws of MotionDocument107 pagesSheet - 01 - Laws of MotionLakshya Pratap SinghNo ratings yet
- Variable Mass 6 Dof MotionDocument4 pagesVariable Mass 6 Dof Motionmohammadrezamadadi100% (1)
- Biomechanics in DanceDocument2 pagesBiomechanics in DanceLily SweatmanNo ratings yet
- Matriculation Physic Definition List SEM 1Document4 pagesMatriculation Physic Definition List SEM 1Carl WongNo ratings yet
- AP Physics: Newton's LawsDocument7 pagesAP Physics: Newton's Lawsnanio_7No ratings yet
- Power Point Fizik Form 4Document26 pagesPower Point Fizik Form 4Sasmuhd HamzahNo ratings yet
- Introduction To Physics: 1.1 PendulumDocument68 pagesIntroduction To Physics: 1.1 Pendulumfahmi100% (1)
- Momentum and Conservation of EnergyDocument7 pagesMomentum and Conservation of EnergyPamela MarieNo ratings yet
- Test Bank For Essentials of Radiographic Physics and Imaging 3rd Edition James JohnstonDocument16 pagesTest Bank For Essentials of Radiographic Physics and Imaging 3rd Edition James Johnstonpearloanhrl4iNo ratings yet
- Law of Inertia - Performance Task #1Document2 pagesLaw of Inertia - Performance Task #1marsh melloNo ratings yet
- Statics IntroDocument47 pagesStatics IntroclainieNo ratings yet
- Slides Sinamics DCC-LTC v1 0 1Document19 pagesSlides Sinamics DCC-LTC v1 0 1abirajeshNo ratings yet
- CH3 MergerDocument45 pagesCH3 MergerRuthNo ratings yet
- Part 2 Questions OnlyDocument42 pagesPart 2 Questions Onlyarmando licanda BSE Math 2ANo ratings yet