You might also like
- Quartile1 PDFDocument2 pagesQuartile1 PDFHanifah Edres DalumaNo ratings yet
- Dharmakirti39s Commentary On ChakrasamvaraDocument15 pagesDharmakirti39s Commentary On ChakrasamvaraThiago AlbuquerqueNo ratings yet
- Lec 25Document11 pagesLec 25juneedyawarNo ratings yet
- Lec 28Document24 pagesLec 28Win Alfalah NasutionNo ratings yet
- IntroductionDocument26 pagesIntroductionAhmet A. YurttadurNo ratings yet
- Lec 1Document26 pagesLec 1Win Alfalah NasutionNo ratings yet
- Introduction To SignalsDocument13 pagesIntroduction To SignalsJohnny MessiahNo ratings yet
- Lec 22Document13 pagesLec 22Jamvanti PandeyNo ratings yet
- Lec 21Document19 pagesLec 21M Chandan ShankarNo ratings yet
- Dynamics of Machines Prof - Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument16 pagesDynamics of Machines Prof - Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurIshu GoelNo ratings yet
- Lec 33Document16 pagesLec 33Win Alfalah NasutionNo ratings yet
- Fourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Document4 pagesFourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Fadi Awni EleiwiNo ratings yet
- Lec 17Document12 pagesLec 17RUCHIRA KUMAR PRADHANNo ratings yet
- Networks and Systems Profvgkmurti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 03 Introductory ConceptsDocument22 pagesNetworks and Systems Profvgkmurti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 03 Introductory ConceptsSharath MunduriNo ratings yet
- Lead and LagDocument13 pagesLead and LagLikhithNo ratings yet
- Lec 23Document18 pagesLec 23Win Alfalah NasutionNo ratings yet
- Lec 6Document19 pagesLec 6veermataNo ratings yet
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 3 Dynamics of SDOF StructureDocument19 pagesStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 3 Dynamics of SDOF StructureMahesh Kumar sukhadiyaNo ratings yet
- Lec 29Document23 pagesLec 29Win Alfalah NasutionNo ratings yet
- Lec 11Document9 pagesLec 11Government Polytechnic Gulzarbagh Patna 7No ratings yet
- Pulse Load Response Characteristics and Impulse LoadingDocument17 pagesPulse Load Response Characteristics and Impulse LoadingDarsHan MoHanNo ratings yet
- PS1Document25 pagesPS1tharunNo ratings yet
- PerturbationDocument16 pagesPerturbationandrew9180No ratings yet
- Motivation For Fourier SeriesDocument18 pagesMotivation For Fourier Serieshamza abdo mohamoudNo ratings yet
- Lec 16Document21 pagesLec 16AnshuMan SharmaNo ratings yet
- Computing Fourier Series and Power Spectrum With MATLAB - Brian D. Storey PDFDocument15 pagesComputing Fourier Series and Power Spectrum With MATLAB - Brian D. Storey PDFmikelotingaNo ratings yet
- 04 Aneesh Malhotra ReportDocument13 pages04 Aneesh Malhotra ReportAneesh MalhotraNo ratings yet
- Lec 22Document13 pagesLec 22Ravinder Reddy SimalaNo ratings yet
- Euler's Method: Dy Yt y Fty DT F (T, Y) F FDocument9 pagesEuler's Method: Dy Yt y Fty DT F (T, Y) F Fالزهور لخدمات الانترنيتNo ratings yet
- Keywords: Deterministic and Random Signals, Even and Odd SignalsDocument14 pagesKeywords: Deterministic and Random Signals, Even and Odd Signalsbsnl007No ratings yet
- LaplaceTransform and System StabilityDocument30 pagesLaplaceTransform and System Stabilityhamza abdo mohamoudNo ratings yet
- Lec 39Document32 pagesLec 39Sueja MalligwadNo ratings yet
- Lec 7Document23 pagesLec 7Mukund ShahNo ratings yet
- Lec19 3 PDFDocument6 pagesLec19 3 PDFDharmendra JainNo ratings yet
- Lec 32Document16 pagesLec 32salimNo ratings yet
- Digital Communication Prof. Bikash Kumar Dey Department of Electrical Engineering Indian Institute of Technology Bombay Lecture - 25 EqualizersDocument18 pagesDigital Communication Prof. Bikash Kumar Dey Department of Electrical Engineering Indian Institute of Technology Bombay Lecture - 25 EqualizersSharath MunduriNo ratings yet
- 1 Error Analysis For Solving IVP: Lecture 25: Numerical Solution of Differential Equations - Error AnalysisDocument5 pages1 Error Analysis For Solving IVP: Lecture 25: Numerical Solution of Differential Equations - Error AnalysisGeorge HansenNo ratings yet
- Signals PDFDocument6 pagesSignals PDFFuture EngineerNo ratings yet
- Lec26 3 PDFDocument8 pagesLec26 3 PDFDharmendra JainNo ratings yet
- Headsoln Master MethodDocument6 pagesHeadsoln Master MethodSumit DeyNo ratings yet
- Linear System Modeling A Single Degree of Freedom OscillatorDocument23 pagesLinear System Modeling A Single Degree of Freedom OscillatorCristian AnghelNo ratings yet
- EECE 301 Note Set 30 CT System StabilityDocument30 pagesEECE 301 Note Set 30 CT System StabilityrodriguesvascoNo ratings yet
- Lec 22Document19 pagesLec 22ajayroy12No ratings yet
- MyDocument12 pagesMyK. ogareNo ratings yet
- What Is The Difference Between The Fourier Series and The Taylor SeriesDocument2 pagesWhat Is The Difference Between The Fourier Series and The Taylor SeriesUmer Saeed0% (1)
- Lec 5Document24 pagesLec 5PRAKASH K MNo ratings yet
- MITOCW - MITRES - 6-007s11lec03 - 300k.mp4: ProfessorDocument16 pagesMITOCW - MITRES - 6-007s11lec03 - 300k.mp4: ProfessorsivatejamundlamuriNo ratings yet
- Lec 10Document15 pagesLec 10rajNo ratings yet
- Levarge - Semigroup of Linear OperatorsDocument17 pagesLevarge - Semigroup of Linear OperatorsCristian ValdezNo ratings yet
- Delta Function and So OnDocument20 pagesDelta Function and So OnLionel TopperNo ratings yet
- Keywords: Linear Systems, Additivity Property and Homogeneity Property, TimeDocument13 pagesKeywords: Linear Systems, Additivity Property and Homogeneity Property, Timebsnl007No ratings yet
- Lec 55Document12 pagesLec 55desanchezeNo ratings yet
- Log LinearizationDocument5 pagesLog LinearizationotternamedsteveNo ratings yet
- Lec1 PDFDocument22 pagesLec1 PDFsuntararaajanNo ratings yet
- Ivp PDFDocument61 pagesIvp PDF王子昱No ratings yet
- Identityproblem 1Document3 pagesIdentityproblem 1api-255492396No ratings yet
- Control Systems Time Response Analysis: TR SsDocument6 pagesControl Systems Time Response Analysis: TR Ssmohammed zaidNo ratings yet
- Lec 26Document26 pagesLec 26Win Alfalah NasutionNo ratings yet
- Lec 2Document45 pagesLec 2RaviNo ratings yet
- Inverse and Logarithmic FunctionsDocument28 pagesInverse and Logarithmic FunctionsNomhleNo ratings yet
- Stability Analysis of Feedback SystemsDocument28 pagesStability Analysis of Feedback SystemsphmferreiraNo ratings yet
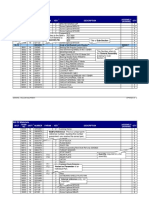
- Appendix C Steam TablesDocument8 pagesAppendix C Steam TablesWin Alfalah Nasution100% (1)
- Do Rankings Reflect Research Quality References 2 of 4Document3 pagesDo Rankings Reflect Research Quality References 2 of 4Win Alfalah NasutionNo ratings yet
- Lect 3Document2 pagesLect 3Win Alfalah NasutionNo ratings yet
- Combined Cycle Etc LiteraturesDocument1 pageCombined Cycle Etc LiteraturesWin Alfalah NasutionNo ratings yet
- Lect3 PDFDocument40 pagesLect3 PDFWin Alfalah NasutionNo ratings yet
- Do Rankings Reflect Research Quality References 1 of 4 PDFDocument3 pagesDo Rankings Reflect Research Quality References 1 of 4 PDFWin Alfalah NasutionNo ratings yet
- Nonlinear Systems and Control: Outline Topic No. of Lectures Textbook SectionDocument2 pagesNonlinear Systems and Control: Outline Topic No. of Lectures Textbook SectionMustafa KösemNo ratings yet
- Red Alert 2 Serial NumberDocument1 pageRed Alert 2 Serial NumberWin Alfalah NasutionNo ratings yet
- Lyapunov Stability 2Document2 pagesLyapunov Stability 2Win Alfalah NasutionNo ratings yet
- Red Alert 2 Serial NumberDocument1 pageRed Alert 2 Serial NumberWin Alfalah NasutionNo ratings yet
- Lec 15Document19 pagesLec 15Win Alfalah NasutionNo ratings yet
- Red Alert 2 S NDocument1 pageRed Alert 2 S NWin Alfalah NasutionNo ratings yet
- Lyapunov StabilityDocument5 pagesLyapunov StabilityWin Alfalah NasutionNo ratings yet
- Nonlinear Lect7Document13 pagesNonlinear Lect7Win Alfalah NasutionNo ratings yet
- Nonlinear Lect6Document16 pagesNonlinear Lect6win alfalahNo ratings yet
- 18 Variable Structure ControlDocument61 pages18 Variable Structure ControlWin Alfalah NasutionNo ratings yet
- Chapter 2 CarburetorDocument20 pagesChapter 2 CarburetorNavlesh Sharma100% (1)
- Cooling TowersDocument7 pagesCooling TowersWin Alfalah NasutionNo ratings yet
- Cooling Tower IITDDocument32 pagesCooling Tower IITDsnehangshu06No ratings yet
- Nonlinear Lect8Document14 pagesNonlinear Lect8Win Alfalah NasutionNo ratings yet
- Nonlinear Lect9Document13 pagesNonlinear Lect9Win Alfalah NasutionNo ratings yet
- Nonlinear Lect10Document14 pagesNonlinear Lect10Win Alfalah NasutionNo ratings yet
- Lec 29Document23 pagesLec 29Win Alfalah NasutionNo ratings yet
- Lec 7Document35 pagesLec 7Win Alfalah NasutionNo ratings yet
- Lec 35Document18 pagesLec 35Win Alfalah NasutionNo ratings yet
- Lec 34Document23 pagesLec 34Win Alfalah NasutionNo ratings yet
- Lec 3Document29 pagesLec 3Win Alfalah NasutionNo ratings yet
- Lec 3Document29 pagesLec 3Win Alfalah NasutionNo ratings yet
- Armadio Presentation-2019Document45 pagesArmadio Presentation-2019Subhash Singh TomarNo ratings yet
- Medical GeneticsDocument4 pagesMedical GeneticsCpopNo ratings yet
- 8-General Rules For Erection ProcedureDocument4 pages8-General Rules For Erection ProcedurePrijin UnnunnyNo ratings yet
- Crma Unit 1 Crma RolesDocument34 pagesCrma Unit 1 Crma Rolesumop3plsdn0% (1)
- Segmentation of Blood Vessels Using Rule-Based and Machine-Learning-Based Methods: A ReviewDocument10 pagesSegmentation of Blood Vessels Using Rule-Based and Machine-Learning-Based Methods: A ReviewRainata PutraNo ratings yet
- Gondola CalculationDocument6 pagesGondola CalculationBudi SusantoNo ratings yet
- Designing and Building A Computer TableDocument9 pagesDesigning and Building A Computer Tablemaster_codersNo ratings yet
- Chillers VoltasDocument4 pagesChillers Voltasanil shuklaNo ratings yet
- Maintenance Páginas-509-580Document72 pagesMaintenance Páginas-509-580Alexandra Gabriela Pacheco PrietoNo ratings yet
- 331-10 331 Operators Manual enDocument12 pages331-10 331 Operators Manual enYahir VidalNo ratings yet
- Solar Charge Controller: Solar Car Solar Home Solar Backpack Solar Boat Solar Street Light Solar Power GeneratorDocument4 pagesSolar Charge Controller: Solar Car Solar Home Solar Backpack Solar Boat Solar Street Light Solar Power Generatorluis fernandoNo ratings yet
- Skincare Routine Order Cheat SheetDocument10 pagesSkincare Routine Order Cheat SheetYel Salenga100% (3)
- Recruitment and Selection in Canada 7Th by Catano Wiesner Full ChapterDocument22 pagesRecruitment and Selection in Canada 7Th by Catano Wiesner Full Chaptermary.jauregui841100% (51)
- Coffee Quality Manual by Abra Rand Nig Use IDocument25 pagesCoffee Quality Manual by Abra Rand Nig Use IIpungNo ratings yet
- Hevi-Bar II and Safe-Lec 2Document68 pagesHevi-Bar II and Safe-Lec 2elkabongscribdNo ratings yet
- Pusheen With Donut: Light Grey, Dark Grey, Brown, RoséDocument13 pagesPusheen With Donut: Light Grey, Dark Grey, Brown, RosémafaldasNo ratings yet
- Aquaculture Scoop May IssueDocument20 pagesAquaculture Scoop May IssueAquaculture ScoopNo ratings yet
- Ecological Quality RatioDocument24 pagesEcological Quality RatiofoocheehungNo ratings yet
- Times Square C2C Cardigan: Finished Measurements NotionsDocument8 pagesTimes Square C2C Cardigan: Finished Measurements Notionsdiana.alyNo ratings yet
- The Working of KarmaDocument74 pagesThe Working of KarmaSuhas KulhalliNo ratings yet
- Project ReportDocument14 pagesProject ReportNoah100% (7)
- Petersen Coils Basic 20principle and ApplicationDocument3 pagesPetersen Coils Basic 20principle and ApplicationasotozuazuaNo ratings yet
- Bulk Material/Part Ppap Process Checklist / Approval: Required?Document32 pagesBulk Material/Part Ppap Process Checklist / Approval: Required?krds chidNo ratings yet
- Scholomance 1 GravitonDocument18 pagesScholomance 1 GravitonFabiano SaccolNo ratings yet
- Azure Machine Learning StudioDocument17 pagesAzure Machine Learning StudioNurain IsmailNo ratings yet
- Gujral FCMDocument102 pagesGujral FCMcandiddreamsNo ratings yet
- Adriano Costa Sampaio: Electrical EngineerDocument3 pagesAdriano Costa Sampaio: Electrical EngineeradrianorexNo ratings yet
- Multi Pressure Refrigeration CyclesDocument41 pagesMulti Pressure Refrigeration CyclesSyed Wajih Ul Hassan80% (10)