You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hartleys - James Bay Resource Upgrade Positive For ValuationDocument6 pagesHartleys - James Bay Resource Upgrade Positive For ValuationAydın GöğüşNo ratings yet
- AAL PresentationDocument25 pagesAAL PresentationAydın GöğüşNo ratings yet
- Common Pitfalls in Hydraulic Design of Large Diameter PipelinesDocument11 pagesCommon Pitfalls in Hydraulic Design of Large Diameter PipelinesAydın GöğüşNo ratings yet
- Baillieu - Hitting Targets EarlierDocument4 pagesBaillieu - Hitting Targets EarlierAydın GöğüşNo ratings yet
- Cannocord ReportDocument76 pagesCannocord ReportAydın Göğüş100% (1)
- Closer Look CE-Practice V.t.chuDocument88 pagesCloser Look CE-Practice V.t.chubasem_eng77No ratings yet
- Caihe ch1Document30 pagesCaihe ch1dwaraganathan100% (1)
- Comb Ride Sign Manual Part IDocument294 pagesComb Ride Sign Manual Part IJan GnatNo ratings yet
- SC27 WaterDocument37 pagesSC27 WaterAydın GöğüşNo ratings yet
- Sc27 Civil ProtectionDocument19 pagesSc27 Civil ProtectionAydın GöğüşNo ratings yet
- Beam ManualDocument30 pagesBeam ManualAydın Göğüş100% (1)
- SC27 HorizontalDocument24 pagesSC27 HorizontalAydın GöğüşNo ratings yet
- Closer Look CE-Practice V.t.chuDocument88 pagesCloser Look CE-Practice V.t.chubasem_eng77No ratings yet
- Comb Ride Sign Manual Part I IDocument134 pagesComb Ride Sign Manual Part I IAydın GöğüşNo ratings yet
- CE 382 L11 - Force MethodDocument44 pagesCE 382 L11 - Force MethodAydın GöğüşNo ratings yet
- Kirsal KalkinmaDocument115 pagesKirsal KalkinmaAydın GöğüşNo ratings yet
- Alkaya Et AlDocument9 pagesAlkaya Et AlAydın GöğüşNo ratings yet
- CE 382 L10 - Approximate AnalysisDocument32 pagesCE 382 L10 - Approximate AnalysisAydın GöğüşNo ratings yet
- CE 382 L9 - Intro To Indeterminate AnalysisDocument60 pagesCE 382 L9 - Intro To Indeterminate AnalysisAydın GöğüşNo ratings yet
- Geotechnical Site Investigations For Underground Projects2Document249 pagesGeotechnical Site Investigations For Underground Projects2Aydın GöğüşNo ratings yet
- CE 382 L8 - Influence Line DiagramsDocument56 pagesCE 382 L8 - Influence Line DiagramsAydın GöğüşNo ratings yet
- CE 382 L6 - Shear and Moment DiagramsDocument42 pagesCE 382 L6 - Shear and Moment DiagramsAydın Göğüş100% (2)
- CE 382 L4 - Support ReactionsDocument35 pagesCE 382 L4 - Support ReactionsAydın GöğüşNo ratings yet
- CE 382 L2 - LoadsDocument30 pagesCE 382 L2 - LoadsAydın GöğüşNo ratings yet
- Tributary Areas IIDocument16 pagesTributary Areas IIsea_jazzNo ratings yet
- CE 382 L1 - IntroDocument18 pagesCE 382 L1 - IntroAydın GöğüşNo ratings yet
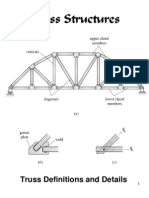
- CE 382 L5 - Truss Structures Engineering MechanicsDocument37 pagesCE 382 L5 - Truss Structures Engineering MechanicsAnnaIzzatNo ratings yet
- CE 382 L12 - Plastic AnalysisDocument35 pagesCE 382 L12 - Plastic AnalysisAydın Göğüş100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- IQ 250/260 Transducer Quick Start GuideDocument2 pagesIQ 250/260 Transducer Quick Start GuideJoséEmmanuelCasasMunguíaNo ratings yet
- Electronic V-MAC IV Vehicle Mgmt. and Control With Co-Pilot Display Operator ManualDocument133 pagesElectronic V-MAC IV Vehicle Mgmt. and Control With Co-Pilot Display Operator Manualsanach0412No ratings yet
- SteelsDocument72 pagesSteelsLLNo ratings yet
- Queer Ecology Critique - Georgetown 2014Document104 pagesQueer Ecology Critique - Georgetown 2014Evan JackNo ratings yet
- 11 - FORAGERS by Sam BoyerDocument106 pages11 - FORAGERS by Sam BoyerMurtaza HussainNo ratings yet
- Detecting Oil Spills from Remote SensorsDocument7 pagesDetecting Oil Spills from Remote SensorsFikri Adji Wiranto100% (1)
- Cheese Yoghurt and Ripening Cultures Reference Chart May 2020Document7 pagesCheese Yoghurt and Ripening Cultures Reference Chart May 2020AbitNo ratings yet
- Textiles and Clothing SustaninabilityDocument134 pagesTextiles and Clothing Sustaninabilitydike100% (1)
- Detailed Lesson Plan in General MathematicsDocument6 pagesDetailed Lesson Plan in General MathematicsAira Jane Irarum78% (18)
- EE 102 Cabric Final Spring08 o Id15Document10 pagesEE 102 Cabric Final Spring08 o Id15Anonymous TbHpFLKNo ratings yet
- Tables in National Plumbing CodeDocument4 pagesTables in National Plumbing CodeMartin GragasinNo ratings yet
- NPT Pipe Thread Sizes and TapersDocument1 pageNPT Pipe Thread Sizes and TapersRajesh J BharadwajNo ratings yet
- Acknowledgement For Project Report SampleDocument23 pagesAcknowledgement For Project Report SampleSiddhesh BhavsarNo ratings yet
- 5 Variable K-MapDocument15 pages5 Variable K-MapBen SewellNo ratings yet
- Diagrama 4 AMBIENT AIR TEMPER..Document1 pageDiagrama 4 AMBIENT AIR TEMPER..Gustavo PérezNo ratings yet
- Fs 1100 Flame Simulator Data Sheet en Us 584524Document4 pagesFs 1100 Flame Simulator Data Sheet en Us 584524Rildon Valqui CiezaNo ratings yet
- Demonstration POSTNATAL EXAMINATION Easy WayDocument9 pagesDemonstration POSTNATAL EXAMINATION Easy Wayjyoti singhNo ratings yet
- Common Mistakes in Dimensional Calibration MethodsDocument16 pagesCommon Mistakes in Dimensional Calibration MethodssujudNo ratings yet
- QRP Yu1lm SDR-RX TXDocument299 pagesQRP Yu1lm SDR-RX TXD BNo ratings yet
- HydrotherapyDocument7 pagesHydrotherapyGialys MoretaNo ratings yet
- 3M CatalogueDocument32 pages3M Cataloguefandi.azs37No ratings yet
- Owner S Manual Subaru LegacyDocument20 pagesOwner S Manual Subaru LegacyLexBgNo ratings yet
- Errata Introduction To Quantum Mechanics, David Griffiths, 2nd Ed.Document3 pagesErrata Introduction To Quantum Mechanics, David Griffiths, 2nd Ed.Marcel BezerraNo ratings yet
- Life Time Prediction of GRP Piping SystemsDocument15 pagesLife Time Prediction of GRP Piping SystemsRamon FrenchNo ratings yet
- Taylors 10 Minute Diagnosis Manual Symptoms and Signs in The Time Limited Encounter PDFDocument656 pagesTaylors 10 Minute Diagnosis Manual Symptoms and Signs in The Time Limited Encounter PDF19marvoloNo ratings yet
- AbstractDocument2 pagesAbstractramyaNo ratings yet
- F0a7c Compal LA-A994p r1.0 2014Document38 pagesF0a7c Compal LA-A994p r1.0 2014DeyProNo ratings yet
- Amco Veba Marine - Brochure - LRDocument24 pagesAmco Veba Marine - Brochure - LRHươngTpuNo ratings yet
- Giddings & Lewis Sect08 HydDocument24 pagesGiddings & Lewis Sect08 HydAngel AdautaNo ratings yet