You might also like
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Complex Exponential Pseudomodes of LTI Operators Over Finite IntervalsDocument4 pagesComplex Exponential Pseudomodes of LTI Operators Over Finite IntervalsrallabhandiSKNo ratings yet
- Assignment 2 Img PDFDocument7 pagesAssignment 2 Img PDFUtkrisht KashyapNo ratings yet
- Moment-Generating FunctionDocument7 pagesMoment-Generating Functionbrown222No ratings yet
- OEV Poster Gernot A0Document1 pageOEV Poster Gernot A0Michael KollerNo ratings yet
- Introduction To Brukers ScanAsyst and PeakForce Tapping Atomic Force Microscopy Technology - AN133Document12 pagesIntroduction To Brukers ScanAsyst and PeakForce Tapping Atomic Force Microscopy Technology - AN133Fabien CazesNo ratings yet
- Cross CorrelationDocument10 pagesCross Correlationisabella343No ratings yet
- Kfvsexp Final LaviolaDocument8 pagesKfvsexp Final LaviolaMila ApriliyantiNo ratings yet
- 2022 APS April Meeting F01 00048 Qian ChenDocument1 page2022 APS April Meeting F01 00048 Qian ChenGeorge ChenNo ratings yet
- The Relation Between Range Sampling Rate, System Bandwidth, and Variance Reduction in Spectral Averaging For Meteorological RadarDocument7 pagesThe Relation Between Range Sampling Rate, System Bandwidth, and Variance Reduction in Spectral Averaging For Meteorological Radarlpgx1962No ratings yet
- On The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysDocument8 pagesOn The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysMuhammad KhawarNo ratings yet
- Cive302 - Chapter 4 PDFDocument45 pagesCive302 - Chapter 4 PDFAhad NaeemNo ratings yet
- On The Use of Windows For Harmonic AnalysisDocument33 pagesOn The Use of Windows For Harmonic AnalysisDaniel FrancoNo ratings yet
- AutocovarianceDocument3 pagesAutocovarianceisabella343No ratings yet
- Computing Convolutions of Measures - What's NewDocument8 pagesComputing Convolutions of Measures - What's New曹琪勇No ratings yet
- A Practical, Precise Method For Frequency Tracking and Phasor EstimationDocument6 pagesA Practical, Precise Method For Frequency Tracking and Phasor EstimationFabien CallodNo ratings yet
- Velocity Displacement AccelearationDocument14 pagesVelocity Displacement AccelearationNMSYEDNo ratings yet
- LTI SystemsDocument3 pagesLTI SystemsMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Finite Impulse Response Filter: Presentation By: Pravin Kumar SSN College of EngineeringDocument49 pagesFinite Impulse Response Filter: Presentation By: Pravin Kumar SSN College of Engineeringsach jonesNo ratings yet
- Noise in GroverDocument7 pagesNoise in GroverImama RajaNo ratings yet
- A Piloted Adaptive Notch Filter: Yong Ching Lim, Fellow, IEEE, Yue Xian Zou, Member, IEEE, and N. ZhengDocument14 pagesA Piloted Adaptive Notch Filter: Yong Ching Lim, Fellow, IEEE, Yue Xian Zou, Member, IEEE, and N. ZhengsophiaaaNo ratings yet
- Proportionate Normalized Least-Mean-Squares Adaptation in Echo CancelersDocument11 pagesProportionate Normalized Least-Mean-Squares Adaptation in Echo Cancelersc4734168No ratings yet
- Analysis of Very Fast Transient Over Voltages in 150MVA 500KV Transformer by Using Wavelet TransformDocument5 pagesAnalysis of Very Fast Transient Over Voltages in 150MVA 500KV Transformer by Using Wavelet TransformaocalayNo ratings yet
- Poles, Zeros, and Higher Order FiltersDocument7 pagesPoles, Zeros, and Higher Order FiltersJanNo ratings yet
- Multi-Focus Image Fusion Using Discrete Cosine Harmonic Wavelet TransformDocument7 pagesMulti-Focus Image Fusion Using Discrete Cosine Harmonic Wavelet TransformRaad FarhoodNo ratings yet
- Bilinear Transform: Cite References or SourcesDocument6 pagesBilinear Transform: Cite References or SourcessuhmudNo ratings yet
- The Particle Swarm-Explosion, Stability, and Convergence in A Multidimensional Complex SpaceDocument16 pagesThe Particle Swarm-Explosion, Stability, and Convergence in A Multidimensional Complex SpaceAbolfazl AbbasiyanNo ratings yet
- FinalDocument78 pagesFinalsameera0627No ratings yet
- Eeiol 2006feb04 Ems TaDocument5 pagesEeiol 2006feb04 Ems TaEdsonNo ratings yet
- V Asin (BT) A Abcos (BT) : Conversion Between Displacement, Velocity and AccelerationDocument6 pagesV Asin (BT) A Abcos (BT) : Conversion Between Displacement, Velocity and Accelerationraghu_mnNo ratings yet
- 6.730 Physics For Solid State Applications: Lecture 32: Introduction To Boltzmann TransportDocument12 pages6.730 Physics For Solid State Applications: Lecture 32: Introduction To Boltzmann TransportHùng NguyễnNo ratings yet
- Seismic Data Processing and InterpretationDocument15 pagesSeismic Data Processing and InterpretationmustafaNo ratings yet
- Chapter 9: Applications of The DFT: Impulse Response or Impulse Response FunctionDocument2 pagesChapter 9: Applications of The DFT: Impulse Response or Impulse Response FunctionPremanand SubramaniNo ratings yet
- Indirect Fourier TransformationDocument2 pagesIndirect Fourier Transformationvolly666No ratings yet
- A Comparitive Study of Kalman Filter Extended Kalman Filter and UnscentedDocument9 pagesA Comparitive Study of Kalman Filter Extended Kalman Filter and Unscentedthe man with a brainNo ratings yet
- Sagha, Hossein Ledwich, Gerard Ghosh, Arindam Nourbakhsh, GhavameddinDocument7 pagesSagha, Hossein Ledwich, Gerard Ghosh, Arindam Nourbakhsh, GhavameddinEdsonNo ratings yet
- Mass Unbalance Analysis FFT An Lissajous DiagramDocument6 pagesMass Unbalance Analysis FFT An Lissajous DiagramJuan Angel Martinez RamirezNo ratings yet
- p38 PDFDocument8 pagesp38 PDFsamandondonNo ratings yet
- Tac 2008 927682Document6 pagesTac 2008 927682Ranjit SinghNo ratings yet
- Faksasfi Fanasf FaDocument6 pagesFaksasfi Fanasf FaPedro ErniasNo ratings yet
- Priority Queueing Systems: From Probability Generating Functions To Tail ProbabilitiesDocument23 pagesPriority Queueing Systems: From Probability Generating Functions To Tail ProbabilitiesSadasada SadasadasadaNo ratings yet
- Unit - 1.2-15.07.2020-EC8533 - DTSP-Basics of DFTDocument13 pagesUnit - 1.2-15.07.2020-EC8533 - DTSP-Basics of DFTmakNo ratings yet
- Correlation Example: How DATS For Windows Can Be Used To Analyse CorrelationDocument3 pagesCorrelation Example: How DATS For Windows Can Be Used To Analyse CorrelationV.RamachandranNo ratings yet
- Study of Velocity Potential Function and Stream Function - Final PresentationDocument39 pagesStudy of Velocity Potential Function and Stream Function - Final PresentationFarooq ShahNo ratings yet
- Stationary Process: ConttsDocument4 pagesStationary Process: ConttsAhmed AlzaidiNo ratings yet
- 4) Time-Frequency and Time-Scale Analysis: An AlternativeDocument1 page4) Time-Frequency and Time-Scale Analysis: An AlternativePablo Loste RamosNo ratings yet
- DSPDocument6 pagesDSPSibasish Singh SamantaNo ratings yet
- What Is Response Spectrum AnalysisDocument43 pagesWhat Is Response Spectrum AnalysisEJOUMALENo ratings yet
- Dynamic CorrectionDocument18 pagesDynamic CorrectionMajid AliNo ratings yet
- 'S Method) Is Used In: TustinDocument9 pages'S Method) Is Used In: TustinTom JerryNo ratings yet
- Secant MethodDocument4 pagesSecant MethodRavinder SinghNo ratings yet
- The Particle Swarm - Explosion Stability and Convergence in A Multidimensional Complex SpaceDocument16 pagesThe Particle Swarm - Explosion Stability and Convergence in A Multidimensional Complex SpaceCarlos AdrianoNo ratings yet
- Lec 01 Random Variables and FiltersDocument30 pagesLec 01 Random Variables and FiltersEng Adel khaledNo ratings yet
- Fractional Fourier TransformDocument12 pagesFractional Fourier Transformvolly666No ratings yet
- An Exact and Uniformly Convergent Arbitrary Order DifferentiatorDocument6 pagesAn Exact and Uniformly Convergent Arbitrary Order DifferentiatorSana OthmanNo ratings yet
- Ego Motion Estimation PaperDocument13 pagesEgo Motion Estimation PaperFabricio AmaguañaNo ratings yet
- To StudyDocument8 pagesTo StudybhavanicengppNo ratings yet
- Properties of Soybean Biodiesel Blended With Palm or Tallow-IRECHE - VOL - 4 - N - 4-6Document6 pagesProperties of Soybean Biodiesel Blended With Palm or Tallow-IRECHE - VOL - 4 - N - 4-6Vinícius CôrtesNo ratings yet
- GPLDocument5 pagesGPLAjay DevNo ratings yet
- 4 YekoladioDocument17 pages4 YekoladioVinícius CôrtesNo ratings yet
- This Is My Boss, Jonathan Hart, A Self-Made Millionaire, He's Quite A GDocument1 pageThis Is My Boss, Jonathan Hart, A Self-Made Millionaire, He's Quite A GVinícius CôrtesNo ratings yet
- Suffering FavoriteDocument2 pagesSuffering FavoriteVinícius CôrtesNo ratings yet
- Assurance in DoDocument2 pagesAssurance in DoVinícius CôrtesNo ratings yet
- Eula Microsoft Visual StudioDocument3 pagesEula Microsoft Visual StudioqwwerttyyNo ratings yet
- Analysis of Automobile SuspensionDocument13 pagesAnalysis of Automobile SuspensionAfeez AzizNo ratings yet
- Mini Baja TemplateDocument5 pagesMini Baja TemplateVinícius CôrtesNo ratings yet
- Full Text 01Document92 pagesFull Text 01Vinícius CôrtesNo ratings yet
- Basic Adams TutorialDocument100 pagesBasic Adams TutorialsaptagunungNo ratings yet
- VocabularyDocument1 pageVocabularyVinícius CôrtesNo ratings yet
- Full Text 01Document92 pagesFull Text 01Vinícius CôrtesNo ratings yet
- Process Control and Common TermsDocument210 pagesProcess Control and Common TermsGeorge Markas100% (1)
- Engine Room Simulator: Ers-L11 Man B&W-5L90Mc VLCCDocument36 pagesEngine Room Simulator: Ers-L11 Man B&W-5L90Mc VLCCJøn Bilbao Mallona100% (1)
- Modbus Communications Reference Guide: MC Series DrivesDocument35 pagesModbus Communications Reference Guide: MC Series DrivesjanuszekNo ratings yet
- Drone Simulation and Control Usin Matlab and SimulinkDocument31 pagesDrone Simulation and Control Usin Matlab and Simulinkabenezer zegeyeNo ratings yet
- (Advances in Industrial Control) M. Chidambaram, Nikita Saxena (Auth.) - Relay Tuning of PID Controllers - For Unstable MIMO Processes-Springer Singapore (2018) PDFDocument223 pages(Advances in Industrial Control) M. Chidambaram, Nikita Saxena (Auth.) - Relay Tuning of PID Controllers - For Unstable MIMO Processes-Springer Singapore (2018) PDFG VascoNo ratings yet
- DENAIR MAM6090 Control Panel Manual PDFDocument43 pagesDENAIR MAM6090 Control Panel Manual PDFLuis Batlle Aguilera100% (2)
- Design by Root Locus PDFDocument26 pagesDesign by Root Locus PDFAtikah AbdallaNo ratings yet
- Assignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsDocument6 pagesAssignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsSyed AfzalNo ratings yet
- Wartsila DP Maintenance Course Manual - Rev ADocument305 pagesWartsila DP Maintenance Course Manual - Rev AHrNo ratings yet
- Fuzzy Logic Control of Blood Pressure During AnesthesiaDocument14 pagesFuzzy Logic Control of Blood Pressure During AnesthesiaChennai Samshan J100% (1)
- PID Explained For Process Engineers - Part 1 - The Basic Control Equation PDFDocument8 pagesPID Explained For Process Engineers - Part 1 - The Basic Control Equation PDFCristian UrregoNo ratings yet
- VFD Domestic Water Booster Standard Sequence of Operation PDFDocument13 pagesVFD Domestic Water Booster Standard Sequence of Operation PDFCristianDumitruNo ratings yet
- ABB VFD Operation Manual - v1.2Document22 pagesABB VFD Operation Manual - v1.2Yuriy LobanovNo ratings yet
- Advanced PID ControlDocument15 pagesAdvanced PID ControlAldrian MacuaNo ratings yet
- P, PI and PID Controllers - A Comparative StudyDocument6 pagesP, PI and PID Controllers - A Comparative StudySushil NamoijamNo ratings yet
- Simulink-Based Codesign and CosimulationDocument31 pagesSimulink-Based Codesign and CosimulationTatiano BrolloNo ratings yet
- A Handbook of Mathematical Mode - Dr. Ranja SarkerDocument232 pagesA Handbook of Mathematical Mode - Dr. Ranja SarkerJohn100% (1)
- DZF 6050Document13 pagesDZF 6050Kevin José SánchezNo ratings yet
- Linear Control Systems (EE-3052) : Lecture-11 Steady State ErrorDocument24 pagesLinear Control Systems (EE-3052) : Lecture-11 Steady State Errorusama asifNo ratings yet
- Vtol Design PDFDocument25 pagesVtol Design PDFElner CrystianNo ratings yet
- Role of SCADA in Hydro Power PlantDocument6 pagesRole of SCADA in Hydro Power PlantIndin HasanNo ratings yet
- Eliwell Product Catalogue 2008-09Document90 pagesEliwell Product Catalogue 2008-09viorel danilaNo ratings yet
- So Many Tuning Rules, So Little Time: Control Talk ColumnsDocument36 pagesSo Many Tuning Rules, So Little Time: Control Talk ColumnsIvan BevandaNo ratings yet
- Nseries InverterDocument20 pagesNseries InverterAM76No ratings yet
- LC 5296 atDocument2 pagesLC 5296 atRohit BerwalNo ratings yet
- Temperature ControllerDocument8 pagesTemperature ControllerWai Ee YapNo ratings yet
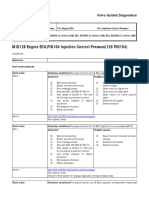
- MID128 Engine ECU PID164 Injection Control Pressure (128 PID164)Document2 pagesMID128 Engine ECU PID164 Injection Control Pressure (128 PID164)Naing Min Htun100% (6)
- DC Motor Closed LoopDocument11 pagesDC Motor Closed Looprichard chombaNo ratings yet
- Igs NT Async Mint 1 2Document100 pagesIgs NT Async Mint 1 2Victor Julian Ortiz PorrasNo ratings yet