You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- qms17 7sDocument9 pagesqms17 7sMarisol Hernández SánchezNo ratings yet
- Transmission Line Write UpDocument10 pagesTransmission Line Write UpAbhishek AgrawalNo ratings yet
- BesselfunctDocument12 pagesBesselfunctFarid AkhtarNo ratings yet
- ODEs Handout Complete 2 To A PageDocument20 pagesODEs Handout Complete 2 To A PageRishNo ratings yet
- MA1512 TUTORIAL 5 SOLUTIONSDocument7 pagesMA1512 TUTORIAL 5 SOLUTIONSWeiyen NgNo ratings yet
- MA3264CHAP7Document67 pagesMA3264CHAP7Nancy QNo ratings yet
- ODEs-Regular SingularitiesDocument21 pagesODEs-Regular SingularitiesJean DebarrosNo ratings yet
- 1 Lorentz Invariance and QM: 1 dX (τ) dτ dX (τ) dτ 0Document5 pages1 Lorentz Invariance and QM: 1 dX (τ) dτ dX (τ) dτ 0joshua7312No ratings yet
- Chapter 3 - First-Order Differential EquationsDocument76 pagesChapter 3 - First-Order Differential EquationsLong NguyễnNo ratings yet
- Liapunov's Second MethodDocument6 pagesLiapunov's Second Methodsalim100% (1)
- Physics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Document12 pagesPhysics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Ali RazaNo ratings yet
- On Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorsDocument12 pagesOn Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorshungkgNo ratings yet
- The Lorentz Group and Relativistic PhysicsDocument9 pagesThe Lorentz Group and Relativistic PhysicsLivanos BloestNo ratings yet
- Derive WKB PDFDocument2 pagesDerive WKB PDFtjny699No ratings yet
- Adient and DivergenceDocument6 pagesAdient and DivergenceBipanjit SinghNo ratings yet
- Wave scattering by small bodies of arbitrary shapesDocument11 pagesWave scattering by small bodies of arbitrary shapesMohammad Imran ShafiNo ratings yet
- 07 - Telegrapher EquationDocument9 pages07 - Telegrapher EquationSaddam HusainNo ratings yet
- Constraints and Lagrange MultipliersDocument7 pagesConstraints and Lagrange MultipliersAwais YousafNo ratings yet
- BaristocranaDocument3 pagesBaristocranajonnathan_andreNo ratings yet
- Homework For Math 6410 1, Fall 2013: Andrejs Treibergs, Instructor December 9, 2013Document14 pagesHomework For Math 6410 1, Fall 2013: Andrejs Treibergs, Instructor December 9, 2013Rodrigo KostaNo ratings yet
- Spring 2005 SolutionsDocument11 pagesSpring 2005 SolutionsÖzge TüncelNo ratings yet
- 1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Document4 pages1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Christopher BellNo ratings yet
- Topic 2Document9 pagesTopic 2HENRY ZULUNo ratings yet
- International Journal of Pure and Applied Mathematics No. 1 2012, 17-27Document12 pagesInternational Journal of Pure and Applied Mathematics No. 1 2012, 17-27boris laraNo ratings yet
- Existence Andglobal Stability of Traveling Curved Fronts in The Allen-Cahn EquationsDocument30 pagesExistence Andglobal Stability of Traveling Curved Fronts in The Allen-Cahn EquationsLuis FuentesNo ratings yet
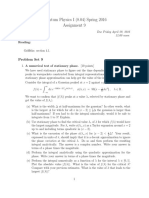
- Quantum Physics I (8.04) Spring 2016 Assignment 9: Problem Set 9Document5 pagesQuantum Physics I (8.04) Spring 2016 Assignment 9: Problem Set 9Fabian M Vargas FontalvoNo ratings yet
- Physics 2. Electromagnetism Lecture 1Document9 pagesPhysics 2. Electromagnetism Lecture 1Osama HassanNo ratings yet
- VIP and CP S Nanda (Me)Document26 pagesVIP and CP S Nanda (Me)SIDDHARTH MITRANo ratings yet
- Presentation Draft FMEFMDocument27 pagesPresentation Draft FMEFMDavid SaccoNo ratings yet
- Diff Eq FormulasDocument10 pagesDiff Eq Formulasroi_marketingNo ratings yet
- Fractional SCHR Odinger Wave Equation and Fractional Uncertainty PrincipleDocument8 pagesFractional SCHR Odinger Wave Equation and Fractional Uncertainty PrincipleCristian CasaNo ratings yet
- SLE AT2003preprintDocument12 pagesSLE AT2003preprintHuong Cam ThuyNo ratings yet
- What's Important: Time-Independent Schrödinger EquationDocument5 pagesWhat's Important: Time-Independent Schrödinger Equationombraga1896No ratings yet
- The Heat and Wave Equations in 2D and 3DDocument39 pagesThe Heat and Wave Equations in 2D and 3DDavid PatricioNo ratings yet
- Space Curve GeometryDocument20 pagesSpace Curve GeometryMANIRAGUHA Jean PaulNo ratings yet
- Solving Wave EquationDocument10 pagesSolving Wave Equationdanielpinheiro07No ratings yet
- Special FunDocument10 pagesSpecial FunJHNo ratings yet
- Chapter 4 PDEDocument17 pagesChapter 4 PDEHui JingNo ratings yet
- AEM 3e Chapter 13Document24 pagesAEM 3e Chapter 13AKIN ERENNo ratings yet
- Exact Solutions of The Space-Time Fractional EqualDocument7 pagesExact Solutions of The Space-Time Fractional EqualAreesha NoorNo ratings yet
- 5.1. Derivation of The Wave EquationDocument21 pages5.1. Derivation of The Wave EquationAlejandro RodriguezNo ratings yet
- RHO Periodic PDFDocument4 pagesRHO Periodic PDFPrabhat NarangNo ratings yet
- 7 On Partial Differential EquationsDocument7 pages7 On Partial Differential EquationsShreyaSharmaNo ratings yet
- Olver PDE Student Solutions ManualDocument63 pagesOlver PDE Student Solutions ManualKhaled Tamimy50% (2)
- GaugeDocument4 pagesGaugemaplebrandishNo ratings yet
- Triple Int16 8Document7 pagesTriple Int16 8Nikoli MajorNo ratings yet
- Lecture16 OSCILLATIONS 2Document3 pagesLecture16 OSCILLATIONS 2huzaifaalyanhfNo ratings yet
- Journal of Computational and Applied Mathematics: D. Nazari, S. ShahmoradDocument9 pagesJournal of Computational and Applied Mathematics: D. Nazari, S. ShahmoradamonateeyNo ratings yet
- Illinois Econ 536 Dynamic Demand ModelsDocument7 pagesIllinois Econ 536 Dynamic Demand ModelsMaria RoaNo ratings yet
- Lecture DMDocument11 pagesLecture DMHarsh SharmaNo ratings yet
- Note7 8Document17 pagesNote7 8Nancy QNo ratings yet
- Integral Transforms: Richard Earl (Edited, and Chapter 6 Added, by Sam Howison) Hilary Term 2019Document58 pagesIntegral Transforms: Richard Earl (Edited, and Chapter 6 Added, by Sam Howison) Hilary Term 2019EDU CIPANANo ratings yet
- Linear Viscoelasticity: 5.1 Model EquationsDocument16 pagesLinear Viscoelasticity: 5.1 Model Equationsapi-3733260No ratings yet
- Chapter 7Document29 pagesChapter 7Vito LiuNo ratings yet
- HOMEWORK 6 SOLUTIONSDocument5 pagesHOMEWORK 6 SOLUTIONSSwathi BDNo ratings yet
- 1 Exercise: 1-D Heat Conduction With Finite ElementsDocument10 pages1 Exercise: 1-D Heat Conduction With Finite ElementsAhmed Ijaz AbdullaNo ratings yet
- Cylindrical SOVDocument9 pagesCylindrical SOVAlex StevensonNo ratings yet
- Chap 8 eDocument19 pagesChap 8 evenuNo ratings yet
- IIT-JEE Advanced Revision Package: Physical ChemistryDocument172 pagesIIT-JEE Advanced Revision Package: Physical ChemistryprathamNo ratings yet
- IPMSM control using MTPA based adaptive fractional sliding modeDocument13 pagesIPMSM control using MTPA based adaptive fractional sliding modeKev NgoNo ratings yet
- Test Based On Electric DipoleDocument5 pagesTest Based On Electric DipoleKunal MukherjeeNo ratings yet
- WP Dealing With Water Surge in Fire Protection Piping Systems 2018Document16 pagesWP Dealing With Water Surge in Fire Protection Piping Systems 2018Ahmed AlmaghrbyNo ratings yet
- Second Set of Slides Notes PDFDocument23 pagesSecond Set of Slides Notes PDFJustina MweendiNo ratings yet
- Zhang 2017Document12 pagesZhang 2017Maki SrbijaNo ratings yet
- L1b - (Live) Introduction - Print-1Document20 pagesL1b - (Live) Introduction - Print-1GGNo ratings yet
- The Study L’école Internationale - Units and Measurement AssignmentDocument6 pagesThe Study L’école Internationale - Units and Measurement Assignmentdhivya shreeNo ratings yet
- Midterm Answer Bio MechanicsDocument11 pagesMidterm Answer Bio MechanicsUmmu HauraNo ratings yet
- SOLUTION OF Lens, Mirror, RefractionDocument4 pagesSOLUTION OF Lens, Mirror, RefractionRumpa DasNo ratings yet
- MTH108 Courseoutline F2023Document7 pagesMTH108 Courseoutline F2023ahmeddhillon1No ratings yet
- ESci 110 - N046 - Lesson 7.3 AssessmentDocument6 pagesESci 110 - N046 - Lesson 7.3 AssessmentIvy PerezNo ratings yet
- Beat Phenomenon - Vibration - Sys. Analys.Document5 pagesBeat Phenomenon - Vibration - Sys. Analys.Miguel CervantesNo ratings yet
- Maths S1 SBDocument252 pagesMaths S1 SBGAKWAYA AubinNo ratings yet
- 175 - XLR8 - SES SubmissionDocument37 pages175 - XLR8 - SES SubmissionGowtham ChNo ratings yet
- Anchor Channel 101 - Fundamentals of Cast-In Place Anchor Channel System Design With AC232Document24 pagesAnchor Channel 101 - Fundamentals of Cast-In Place Anchor Channel System Design With AC232Sebastian Fernando Cardona FernandezNo ratings yet
- Strength of Materials MCQsDocument4 pagesStrength of Materials MCQsddeepak123No ratings yet
- General Form of Faraday's Law: D Eds DTDocument40 pagesGeneral Form of Faraday's Law: D Eds DTGadis Kebun BungaNo ratings yet
- Aerodynamics Coarse OutlineDocument3 pagesAerodynamics Coarse OutlineBasil DubeNo ratings yet
- Calculate oil and gas reserves using material balance equationsDocument3 pagesCalculate oil and gas reserves using material balance equationsDon Kedondon100% (1)
- Geotechnics & Concrete Engineering (Hong Kong) LTD.: Contact Details Registration No. HOKLAS 024 Page 1 of 1Document97 pagesGeotechnics & Concrete Engineering (Hong Kong) LTD.: Contact Details Registration No. HOKLAS 024 Page 1 of 1Tony ChungNo ratings yet
- Piper Seneca II Power ManagerDocument1 pagePiper Seneca II Power ManagerAlejandro0% (1)
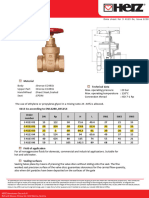
- Herz ValvesDocument11 pagesHerz Valvesat7984582No ratings yet
- 1-Relative Velocity in Special Relativity: Page898 CollegeDocument26 pages1-Relative Velocity in Special Relativity: Page898 CollegeAbdulrhman fNo ratings yet
- GR 7 ASSET WORKSHEET HWDocument6 pagesGR 7 ASSET WORKSHEET HWSharon BijuNo ratings yet
- Visual Testing: - Asme - Section 5 (NDT) - Section 5 - Article 9 (VT)Document29 pagesVisual Testing: - Asme - Section 5 (NDT) - Section 5 - Article 9 (VT)MAXX ENGINEERS100% (1)
- Chapter 3 PDFDocument19 pagesChapter 3 PDFMUHAMMAD LUKMAN ARSHADNo ratings yet
- Heat ModelingDocument284 pagesHeat ModelingfreewareNo ratings yet
- Vickery Watkins 1964 ScrutonNoDocument15 pagesVickery Watkins 1964 ScrutonNoFloydNo ratings yet
- en 12004-2-2017 CenDocument35 pagesen 12004-2-2017 CenMalak Hindi100% (2)