You might also like
- WCA: A Weighted Clustering Algorithm For Mobile Ad Hoc NetworksDocument12 pagesWCA: A Weighted Clustering Algorithm For Mobile Ad Hoc NetworksalioneNo ratings yet
- Las Vegas ICWNDocument7 pagesLas Vegas ICWNNikhil PatilNo ratings yet
- Hierarchical Control ClusteringDocument10 pagesHierarchical Control ClusteringAshraful IslamNo ratings yet
- A Review of Cluster Formation Schemes in ManetDocument5 pagesA Review of Cluster Formation Schemes in ManetInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Multicluster, Mobile, Multimedia Radio NetworkDocument11 pagesMulticluster, Mobile, Multimedia Radio NetworkRupa BachhuNo ratings yet
- Adaptive Clustering For Mobile Wireless Networks : Chunhung Richard Lin and Mario GerlaDocument21 pagesAdaptive Clustering For Mobile Wireless Networks : Chunhung Richard Lin and Mario GerlaPratyushNo ratings yet
- A Survey of Weight-Based Clustering Algorithms in MANET: Prerna Malhotra, Ajay DurejaDocument7 pagesA Survey of Weight-Based Clustering Algorithms in MANET: Prerna Malhotra, Ajay DurejaInternational Organization of Scientific Research (IOSR)No ratings yet
- Research Article: A Scheduling Algorithm For Minimizing The Packet Error Probability in Clusterized TDMA NetworksDocument10 pagesResearch Article: A Scheduling Algorithm For Minimizing The Packet Error Probability in Clusterized TDMA Networkscypa11No ratings yet
- Ijasuc 030602Document13 pagesIjasuc 030602ijasucNo ratings yet
- Energy Aware and Stable Multipath Routing Protocol in Clustered Wireless Ad Hoc NetworksDocument9 pagesEnergy Aware and Stable Multipath Routing Protocol in Clustered Wireless Ad Hoc Networksأبو أيوب تافيلالتNo ratings yet
- Comprehensive Study of Routing Management in Wireless Sensor Networks-Part-2Document11 pagesComprehensive Study of Routing Management in Wireless Sensor Networks-Part-2tranhoahueNo ratings yet
- Enhancement in Divide and Conquer Scheme To Increase Efficiency of The NetworksDocument5 pagesEnhancement in Divide and Conquer Scheme To Increase Efficiency of The NetworksijsretNo ratings yet
- A Quality of Service Driven Approach For Clustering in Mobile Ad Hoc Networks Based On Metrics Adaptation: Looking Beyond ClusteringDocument12 pagesA Quality of Service Driven Approach For Clustering in Mobile Ad Hoc Networks Based On Metrics Adaptation: Looking Beyond Clusteringأبو أيوب تافيلالتNo ratings yet
- Merging Ultra-Low Duty Cycle NetworksDocument12 pagesMerging Ultra-Low Duty Cycle Networksmaarten_van_steenNo ratings yet
- GS: Scalable Self-Configuration and Self-Healing in Wireless Sensor NetworksDocument22 pagesGS: Scalable Self-Configuration and Self-Healing in Wireless Sensor NetworksManishaPuniaNo ratings yet
- 000000da PDFDocument24 pages000000da PDFMukesh KumarNo ratings yet
- Reference 1 2009Document6 pagesReference 1 2009Rajkumar JainNo ratings yet
- Al-Obaiady Springer PDFDocument12 pagesAl-Obaiady Springer PDFIolanda AlecsandrescuNo ratings yet
- Mobility-Aware and Load Balancing Based Clustering Algorithm For Energy Conservation in MANETDocument4 pagesMobility-Aware and Load Balancing Based Clustering Algorithm For Energy Conservation in MANETDipak KumarNo ratings yet
- Min Max ClusterDocument6 pagesMin Max ClusterHarshith BhatNo ratings yet
- Distance Based Cluster Formation Technique For LEACH Protocol in Wireless Sensor NetworkDocument5 pagesDistance Based Cluster Formation Technique For LEACH Protocol in Wireless Sensor NetworkInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Review of Current Routing Protocols For Ad Hoc Mobile Wireless NetworksDocument10 pagesA Review of Current Routing Protocols For Ad Hoc Mobile Wireless Networkskidxu2002No ratings yet
- Comprehensive Study of Routing Management in Wireless Sensor Networks-Part-1Document8 pagesComprehensive Study of Routing Management in Wireless Sensor Networks-Part-1tamfinNo ratings yet
- Adaptive Sleep Discipline For Energy Conservation and Robustness in Dense Sensor NetworksDocument6 pagesAdaptive Sleep Discipline For Energy Conservation and Robustness in Dense Sensor Networksinga892No ratings yet
- 1.1 Problem Addressed and MotivationDocument13 pages1.1 Problem Addressed and MotivationpiramanayagamNo ratings yet
- A Clustering Algorithm Based On Mobility Properties inDocument15 pagesA Clustering Algorithm Based On Mobility Properties inPrasath SivaSubramanianNo ratings yet
- Design of A Distributed Energy-E Cient Clustering Algorithm For Heterogeneous Wireless Sensor NetworksDocument8 pagesDesign of A Distributed Energy-E Cient Clustering Algorithm For Heterogeneous Wireless Sensor NetworksShital JoshiNo ratings yet
- Research Article: A Context Aware Cooperative Communication Method in Wireless Sensor NetworksDocument7 pagesResearch Article: A Context Aware Cooperative Communication Method in Wireless Sensor NetworksVikas KumarNo ratings yet
- Abstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aDocument6 pagesAbstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aVidvek InfoTechNo ratings yet
- CFMS: A Cluster-Based Convergecast Framework For Dense Multi-Sink Wireless Sensor NetworksDocument19 pagesCFMS: A Cluster-Based Convergecast Framework For Dense Multi-Sink Wireless Sensor NetworksJohn BergNo ratings yet
- 31 - JCIT - JUNE - Binder1-31Document8 pages31 - JCIT - JUNE - Binder1-31Aditya WijayantoNo ratings yet
- Banerjee Infocom07Document9 pagesBanerjee Infocom07aathirakbNo ratings yet
- Mass04 PDFDocument9 pagesMass04 PDFegupta1No ratings yet
- Ijct V3i2p21Document5 pagesIjct V3i2p21International Journal of Engineering and TechniquesNo ratings yet
- Cluster Based Routing Mechanism For Advanced Delay-Tolerant NetworksDocument4 pagesCluster Based Routing Mechanism For Advanced Delay-Tolerant NetworksAnonymous a6uL8ryBJjNo ratings yet
- Optimizing Energy Efficiency in Wireless Sensor Network Using LEACH ProtocolDocument5 pagesOptimizing Energy Efficiency in Wireless Sensor Network Using LEACH ProtocolInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of The Performance of Wireless Sensor Networks Operating With Smart AntennasDocument21 pagesStudy of The Performance of Wireless Sensor Networks Operating With Smart AntennasCarmen BakerNo ratings yet
- P E R P W S N: Erformance Valuation of Outing Rotocols in Ireless Ensor EtworksDocument10 pagesP E R P W S N: Erformance Valuation of Outing Rotocols in Ireless Ensor EtworksHazeena HaneefNo ratings yet
- Scalability and Routing Performance of Future Autonomous NetworksDocument6 pagesScalability and Routing Performance of Future Autonomous NetworksPrakash R ChetryNo ratings yet
- J Suscom 2017 08 001Document17 pagesJ Suscom 2017 08 001Nabiel KmNo ratings yet
- Effective Location-Guided Tree Construction Algorithms For Small Group Multicast in MANETDocument10 pagesEffective Location-Guided Tree Construction Algorithms For Small Group Multicast in MANETgopinathsri9No ratings yet
- Modelling and Simulation of Load Balancing in Computer NetworkDocument7 pagesModelling and Simulation of Load Balancing in Computer NetworkAJER JOURNALNo ratings yet
- A New Clustering Algorithm For Manets: Abstract-Mobile Ad Hoc Network (Manet) Is The CooperativeDocument6 pagesA New Clustering Algorithm For Manets: Abstract-Mobile Ad Hoc Network (Manet) Is The CooperativeParamesh ThangarajNo ratings yet
- A Clustering Protocol For A Non - Uniformly Distributed Wireless Sensor NetworkDocument7 pagesA Clustering Protocol For A Non - Uniformly Distributed Wireless Sensor NetworkEighthSenseGroupNo ratings yet
- K Mobicom04Document15 pagesK Mobicom04Santosh KrishnaNo ratings yet
- Applying Time-Division Multiplexing in Star-Based Optical NetworksDocument4 pagesApplying Time-Division Multiplexing in Star-Based Optical NetworksJuliana CantilloNo ratings yet
- Cisco Spine LeafDocument5 pagesCisco Spine LeafMasih FavaNo ratings yet
- A Cross-Layer Architecture For Autonomic CommunicationsDocument12 pagesA Cross-Layer Architecture For Autonomic CommunicationsVishabh GoelNo ratings yet
- IJMNCTDocument12 pagesIJMNCTLawrence AveryNo ratings yet
- Cluster Based Wireless Sensor Networks' Optimization Under Energy ConstraintsDocument6 pagesCluster Based Wireless Sensor Networks' Optimization Under Energy ConstraintssoulyenNo ratings yet
- A Unified Energy Efficient Cluster ID Based Routing Scheme For Wireless Sensor Networks-A More Realistic Analysis - ICNC2007Document6 pagesA Unified Energy Efficient Cluster ID Based Routing Scheme For Wireless Sensor Networks-A More Realistic Analysis - ICNC2007irfanahmed446470No ratings yet
- Liana Tamimi@ppu - EduDocument12 pagesLiana Tamimi@ppu - Eduبيكاتشو ChooNo ratings yet
- IJMNCTDocument12 pagesIJMNCTLawrence AveryNo ratings yet
- Mobility-Aware Hierarchical Clustering in Mobile Wireless Sensor NetworksDocument10 pagesMobility-Aware Hierarchical Clustering in Mobile Wireless Sensor Networksyann chebuNo ratings yet
- Research Article: Cross-Layer Support For Energy Efficient Routing in Wireless Sensor NetworksDocument10 pagesResearch Article: Cross-Layer Support For Energy Efficient Routing in Wireless Sensor NetworksNaveen ChilamkurtiNo ratings yet
- Multihop Clustering Algorithm For Load Balancing in Wireless Sensor NetworksDocument13 pagesMultihop Clustering Algorithm For Load Balancing in Wireless Sensor NetworksmmsadiqNo ratings yet
- Mathematics: An Analytical Model For 5G Network Resource Sharing With Flexible SLA-Oriented Slice IsolationDocument19 pagesMathematics: An Analytical Model For 5G Network Resource Sharing With Flexible SLA-Oriented Slice Isolationzayyanu yunusaNo ratings yet
- GROUP: A Grid-Clustering Routing Protocol For Wireless Sensor NetworksDocument5 pagesGROUP: A Grid-Clustering Routing Protocol For Wireless Sensor NetworksCool MtianNo ratings yet
- Radio Resource Management in Multi-Tier Cellular Wireless NetworksFrom EverandRadio Resource Management in Multi-Tier Cellular Wireless NetworksNo ratings yet
- N2N-Link User ManualDocument163 pagesN2N-Link User Manualrazali1982No ratings yet
- FTAPI Encryption Whitepaper SecuTransfer4.0 EN 10072017Document30 pagesFTAPI Encryption Whitepaper SecuTransfer4.0 EN 10072017ciekawskiNo ratings yet
- Lambert TCO White Paper IP CCTVDocument9 pagesLambert TCO White Paper IP CCTVvicvaldonNo ratings yet
- NbIoT DimensioningDocument2 pagesNbIoT DimensioningsnsathwickNo ratings yet
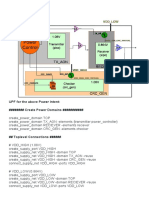
- UPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Document4 pagesUPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Mayur Agarwal50% (2)
- NokiaDocument12 pagesNokiaNirmal JhaNo ratings yet
- Tevii Dvb-S/S2 Pci-E Card S470: Add Digital TV Reception To Your PCDocument6 pagesTevii Dvb-S/S2 Pci-E Card S470: Add Digital TV Reception To Your PCAlexander WieseNo ratings yet
- Brkccie 3203Document93 pagesBrkccie 3203alfagemeoNo ratings yet
- IoT Assignment #2Document4 pagesIoT Assignment #2Bilal HoorNo ratings yet
- WC Lab FileDocument30 pagesWC Lab FilekannNo ratings yet
- Quiz On Mobile CommunicationDocument12 pagesQuiz On Mobile Communicationkundan1094No ratings yet
- 308 Plus Programming Manual 05 Oct 14Document5 pages308 Plus Programming Manual 05 Oct 14Hari NarayanaNo ratings yet
- Display GuidelinesDocument12 pagesDisplay GuidelinesAtul BangalNo ratings yet
- Steganography: Embedding Text Within ImageDocument21 pagesSteganography: Embedding Text Within ImageDebasish SahooNo ratings yet
- 18th Aug Master Data Tracker Aug 2011Document202 pages18th Aug Master Data Tracker Aug 2011priyank623No ratings yet
- Hemispheregnss Athena Overviewpaper 20181119Document3 pagesHemispheregnss Athena Overviewpaper 20181119audilemansNo ratings yet
- Developing An End-to-End Secure Chat Application: November 2017Document7 pagesDeveloping An End-to-End Secure Chat Application: November 2017wigonahNo ratings yet
- Siemens Security Advisory Ssa-345442Document5 pagesSiemens Security Advisory Ssa-345442mc1256No ratings yet
- (V5812G) DataSheet ENDocument18 pages(V5812G) DataSheet ENVien Thong OnecomNo ratings yet
- Bigmarker Presenter Guide: Entering Your Live WebinarDocument2 pagesBigmarker Presenter Guide: Entering Your Live WebinarClyp BugzNo ratings yet
- Communications Systems - CCS CU Control UnitDocument3 pagesCommunications Systems - CCS CU Control UnitPrună Dumitru AdrianNo ratings yet
- 03ds 1645 EkinopsDocument4 pages03ds 1645 EkinopsYassine ChatouiNo ratings yet
- L&T Icl - 01Document1 pageL&T Icl - 01Structures ProductionNo ratings yet
- Spread-Spectrum Signals For Digital CommunicationsDocument51 pagesSpread-Spectrum Signals For Digital CommunicationsnandiniNo ratings yet
- 1 4981516856192926569Document3 pages1 4981516856192926569Gabriel RD0% (1)
- PRO CPE FDD Quick Installation Guide - 090113Document4 pagesPRO CPE FDD Quick Installation Guide - 090113Antipas Komi Mawuli AziawaNo ratings yet
- Live Human Being Detection Wireless Remote Controlled RobotDocument4 pagesLive Human Being Detection Wireless Remote Controlled RobotnaveenNo ratings yet
- What Is SMTP?: Plugin)Document2 pagesWhat Is SMTP?: Plugin)Nimish MadananNo ratings yet
- User Interface For SRSDocument11 pagesUser Interface For SRSPritiNo ratings yet
- Accord 308 Programming PDFDocument29 pagesAccord 308 Programming PDFShubham MoreNo ratings yet