You might also like
- Ase Utra Military and Law Enforcement ProductsDocument12 pagesAse Utra Military and Law Enforcement ProductsjamesfletcherNo ratings yet
- Airbus GlossaryDocument32 pagesAirbus GlossaryLuís Rodrigues100% (2)
- 2015 - 3 Lennar Concord Proposal PDFDocument148 pages2015 - 3 Lennar Concord Proposal PDFEric LiptonNo ratings yet
- Dual Axis Solar Tracker With CleanerDocument6 pagesDual Axis Solar Tracker With CleanerIJRASETPublicationsNo ratings yet
- The Emerald Tablets of Thoth Toth The Atlantean - Table 05Document5 pagesThe Emerald Tablets of Thoth Toth The Atlantean - Table 05Georgiana BealcuNo ratings yet
- Performance Analysis of Cooling TowerDocument7 pagesPerformance Analysis of Cooling TowerIbrahim Al-MutazNo ratings yet
- SOLAR PV SYSTEM MAINTENANCE-finalDocument48 pagesSOLAR PV SYSTEM MAINTENANCE-finaldrkongala100% (1)
- ERT Techniques for Volunteer Fire BrigadesDocument45 pagesERT Techniques for Volunteer Fire BrigadesZionNo ratings yet
- Due Amount: We're ListeningDocument2 pagesDue Amount: We're ListeningYogesh PawarNo ratings yet
- Formulation Development and Evaluation of Sustained Release Tablets of AceclofenacDocument128 pagesFormulation Development and Evaluation of Sustained Release Tablets of Aceclofenacraju narayana padala0% (1)
- 2 Solar Tracking System-2.Document33 pages2 Solar Tracking System-2.m durga prasannaNo ratings yet
- Script For TourguidingDocument2 pagesScript For Tourguidingfshe2677% (125)
- Technologies of solar tracking systems reviewDocument11 pagesTechnologies of solar tracking systems reviewecom mNo ratings yet
- Dual Axis Algo SCIAFDocument12 pagesDual Axis Algo SCIAFEric Tutu TchaoNo ratings yet
- Experimental Monitoring and Comparison of Energy Production On Solar Tracking Systems and Fixed SupportDocument11 pagesExperimental Monitoring and Comparison of Energy Production On Solar Tracking Systems and Fixed SupportIJAR JOURNALNo ratings yet
- Research Article: A Novel Solar Tracker Based On Omnidirectional Computer VisionDocument7 pagesResearch Article: A Novel Solar Tracker Based On Omnidirectional Computer VisionShopitan MarvelNo ratings yet
- GPS Based Portable Dual-Axis Solar Tracking System Using Astronomical EquationDocument6 pagesGPS Based Portable Dual-Axis Solar Tracking System Using Astronomical EquationArturo Díaz PonceNo ratings yet
- Energy Conversion and Management: Masoud Rahimi, Meisam Banybayat, Yaghoub Tagheie, Peyvand Valeh-e-SheydaDocument9 pagesEnergy Conversion and Management: Masoud Rahimi, Meisam Banybayat, Yaghoub Tagheie, Peyvand Valeh-e-SheydaangelicatakamineNo ratings yet
- Concept PaperDocument10 pagesConcept PaperGR RimonNo ratings yet
- Jurnal 2Document31 pagesJurnal 2Zaki ArrayyanNo ratings yet
- Solar Energy: Haohui Liu, Armin G. Aberle, Tonio Buonassisi, Ian Marius PetersDocument7 pagesSolar Energy: Haohui Liu, Armin G. Aberle, Tonio Buonassisi, Ian Marius PetersindrasyifaiNo ratings yet
- 3 General Formula For On Axis Sun TrackiDocument32 pages3 General Formula For On Axis Sun TrackiHussein RamadanNo ratings yet
- Spillage Estimation in A Heliostats Field For Solar Field OptimizationDocument8 pagesSpillage Estimation in A Heliostats Field For Solar Field OptimizationMuqaddasRehmanNo ratings yet
- Energy Reports: Mostefa GhassoulDocument8 pagesEnergy Reports: Mostefa GhassoulEduardo DíazNo ratings yet
- ELM Solar MainDocument18 pagesELM Solar Mainguermoui mawloudNo ratings yet
- Evaluation of Technical Feasibility and Economic Viability of Low Power Standalone Photo Voltaic Sun Tracking SystemDocument8 pagesEvaluation of Technical Feasibility and Economic Viability of Low Power Standalone Photo Voltaic Sun Tracking SystemPremier PublishersNo ratings yet
- Solar Irradiation On The Rear Surface of Bifacial Solar Modules A Modeling Approach2020scientific ReportsOpen AccessDocument10 pagesSolar Irradiation On The Rear Surface of Bifacial Solar Modules A Modeling Approach2020scientific ReportsOpen Accessjack bladesNo ratings yet
- 14 - Automated Solar Operated Water PurifierDocument1 page14 - Automated Solar Operated Water PurifierRajesh RamaswamyNo ratings yet
- A Novel Stationary Concentrator To Enhance Solar Intensity WithDocument10 pagesA Novel Stationary Concentrator To Enhance Solar Intensity WithdocwyfNo ratings yet
- EasyChair Preprint 5063Document10 pagesEasyChair Preprint 5063Shreyas N PNo ratings yet
- Ikhwan - 2019 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 364 - 012038Document8 pagesIkhwan - 2019 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 364 - 012038Harish MardiNo ratings yet
- E3sconf Evf2020 01011Document7 pagesE3sconf Evf2020 01011sabhanNo ratings yet
- Predicting Hourly Solar Irradiance Using Machine Learning MethodsDocument6 pagesPredicting Hourly Solar Irradiance Using Machine Learning MethodsmartinNo ratings yet
- 'Chapter One 1. Background: Dual Axis Solar TrackerDocument59 pages'Chapter One 1. Background: Dual Axis Solar Trackerabel tibebuNo ratings yet
- Outdoor Performance of Low Concentrating Photovoltaic SystemDocument12 pagesOutdoor Performance of Low Concentrating Photovoltaic SystemcmohamedyousufNo ratings yet
- Dual Axis Solar Tracking System With Weather SensorDocument5 pagesDual Axis Solar Tracking System With Weather SensorEditor IJTSRDNo ratings yet
- Irjet V6i184Document2 pagesIrjet V6i184Nandam VamsiNo ratings yet
- Charabi 2014Document11 pagesCharabi 2014khaledNo ratings yet
- Analysis of The Long-Term Solar Potential For Electricity Generation in QatarDocument16 pagesAnalysis of The Long-Term Solar Potential For Electricity Generation in QatarScribedSkypeNo ratings yet
- Duel Axis Solar Tracking SystemDocument29 pagesDuel Axis Solar Tracking SystemSantosh BansodeNo ratings yet
- Smart Sun Tracking SystemDocument7 pagesSmart Sun Tracking SystemPetrescu VasyNo ratings yet
- Solar Tracking SystemsDocument6 pagesSolar Tracking SystemsSimay ÇelikNo ratings yet
- High-Efficiency Solar Tracker Development andDocument6 pagesHigh-Efficiency Solar Tracker Development andRivanildo AlvesNo ratings yet
- A Low Cost Dual Axis Solar Tracking System Based On Digital Logic Design Design and ImplementationDocument14 pagesA Low Cost Dual Axis Solar Tracking System Based On Digital Logic Design Design and ImplementationArturo Díaz PonceNo ratings yet
- zolkapli2013Document5 pageszolkapli2013Dilekh AnisNo ratings yet
- Modeling and Simulation of A Dual-Axis Solar TrackDocument7 pagesModeling and Simulation of A Dual-Axis Solar TrackSandro SouzaNo ratings yet
- A Novel Design of A Bi-Level Automatic Solar Tracker Using Rotations Around Orthogonal AxesDocument6 pagesA Novel Design of A Bi-Level Automatic Solar Tracker Using Rotations Around Orthogonal AxesVijay KapoorNo ratings yet
- Comparative Studies of The Measured and Predicted Values of Global Solar Radiation For Awka, Nigeria Using Selected Seven ModelsDocument6 pagesComparative Studies of The Measured and Predicted Values of Global Solar Radiation For Awka, Nigeria Using Selected Seven ModelsEditor IJTSRDNo ratings yet
- Clear-sky Irradiance Model for Real-time Sky Imager ApplicationDocument10 pagesClear-sky Irradiance Model for Real-time Sky Imager Applicationpaween saetaeNo ratings yet
- Probabilistic Solar Forecasts As A Binary Event UsDocument18 pagesProbabilistic Solar Forecasts As A Binary Event Usloustari.drissNo ratings yet
- zakariah2015Document6 pageszakariah2015Dilekh AnisNo ratings yet
- Performance Evaluation of Existing Sunshine-Based Computing Models For Estimating Global Solar Radiation at Lagos, NigeriaDocument12 pagesPerformance Evaluation of Existing Sunshine-Based Computing Models For Estimating Global Solar Radiation at Lagos, NigeriasamuelNo ratings yet
- Optimization and Performance of Bifacial Solar Modules A GlobalperspectiveDocument10 pagesOptimization and Performance of Bifacial Solar Modules A GlobalperspectiveAlex EijkmanNo ratings yet
- Solar Tracking System: Abstract-The Solar Photovoltaic Panels Are Used To GenerateDocument4 pagesSolar Tracking System: Abstract-The Solar Photovoltaic Panels Are Used To GenerateAdrian Ebero NunezNo ratings yet
- Arduino Based Solar Tracking SystemDocument6 pagesArduino Based Solar Tracking SystemsulienNo ratings yet
- Improve Dual Axis Solar Tracker Algorithm Based On Sunrise and Sunset PositionDocument11 pagesImprove Dual Axis Solar Tracker Algorithm Based On Sunrise and Sunset Positionyogesh sNo ratings yet
- A Comparison of Fuzzy Logic and PID Controller For A Single-Axis Solar Tracking SystemDocument14 pagesA Comparison of Fuzzy Logic and PID Controller For A Single-Axis Solar Tracking SystemSenthil KumarNo ratings yet
- Design and Implementation of Solar Tracking SystemDocument5 pagesDesign and Implementation of Solar Tracking SystemerpublicationNo ratings yet
- Arduino Based Solar Tracking System As A Step Towards Efficient Utilization of Clean Energy A ReviewDocument6 pagesArduino Based Solar Tracking System As A Step Towards Efficient Utilization of Clean Energy A ReviewIJRASETPublicationsNo ratings yet
- Dual Axis Solar TrackerDocument24 pagesDual Axis Solar Trackerpatel_nirav1992No ratings yet
- Optimization of PV Panel Tilt Angle For Short Periods of TimeDocument7 pagesOptimization of PV Panel Tilt Angle For Short Periods of TimeEbenezer ButarbutarNo ratings yet
- 1 s2.0 S0196890415008353 Main PDFDocument10 pages1 s2.0 S0196890415008353 Main PDFsb aliNo ratings yet
- 4136-Article Text-10120-1-10-20150612Document12 pages4136-Article Text-10120-1-10-20150612javed rashidNo ratings yet
- Journal of Physics Conference Series: A Review of Automatic Solar Tracking SystemsDocument6 pagesJournal of Physics Conference Series: A Review of Automatic Solar Tracking SystemsMohammed ANo ratings yet
- Low Cost Dual Axis Automated Sunlight TrackerDocument18 pagesLow Cost Dual Axis Automated Sunlight TrackerSandip DasNo ratings yet
- Dual Axis Solar Tracking SystemDocument17 pagesDual Axis Solar Tracking SystemDeepak KumarNo ratings yet
- Shintemirov SICE 2015Document7 pagesShintemirov SICE 2015Alan WahyudiNo ratings yet
- Renewable and Sustainable Energy Reviews: Rajesh Singh, Suresh Kumar, Anita Gehlot, Rupendra PachauriDocument16 pagesRenewable and Sustainable Energy Reviews: Rajesh Singh, Suresh Kumar, Anita Gehlot, Rupendra PachauriDavid Sierra CalvoNo ratings yet
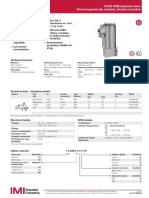
- ICO3S 350B Hydraulic Valve Electromagnetically Actuated, Directly ControlledDocument3 pagesICO3S 350B Hydraulic Valve Electromagnetically Actuated, Directly ControlledUntoro Adi NugrohoNo ratings yet
- Technical Features: Medium: Flow: Port Size: Fluid Temperature: Ambient Temperature: MaterialsDocument8 pagesTechnical Features: Medium: Flow: Port Size: Fluid Temperature: Ambient Temperature: MaterialsUntoro Adi NugrohoNo ratings yet
- Magnum Xt-90 Hermetically Sealed Proximity Switch Magpac Modular Sensors P+F Nj2-V3-N Inductive Proximity SensorDocument2 pagesMagnum Xt-90 Hermetically Sealed Proximity Switch Magpac Modular Sensors P+F Nj2-V3-N Inductive Proximity SensorUntoro Adi NugrohoNo ratings yet
- Data Sheet: W-Series WDU 70N/35Document5 pagesData Sheet: W-Series WDU 70N/35Untoro Adi NugrohoNo ratings yet
- Modular Instrumentation SystemDocument8 pagesModular Instrumentation Systemhisaj4uNo ratings yet
- Aktuator Diapraghm Fisher 30i-70iDocument12 pagesAktuator Diapraghm Fisher 30i-70iUntoro Adi NugrohoNo ratings yet
- Big Joe Type 630SEK PDFDocument12 pagesBig Joe Type 630SEK PDFMargaret DaughertyNo ratings yet
- Ymfc Al SetupDocument18 pagesYmfc Al SetupredaNo ratings yet
- Diagnoza Wstępna Klasa IDocument3 pagesDiagnoza Wstępna Klasa IMagda StręciwilkNo ratings yet
- PWR Bi2Document11 pagesPWR Bi2GOMTINo ratings yet
- User Manual For Digital Logic Trainer KitDocument6 pagesUser Manual For Digital Logic Trainer KitHonnura HarijanaNo ratings yet
- Question According VDA 6.3 Questionnaire 0 0: VDA - 6.3 - Report - Potential - Analysis - 2016 - V3 - Vollversion Seite 1 Von 1Document1 pageQuestion According VDA 6.3 Questionnaire 0 0: VDA - 6.3 - Report - Potential - Analysis - 2016 - V3 - Vollversion Seite 1 Von 1ssierroNo ratings yet
- Model AnswerDocument27 pagesModel AnswerdishaNo ratings yet
- Presidential Decree No. 1616 establishes Intramuros AdministrationDocument22 pagesPresidential Decree No. 1616 establishes Intramuros AdministrationRemiel Joseph Garniel BataoNo ratings yet
- 12.3 Operation Qualification Protocol For Laminar Air Flow UnitDocument4 pages12.3 Operation Qualification Protocol For Laminar Air Flow UnituzairNo ratings yet
- Modeling Endocrine Control of The Pituitary-Ovarian Axis: Androgenic Influence and Chaotic DynamicsDocument22 pagesModeling Endocrine Control of The Pituitary-Ovarian Axis: Androgenic Influence and Chaotic DynamicsKerin ArdyNo ratings yet
- DSBV87ALP Two-Stage Differential Pressure Control Valve SpecsDocument2 pagesDSBV87ALP Two-Stage Differential Pressure Control Valve SpecsadrianioantomaNo ratings yet
- Syngo - Via: HW Data SheetDocument4 pagesSyngo - Via: HW Data SheetCeoĐứcTrườngNo ratings yet
- Brass Valves Spec SheetDocument1 pageBrass Valves Spec SheetSharjeel AbidNo ratings yet
- Strength of CSG and TBGDocument10 pagesStrength of CSG and TBGTiffany DacinoNo ratings yet
- The Human BodyDocument17 pagesThe Human BodyRuthie MendozaNo ratings yet
- 22nd Annual Report 2021-22Document155 pages22nd Annual Report 2021-22Karthic Selvam KandavelNo ratings yet
- Replacing The Volvo Oil Trap and Oil Pan SumpDocument6 pagesReplacing The Volvo Oil Trap and Oil Pan SumpsaifrulNo ratings yet
- Physical Education Week 1 ActivitiesDocument4 pagesPhysical Education Week 1 ActivitiesTummys TummieNo ratings yet
- Slide No. 04 - Pert - Cpm1Document27 pagesSlide No. 04 - Pert - Cpm1NUSRAT RITUNo ratings yet
- Nature 1Document6 pagesNature 1Susanty SainudinNo ratings yet
- 85 KW RequestDocument3 pages85 KW Requestاختر بلوچNo ratings yet
- Effect of Blast Induced Vibrations On GroutDocument55 pagesEffect of Blast Induced Vibrations On GroutDavid marpaungNo ratings yet