You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Wave Equations SolverDocument14 pagesWave Equations SolverWilson LimNo ratings yet
- Solving rational equations and inequalitiesDocument2 pagesSolving rational equations and inequalitiesjessa spNo ratings yet
- Homework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016Document2 pagesHomework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016ranvNo ratings yet
- Laminar Flow in a T-Junction PipeDocument5 pagesLaminar Flow in a T-Junction PipeVempati ShriramNo ratings yet
- Assign4 PDFDocument1 pageAssign4 PDFAkhlaq HusainNo ratings yet
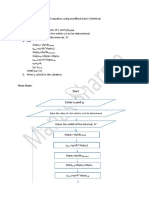
- Aim: To Solve A Differential Equation Using Modified Euler's Method. AlgorithmDocument4 pagesAim: To Solve A Differential Equation Using Modified Euler's Method. AlgorithmALEXANDER ROSARIO ACEVEDONo ratings yet
- Unit - 5-DMDocument24 pagesUnit - 5-DMsamharisson1986No ratings yet
- Class 10 CBSE (Linear Equation in One Variable)Document13 pagesClass 10 CBSE (Linear Equation in One Variable)HoneyNo ratings yet
- A Note On The Equation (X + y + Z) Xyz: Titu AndreescuDocument6 pagesA Note On The Equation (X + y + Z) Xyz: Titu Andreescuahmed_lovely92No ratings yet
- Unit 2 CST Review InequalitiesDocument2 pagesUnit 2 CST Review InequalitiesMisterLemusNo ratings yet
- Chapter 2 Ca Test SeriesDocument6 pagesChapter 2 Ca Test Seriesajaykushwah1171No ratings yet
- Hydrodynamic Stability Concepts and Burgers EquationDocument35 pagesHydrodynamic Stability Concepts and Burgers EquationJose Alejandro ListaNo ratings yet
- Finding General Solutions to Linear Differential Equations Using Reduction of OrderDocument14 pagesFinding General Solutions to Linear Differential Equations Using Reduction of Ordercheema010No ratings yet
- Ishan Paper 2 2 ChaptersDocument2 pagesIshan Paper 2 2 ChaptersSANKET MEHTANo ratings yet
- Experiment No. 13: X+3y 2z 0 2x Y+4z 0 X 11y+14z 0Document7 pagesExperiment No. 13: X+3y 2z 0 2x Y+4z 0 X 11y+14z 0deepNo ratings yet
- Maths questions on quadratic equationsDocument4 pagesMaths questions on quadratic equationsbadisa booksNo ratings yet
- Review For Mastery: VocabularyDocument3 pagesReview For Mastery: VocabularyHala EidNo ratings yet
- Algebra - Equations.solving Linear Equations (C) .USDocument1 pageAlgebra - Equations.solving Linear Equations (C) .USNur IffahaniNo ratings yet
- Unit 4: Taylor Series MethodDocument5 pagesUnit 4: Taylor Series MethodPavanNo ratings yet
- FEM Introduction to 2D Shape FunctionsDocument6 pagesFEM Introduction to 2D Shape FunctionsHomer Texido FrangioniNo ratings yet
- JHBVGV 656Document6 pagesJHBVGV 656Luis MancillaNo ratings yet
- Implicit DifferentiationDocument11 pagesImplicit DifferentiationAna Marie ValenzuelaNo ratings yet
- Boundary Value Problems: Second Order BVPDocument4 pagesBoundary Value Problems: Second Order BVPmakfirsefaNo ratings yet
- Beeman's AlgorithmDocument4 pagesBeeman's Algorithmvisamarinas6226No ratings yet
- Newmark-Beta Method - Wikipedia, The Free EncyclopediaDocument2 pagesNewmark-Beta Method - Wikipedia, The Free Encyclopediamohamadiqbalbadli_mibNo ratings yet
- Differential Equations One Shot #BounceBackDocument131 pagesDifferential Equations One Shot #BounceBackAkash Adak100% (2)
- Advanced Engineering Mathematics 3rd Edition PDFDocument775 pagesAdvanced Engineering Mathematics 3rd Edition PDFLeangHeySeyNo ratings yet
- Existence and Uniqueness of Solution To Odes: Lipschitz ContinuityDocument17 pagesExistence and Uniqueness of Solution To Odes: Lipschitz ContinuityKiranKumar S VNo ratings yet
- Lab ReportDocument6 pagesLab Report'Izzad AfifNo ratings yet
- Ma7102 Advanced Numerical Methods L T P CDocument2 pagesMa7102 Advanced Numerical Methods L T P Cramyaranganayaki0% (1)