You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Armstrong Basic Topology - Solutions BlikasDocument131 pagesArmstrong Basic Topology - Solutions BlikasDavidMarcosPerezMuñoz100% (2)
- (Michael Farber) Invitation To Topological RoboticDocument145 pages(Michael Farber) Invitation To Topological RoboticLeonora C. Ford100% (3)
- Study OnDocument5 pagesStudy OnBilal SaeedNo ratings yet
- Enhanced Flat-Top Band-Rejection Filter Based On Reflective Helical Long-Period Fiber GratingsDocument3 pagesEnhanced Flat-Top Band-Rejection Filter Based On Reflective Helical Long-Period Fiber GratingsBilal SaeedNo ratings yet
- Study of Cloud Computing Intention of Use For Learning Improvement in Higher EducationDocument5 pagesStudy of Cloud Computing Intention of Use For Learning Improvement in Higher EducationBilal SaeedNo ratings yet
- Figure 1: General and Specific Parameters Screen LayoutDocument5 pagesFigure 1: General and Specific Parameters Screen LayoutBilal SaeedNo ratings yet
- Many-Objective Particle Swarm Optimization Using Two-Stage Strategy and Parallel Cell Coordinate SystemDocument14 pagesMany-Objective Particle Swarm Optimization Using Two-Stage Strategy and Parallel Cell Coordinate SystemBilal SaeedNo ratings yet
- Constructions of Binary Sequence Pairs of Period 3p With Optimal Three-Level CorrelationDocument5 pagesConstructions of Binary Sequence Pairs of Period 3p With Optimal Three-Level CorrelationBilal SaeedNo ratings yet
- (Moustafa Samir Moussa) Nitrification in Saline in PDFDocument176 pages(Moustafa Samir Moussa) Nitrification in Saline in PDFBilal SaeedNo ratings yet
- Crystal Report Viewer 1Document4 pagesCrystal Report Viewer 1Bilal SaeedNo ratings yet
- 10 1109@cast 2016 7915031Document5 pages10 1109@cast 2016 7915031Bilal SaeedNo ratings yet
- Whatisrehabilitation 110920071017 Phpapp01Document10 pagesWhatisrehabilitation 110920071017 Phpapp01Bilal SaeedNo ratings yet
- Chapter 9Document22 pagesChapter 9mohanjaiNo ratings yet
- Chapter 9Document22 pagesChapter 9mohanjaiNo ratings yet
- Electrical Computer Engineering Graduate HandbookDocument36 pagesElectrical Computer Engineering Graduate HandbookBilal SaeedNo ratings yet
- Unit 4 Price and Output Decisions Under Different Market StructuresDocument108 pagesUnit 4 Price and Output Decisions Under Different Market Structuresjeganrajraj80% (5)
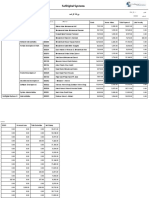
- Salary Sheet: September-2016Document3 pagesSalary Sheet: September-2016Bilal SaeedNo ratings yet
- A Novel Technique For Human Face Recognition Using Nonlinear Curvelet Feature SubspaceDocument10 pagesA Novel Technique For Human Face Recognition Using Nonlinear Curvelet Feature SubspaceBilal SaeedNo ratings yet
- Concept of An Islamic State in PakistanDocument247 pagesConcept of An Islamic State in PakistanZahir Mengal100% (2)
- One-Pot Synthesis of CuO Nanoflower-Decorated Reduced Graphene Oxide and Its Application To Photocatalytic Degradation of DyeDocument7 pagesOne-Pot Synthesis of CuO Nanoflower-Decorated Reduced Graphene Oxide and Its Application To Photocatalytic Degradation of DyeBilal SaeedNo ratings yet
- Effects of Glucocorticoids On Cultured SkinDocument14 pagesEffects of Glucocorticoids On Cultured SkinBilal SaeedNo ratings yet
- A Novel Technique For Human Face Recognition Using Nonlinear Curvelet Feature SubspaceDocument10 pagesA Novel Technique For Human Face Recognition Using Nonlinear Curvelet Feature SubspaceBilal SaeedNo ratings yet
- Electrochemical Reduction of CO Using Bi-Layer Cu O ElectrodesDocument5 pagesElectrochemical Reduction of CO Using Bi-Layer Cu O ElectrodesBilal SaeedNo ratings yet
- 61850 GOOSE, SV, MMS appDocument1 page61850 GOOSE, SV, MMS appBilal SaeedNo ratings yet
- Zinc Deficiency and Childhood Infectious DiseaseDocument5 pagesZinc Deficiency and Childhood Infectious DiseaseBilal SaeedNo ratings yet
- Sonyplaystation3 13077276444318 Phpapp01 110610124807 Phpapp01Document53 pagesSonyplaystation3 13077276444318 Phpapp01 110610124807 Phpapp01Kristian GunawanNo ratings yet
- Communication Port SettingsDocument1 pageCommunication Port SettingsBilal SaeedNo ratings yet
- "Advanced Studies in Pure Mathematics" Volume 20Document376 pages"Advanced Studies in Pure Mathematics" Volume 20maria__luceroNo ratings yet
- Face Numbers of Pseudomanifolds With Isolated Singularities: Isabella NovikDocument19 pagesFace Numbers of Pseudomanifolds With Isolated Singularities: Isabella NovikAndres FelipeNo ratings yet
- Cores MarchDocument20 pagesCores MarchEpic WinNo ratings yet
- Olga Plamenevskaya and Jeremy Van Horn-Morris - Planar Open Books, Monodromy Factorizations, and Symplectic FillingsDocument20 pagesOlga Plamenevskaya and Jeremy Van Horn-Morris - Planar Open Books, Monodromy Factorizations, and Symplectic FillingsCore0932No ratings yet
- Topologia - Novikov PDFDocument321 pagesTopologia - Novikov PDFJimmy Bomfim de Jesus100% (1)
- My Undergraduate Project On Persistent Homology For Topological Data AnalysisDocument56 pagesMy Undergraduate Project On Persistent Homology For Topological Data AnalysisOlumuyiwa AgboolaNo ratings yet
- Homology (Mathematics)Document5 pagesHomology (Mathematics)Hameed KhanNo ratings yet
- Book of Abstract BYMAT 3rd EditionDocument71 pagesBook of Abstract BYMAT 3rd EditionAlba García RuizNo ratings yet
- University of Delhi: Semester Examination May-June 2019 Statement of MarksDocument2 pagesUniversity of Delhi: Semester Examination May-June 2019 Statement of MarksTamannaNo ratings yet
- (Graduate Studies in Mathematics 110) Matthias Kreck-Differential Algebraic Topology - From Stratifolds To Exotic Spheres-American Mathematical Society (2010)Document234 pages(Graduate Studies in Mathematics 110) Matthias Kreck-Differential Algebraic Topology - From Stratifolds To Exotic Spheres-American Mathematical Society (2010)Sixta Vivanco100% (1)
- Algebraic Topology_ Homology and Cohomology_Andrew H. WallaceDocument288 pagesAlgebraic Topology_ Homology and Cohomology_Andrew H. WallacegeorgetacaprarescuNo ratings yet
- Mathematics For Physics. An Illustrated Handbook (PDFDrive)Document294 pagesMathematics For Physics. An Illustrated Handbook (PDFDrive)aNo ratings yet
- GTM 71 Riemann Surfaces (Hershel M. Farkas, Irwin Kra (Auth.) )Document352 pagesGTM 71 Riemann Surfaces (Hershel M. Farkas, Irwin Kra (Auth.) )1755876579No ratings yet
- Homology Theory Lecture NotesDocument74 pagesHomology Theory Lecture NotesjjwfishNo ratings yet
- 2 PDFDocument89 pages2 PDFAtta SoomroNo ratings yet
- Simplicial Homology - Mathematics Is A ScienceddDocument14 pagesSimplicial Homology - Mathematics Is A ScienceddmobiusNo ratings yet
- TOPOLOGY OF RANGE PATCHESDocument8 pagesTOPOLOGY OF RANGE PATCHESCara CataNo ratings yet
- Integrals of Equivariant Forms and A Gauss-Bonnet Theorem For Constructible SheavesDocument38 pagesIntegrals of Equivariant Forms and A Gauss-Bonnet Theorem For Constructible SheavesAllen Cristhian Romero LeivaNo ratings yet
- MSC GuideDocument26 pagesMSC GuideetNo ratings yet
- Topology and Data: Gunnar CarlssonDocument54 pagesTopology and Data: Gunnar CarlssonMaria HernándezNo ratings yet
- Satya AlgebraicDocument351 pagesSatya AlgebraicJuanFelipeBuitragoVelezNo ratings yet
- Algebraic Topology Solutions 3Document7 pagesAlgebraic Topology Solutions 3Chris WalshNo ratings yet
- Categorical Non-Properness in Wrapped Floer Theory: Sheel GanatraDocument19 pagesCategorical Non-Properness in Wrapped Floer Theory: Sheel GanatraDebtanu SenNo ratings yet
- Algorithmic and Computer Methods For Three-ManifoldsDocument342 pagesAlgorithmic and Computer Methods For Three-ManifoldsOmar Alexis Cruz CastilloNo ratings yet
- Academic Syllabus For M. Sc. in Mathematics: Binod Bihari Mahto Koyalanchal University, Dhanbad WWW - Bbmku.ac - inDocument28 pagesAcademic Syllabus For M. Sc. in Mathematics: Binod Bihari Mahto Koyalanchal University, Dhanbad WWW - Bbmku.ac - inRahul NayakNo ratings yet
- Matthew Hedden - Some Remarks On Cabling, Contact Structures, and Complex CurvesDocument11 pagesMatthew Hedden - Some Remarks On Cabling, Contact Structures, and Complex CurvesDuncan_VimNo ratings yet
- Alpha Shapes - CelikikDocument40 pagesAlpha Shapes - CelikikJorge LeandroNo ratings yet
- Maclane HomologyDocument429 pagesMaclane HomologyValentín MijoevichNo ratings yet