You might also like
- Spectral Projected Gradient Methods: E. G. Birgin J. M. Mart Inez M. Raydan January 17, 2007Document14 pagesSpectral Projected Gradient Methods: E. G. Birgin J. M. Mart Inez M. Raydan January 17, 2007Muhd Izwan IshakNo ratings yet
- 4829 10842 1 PB - ScikDocument17 pages4829 10842 1 PB - ScikMaulana MalikNo ratings yet
- A Modified BFGS Method and Its Global Convergence in Nonconvex Minimization - 2001 - Journal of Computational and Applied MathematicsDocument21 pagesA Modified BFGS Method and Its Global Convergence in Nonconvex Minimization - 2001 - Journal of Computational and Applied MathematicsLorena Monterrosas PérezNo ratings yet
- Global Convergence of A FamilyDocument27 pagesGlobal Convergence of A FamilyRishi JhunjhunwalaNo ratings yet
- 07SQUJS-AK FinalMATH070213 PDFDocument12 pages07SQUJS-AK FinalMATH070213 PDFMistlemagicNo ratings yet
- RootDocument4 pagesRootd. r. o. a.No ratings yet
- Algorithms Process OptimizationDocument5 pagesAlgorithms Process OptimizationKakashi HatakeNo ratings yet
- Quasi Newton PDFDocument15 pagesQuasi Newton PDFSparrow JackNo ratings yet
- Quasi Newton PDFDocument15 pagesQuasi Newton PDFSparrow JackNo ratings yet
- CQG22Document23 pagesCQG22socorroNo ratings yet
- First Principles Calculations Within DFT: Some Practical ConcernsDocument21 pagesFirst Principles Calculations Within DFT: Some Practical ConcernsΙήήΘςέήτ βόγNo ratings yet
- tutorialKS PDFDocument7 pagestutorialKS PDFBubu BibuNo ratings yet
- Global Convergence of A Modified Fletcher-Reeves Conjugate Gradient Method With Armijo-Type Line Search - Zhang, Zhou (2006)Document12 pagesGlobal Convergence of A Modified Fletcher-Reeves Conjugate Gradient Method With Armijo-Type Line Search - Zhang, Zhou (2006)Emerson ButynNo ratings yet
- Initial Improvement of The Hybrid Accelerated Gradient Descent ProcessDocument8 pagesInitial Improvement of The Hybrid Accelerated Gradient Descent ProcessСтефан ПанићNo ratings yet
- Math 11143 Peer ReviewDocument16 pagesMath 11143 Peer Reviewbayu priyatnaNo ratings yet
- The DC Power Flow EquationsDocument22 pagesThe DC Power Flow EquationsPeter JumreNo ratings yet
- MD AlgoDocument13 pagesMD AlgoOscar Lazo MacedoNo ratings yet
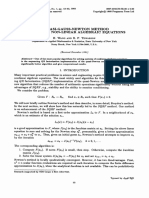
- A Quasi-Gauss-Newton Method For Solving Non-Linear Algebraic EquationsDocument11 pagesA Quasi-Gauss-Newton Method For Solving Non-Linear Algebraic EquationsMárcioBarbozaNo ratings yet
- Quasi Newton MethodsDocument15 pagesQuasi Newton MethodsPoornima NarayananNo ratings yet
- Systems of Nonlinear EquationsDocument27 pagesSystems of Nonlinear EquationsLucas SantosNo ratings yet
- Using Gradient Directions To Get Global Convergence of Neewton-Type MetodsDocument22 pagesUsing Gradient Directions To Get Global Convergence of Neewton-Type Metodsfilipgd1No ratings yet
- Second Order Method: Newton Method Quasi Newton MethodDocument11 pagesSecond Order Method: Newton Method Quasi Newton Methodindah_yantiNo ratings yet
- Lecture 12Document33 pagesLecture 12Jaafar AbbakarNo ratings yet
- Teoria Cuantica de Campos en Espacio Tiempo CurvoDocument13 pagesTeoria Cuantica de Campos en Espacio Tiempo CurvopveNo ratings yet
- Grey Markov TheoryDocument5 pagesGrey Markov TheoryAjeng Alfia Fadilla TeguhputriNo ratings yet
- JFG Full PaperDocument7 pagesJFG Full Papertejas9280No ratings yet
- Levenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden BerghenDocument4 pagesLevenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden Berghenseyed mohammadNo ratings yet
- Paramagnetic Ions: Brillouin Function and Curie LawDocument3 pagesParamagnetic Ions: Brillouin Function and Curie LawGohar Farooq VanceNo ratings yet
- DownloadDocument7 pagesDownloadnootsamNo ratings yet
- A Truncated Nonmonotone Gauss-Newton Method For Large-Scale Nonlinear Least-Squares ProblemsDocument16 pagesA Truncated Nonmonotone Gauss-Newton Method For Large-Scale Nonlinear Least-Squares ProblemsMárcioBarbozaNo ratings yet
- ZPC 1998 (Marked)Document25 pagesZPC 1998 (Marked)Noah MacKayNo ratings yet
- UnconstrainedOptimization VIIIDocument42 pagesUnconstrainedOptimization VIIIarvind kumarNo ratings yet
- Frank WolfeDocument25 pagesFrank Wolfesherlockholmes108No ratings yet
- Conditional Gradient (Frank-Wolfe) Method: Lecturer: Javier Pe Na Convex Optimization 10-725/36-725Document28 pagesConditional Gradient (Frank-Wolfe) Method: Lecturer: Javier Pe Na Convex Optimization 10-725/36-725Nguyễn Quang HuyNo ratings yet
- B-Spline Techniques For Volatility Modeling: To Cite This VersionDocument20 pagesB-Spline Techniques For Volatility Modeling: To Cite This VersionStephane MysonaNo ratings yet
- A Fast Modular Reduction MethodDocument12 pagesA Fast Modular Reduction MethodT TNo ratings yet
- Simulation On Cavitation Bubble Collapsing With LaDocument9 pagesSimulation On Cavitation Bubble Collapsing With LaHayderAlSamawiNo ratings yet
- Lecture 05 - Quasi Newthon MethodsDocument10 pagesLecture 05 - Quasi Newthon MethodsFanta CamaraNo ratings yet
- Unconstrained Minimization in R: Newton MethodsDocument5 pagesUnconstrained Minimization in R: Newton MethodsAbdesselem BoulkrouneNo ratings yet
- Shallow FoundationDocument56 pagesShallow FoundationLeo ChandraNo ratings yet
- 18 - A Property of The Modulo Operation in Number TheoryDocument2 pages18 - A Property of The Modulo Operation in Number TheoryUniversität BielefeldNo ratings yet
- Hauser Lecture2Document26 pagesHauser Lecture2simranlps1405No ratings yet
- Pages From 0205202-3Document1 pagePages From 0205202-3Cosmo FanaNo ratings yet
- PruebaDocument17 pagesPruebasocorroNo ratings yet
- Analysis of An Upwind Finite-Difference Scheme ForDocument9 pagesAnalysis of An Upwind Finite-Difference Scheme ForAndrés Felipe Vélez AcevedoNo ratings yet
- The Box-Jenkins MethodDocument14 pagesThe Box-Jenkins MethodAltaf KondakamaralaNo ratings yet
- CS 323 Computer Problem: Solution of Nonlinear Equations Due February 24, 2011Document3 pagesCS 323 Computer Problem: Solution of Nonlinear Equations Due February 24, 2011bhaumik89No ratings yet
- Numerical Method For The Compton Scattering OperatDocument34 pagesNumerical Method For The Compton Scattering OperatMohamed Fawzy ShrifNo ratings yet
- Fundamentals of Electromagnetics With Engineering Applications 1st Edition Wentworth Solutions ManualDocument38 pagesFundamentals of Electromagnetics With Engineering Applications 1st Edition Wentworth Solutions Manualshanerussellqe03lw100% (21)
- Electron Spin ResonanceDocument8 pagesElectron Spin Resonancejitendra kumar gurjarNo ratings yet
- Equation of State of Protoneutron Star With Trapped NeutrinosDocument6 pagesEquation of State of Protoneutron Star With Trapped NeutrinosJosé JiménezNo ratings yet
- Discontinuous Galerkin Methods For Periodic Boundary Value ProblemsDocument10 pagesDiscontinuous Galerkin Methods For Periodic Boundary Value ProblemsyhjfhwNo ratings yet
- Analysis 2Document11 pagesAnalysis 2LinaNo ratings yet
- The DC Power Flow EquationsDocument25 pagesThe DC Power Flow EquationsDaryAntoNo ratings yet
- Newton Algorithm For Unconstrained Optimization: October 21, 2008Document18 pagesNewton Algorithm For Unconstrained Optimization: October 21, 2008Samuel Alfonzo Gil BarcoNo ratings yet
- Proximal Gradient Descent: (And Acceleration)Document33 pagesProximal Gradient Descent: (And Acceleration)Saheli ChakrabortyNo ratings yet
- Week3 - Lecture5 - Filled2Document2 pagesWeek3 - Lecture5 - Filled2izmitliserhat4No ratings yet
- Edge Gyrokinetic Theory and Continuum Si PDFDocument19 pagesEdge Gyrokinetic Theory and Continuum Si PDFnabinNo ratings yet
- Linear Reg DemoDocument11 pagesLinear Reg DemovikasNo ratings yet
- Meeting Saved ChatDocument1 pageMeeting Saved ChatvikasNo ratings yet
- CGPDTM Patent Examiner (Preliminary) Exam Official Paper (Held On - 30 Sept, 2018)Document46 pagesCGPDTM Patent Examiner (Preliminary) Exam Official Paper (Held On - 30 Sept, 2018)vikasNo ratings yet
- Hist Am PDFDocument1 pageHist Am PDFvikasNo ratings yet
- Spark SQLDocument12 pagesSpark SQLvikasNo ratings yet
- ESE 19 Cut Off MarksDocument1 pageESE 19 Cut Off MarksvikasNo ratings yet
- Statistics Review 7: Correlation and Regression: Critical Care January 2004Document10 pagesStatistics Review 7: Correlation and Regression: Critical Care January 2004vikasNo ratings yet
- Elasticity: Elasticity Elasticity of Composites Viscoelasticity Elasticity of Crystals (Elastic Anisotropy)Document26 pagesElasticity: Elasticity Elasticity of Composites Viscoelasticity Elasticity of Crystals (Elastic Anisotropy)vikasNo ratings yet
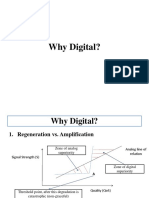
- Why DigitalDocument7 pagesWhy DigitalvikasNo ratings yet
- Statistics Review 7: Correlation and Regression: Critical Care January 2004Document10 pagesStatistics Review 7: Correlation and Regression: Critical Care January 2004vikasNo ratings yet
- Eclu DianDocument39 pagesEclu DianvikasNo ratings yet
- Temperature Conversion ChartDocument1 pageTemperature Conversion ChartvikasNo ratings yet
- Collaborative Filtering Matrix Factorization Approach: Jeff Howbert Introduction To Machine Learning Winter 2012 #Document30 pagesCollaborative Filtering Matrix Factorization Approach: Jeff Howbert Introduction To Machine Learning Winter 2012 #vikasNo ratings yet
- Dallas Tech Execs PresentationDocument20 pagesDallas Tech Execs PresentationvikasNo ratings yet
- Probability and Statistics (MMT-008) : Practical Assignment FileDocument48 pagesProbability and Statistics (MMT-008) : Practical Assignment FileAnurag GargNo ratings yet
- Syllabus MathsDocument4 pagesSyllabus MathsDeepta BasakNo ratings yet
- HW2 SolDocument2 pagesHW2 SolGuillermo AlemanNo ratings yet
- SHEETDocument43 pagesSHEETDileep Kumar RajuNo ratings yet
- HELM Workbook9 Vectors PDFDocument70 pagesHELM Workbook9 Vectors PDFMary Bena DuhaylungsodNo ratings yet
- FORTRAN77 Subroutine For Matrix InversionDocument2 pagesFORTRAN77 Subroutine For Matrix InversionSyeilendra Pramuditya100% (2)
- Lect 6Document20 pagesLect 6AmalAbdlFattahNo ratings yet
- Emag Chp2 ChartDocument1 pageEmag Chp2 Chartstripez xxNo ratings yet
- Implicit Simulations With Ls Dyna Introduction andDocument36 pagesImplicit Simulations With Ls Dyna Introduction andVirginija BortkevičienėNo ratings yet
- Linear Algebra and Differential Equations: Sartaj Ul HasanDocument10 pagesLinear Algebra and Differential Equations: Sartaj Ul HasanVijayNo ratings yet
- 1131 and 1141 Maple Exam Sample SolutionsDocument16 pages1131 and 1141 Maple Exam Sample Solutionsheyyheyyheyy100% (7)
- General CoordsDocument13 pagesGeneral CoordsMaci CostaNo ratings yet
- Che Ban-Calculus 2 - NVHDocument89 pagesChe Ban-Calculus 2 - NVHTiến DũngNo ratings yet
- Basic Math: 1.1 Scipy Constants (Scipy - Constants)Document32 pagesBasic Math: 1.1 Scipy Constants (Scipy - Constants)ops sksNo ratings yet
- Adjoint in Computational FinanceDocument24 pagesAdjoint in Computational Financerejishmar30No ratings yet
- Aqm Vector Op PDFDocument32 pagesAqm Vector Op PDFTudor PatuleanuNo ratings yet
- Mathematics For Machine LearningDocument52 pagesMathematics For Machine LearningVaibhav PathakNo ratings yet
- Essel Kofi Fosu - 3583418 - Comp Eng 3Document9 pagesEssel Kofi Fosu - 3583418 - Comp Eng 3Reagan TorbiNo ratings yet
- 16 - Leslie MatrixDocument44 pages16 - Leslie MatrixWendi IochNo ratings yet
- Curvilinear CoordinatesDocument18 pagesCurvilinear Coordinatesali_naghedifar100% (1)
- New Chapter 3 A Static of Rigid BodyDocument20 pagesNew Chapter 3 A Static of Rigid BodyjamaludinizzadNo ratings yet
- Advance Physics: Quarter 2 - Module 2: VectorsDocument26 pagesAdvance Physics: Quarter 2 - Module 2: VectorsMilcah Shane Niones SarenNo ratings yet
- Tutorial 1Document3 pagesTutorial 1Pravat Kumar SahooNo ratings yet
- Affine GeometryDocument60 pagesAffine GeometrySSNo ratings yet
- Rotations in 2 and 3 DimensionsDocument50 pagesRotations in 2 and 3 DimensionsJefferson Londoño CardosoNo ratings yet
- Matrix AlgebraDocument63 pagesMatrix AlgebraSagar DamaniNo ratings yet
- Dirac NotationDocument3 pagesDirac NotationJayaprabha KanaseNo ratings yet
- Complex Systems 535/physics 508: Homework 1Document2 pagesComplex Systems 535/physics 508: Homework 1Trevor feignarddNo ratings yet
- Problem 3.6: 3.9. Solved ProblemsDocument10 pagesProblem 3.6: 3.9. Solved ProblemsAbdul Shakoor ButtNo ratings yet