You might also like
- Open Y-Open Delta Configuration of Three Phase TransformersDocument17 pagesOpen Y-Open Delta Configuration of Three Phase TransformersShyam RatanNo ratings yet
- Optimization Problems 1Document12 pagesOptimization Problems 1AnjanNo ratings yet
- 45 5655 EE422 2016 1 1 1 Open Delta Transformers ConnectionDocument1 page45 5655 EE422 2016 1 1 1 Open Delta Transformers ConnectionAnjanNo ratings yet
- Ipa SYLLABUSDocument110 pagesIpa SYLLABUSAnjanNo ratings yet
- Trainingcalendar 15 PDFDocument16 pagesTrainingcalendar 15 PDFAnjanNo ratings yet
- 12.manufacturing and AssemblyDocument10 pages12.manufacturing and AssemblyAnjanNo ratings yet
- AD-783 840 A Hysteresigraph For Plotting Magneti-Zation Curves Reinhold W. Kubach Dayton UniversityDocument51 pagesAD-783 840 A Hysteresigraph For Plotting Magneti-Zation Curves Reinhold W. Kubach Dayton UniversityAnjanNo ratings yet
- AUTOMATION TITLEDocument8 pagesAUTOMATION TITLEAnjanNo ratings yet
- ELECTRICAL Engineering Interview Questions With AnswersDocument16 pagesELECTRICAL Engineering Interview Questions With AnswersAnonymous YuZX1Ot3No ratings yet
- 5.windings and InsulationDocument30 pages5.windings and InsulationAnjanNo ratings yet
- 4.magnetic CircuitDocument25 pages4.magnetic CircuitAnjanNo ratings yet
- 1 IntroductionDocument6 pages1 IntroductionAnjanNo ratings yet
- High-Impedance Fault Detection in The Distribution Network Using The Time-Frequency-Based AlgorithmDocument9 pagesHigh-Impedance Fault Detection in The Distribution Network Using The Time-Frequency-Based AlgorithmAnjanNo ratings yet
- Motion and Vector Control PDFDocument0 pagesMotion and Vector Control PDFbnn123No ratings yet
- GATE EE Vol-1 by KanodiaDocument53 pagesGATE EE Vol-1 by Kanodiavigneshnrynn67% (3)
- Eg1103 PDFDocument222 pagesEg1103 PDFAnjanNo ratings yet
- 1 s2.0 S014206151500215X MainDocument8 pages1 s2.0 S014206151500215X MainAnjanNo ratings yet
- Syllabus:Network Theory (3-1-0)Document82 pagesSyllabus:Network Theory (3-1-0)Hassan SayedNo ratings yet
- WWW Manaresults Co inDocument1 pageWWW Manaresults Co inAnjanNo ratings yet
- 1 s2.0 S0142061513001452 MainDocument6 pages1 s2.0 S0142061513001452 MainAnjanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Step by Step Guide To Become Big Data DeveloperDocument15 pagesStep by Step Guide To Become Big Data DeveloperSaggam Bharath75% (4)
- Composite Beams Columns To Eurocode 4Document155 pagesComposite Beams Columns To Eurocode 4Jevgenijs Kolupajevs100% (1)
- Carestation 650 Brochure PDFDocument12 pagesCarestation 650 Brochure PDFzulfiah100% (1)
- George Salvan Architectural Utilities 2 Electrical and Mechanical Equipment PDFDocument434 pagesGeorge Salvan Architectural Utilities 2 Electrical and Mechanical Equipment PDFclainNo ratings yet
- Tarea 1Document4 pagesTarea 1Felipe López GarduzaNo ratings yet
- Procedure System of Plant & Equipment ManagementDocument19 pagesProcedure System of Plant & Equipment ManagementImtiyaz Akhtar100% (1)
- Parallel Line Method PDFDocument80 pagesParallel Line Method PDFalbertNo ratings yet
- Champ Gyro User Guide Rev4.1Document33 pagesChamp Gyro User Guide Rev4.1Vicente AguirreNo ratings yet
- W101 V2 Ebook 0831Document37 pagesW101 V2 Ebook 0831papagajkoNo ratings yet
- Technical Solutions For The Installation of High Voltage CablesDocument13 pagesTechnical Solutions For The Installation of High Voltage Cablesrrazak63No ratings yet
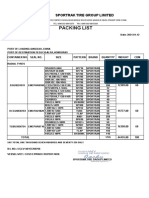
- Packing List: Sportrak Tire Group LimitedDocument1 pagePacking List: Sportrak Tire Group Limitedissa lamarNo ratings yet
- Catalogue - Hilux - 2021 (1) - 0Document6 pagesCatalogue - Hilux - 2021 (1) - 0Hermawan AnggraeniNo ratings yet
- Choke SlideDocument23 pagesChoke SlideCharles Adefemi Omowole100% (1)
- Mechanical Engineering Mechanical Engineering: Core Courses Core CoursesDocument1 pageMechanical Engineering Mechanical Engineering: Core Courses Core CoursesAhsen ZubairNo ratings yet
- Vlsi PaperDocument4 pagesVlsi PaperArul RajNo ratings yet
- Frame Generator PDFDocument13 pagesFrame Generator PDFWilly PeralesNo ratings yet
- Check Valve VickersDocument15 pagesCheck Valve Vickersعلي عائشة100% (1)
- Quartz Analogue Watches User Manual: Display and FunctionsDocument3 pagesQuartz Analogue Watches User Manual: Display and FunctionsFlorin MihaiNo ratings yet
- 2nd Quarter Week 3 Parallel CircuitDocument12 pages2nd Quarter Week 3 Parallel CircuitjNo ratings yet
- Wind Turbine Design ProjectDocument4 pagesWind Turbine Design ProjectPushpa Mohan RajNo ratings yet
- SmarAct Vacuum Options V3bDocument8 pagesSmarAct Vacuum Options V3bnayakr1127No ratings yet
- Goat Milking Stand Plans PDFDocument6 pagesGoat Milking Stand Plans PDFcowboyNo ratings yet
- CV - Teguh Agung Kusuma - COC I - Chief Mate - AHTS, Survey, AWBDocument7 pagesCV - Teguh Agung Kusuma - COC I - Chief Mate - AHTS, Survey, AWBTeguh Agung KusumaNo ratings yet
- Vintage Airplane - May 1990Document36 pagesVintage Airplane - May 1990Aviation/Space History Library100% (1)
- Ae603 PS 3Document3 pagesAe603 PS 3JohnNo ratings yet
- Torsion of SectionsDocument3 pagesTorsion of SectionsanilmaviNo ratings yet
- Isis Manual Vol. 2Document168 pagesIsis Manual Vol. 2Νίκος ΚατριβέσηςNo ratings yet
- Project: Inventory Management System For Music Store: SynopsisDocument7 pagesProject: Inventory Management System For Music Store: SynopsisSoumitra ChakravartyNo ratings yet
- OXIDATIONDocument36 pagesOXIDATIONMansab AliNo ratings yet
- Teaching Guide 2Document172 pagesTeaching Guide 2Floura Sparks100% (1)