You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Solution Manual - Error Control Coding 2nd - by Lin Shu and CostelloDocument126 pagesSolution Manual - Error Control Coding 2nd - by Lin Shu and CostelloSerkan Sezer57% (14)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Nexon EV Owner ManualDocument232 pagesNexon EV Owner ManualDevesh Dolas100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Past Board Exam Problems in Ee All in One PDFDocument62 pagesPast Board Exam Problems in Ee All in One PDFPatrick Michael Angelo PerezNo ratings yet
- University of Central Punjab: Gsn-2203: Numerical AnalysisDocument5 pagesUniversity of Central Punjab: Gsn-2203: Numerical AnalysisSameen Maruf50% (2)
- Homework Set #9, Math 475ADocument3 pagesHomework Set #9, Math 475ASameen MarufNo ratings yet
- Lectures SummaryDocument24 pagesLectures SummarySameen MarufNo ratings yet
- PHY481 - Lectures 7 and Part of 8Document3 pagesPHY481 - Lectures 7 and Part of 8Sameen MarufNo ratings yet
- Gsn-1153: Applied Physics: Instructor: Sameen MarufDocument19 pagesGsn-1153: Applied Physics: Instructor: Sameen MarufSameen MarufNo ratings yet
- Blackout & RestorationDocument9 pagesBlackout & RestorationankitNo ratings yet
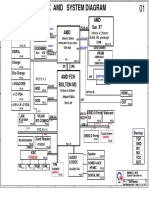
- Amd Amd: +3V/+5V S5 +1.1VS5/+2.5VDocument44 pagesAmd Amd: +3V/+5V S5 +1.1VS5/+2.5VvinuNo ratings yet
- Diagnostic Trouble Codes For Sinotruk HOWO Engines PDFDocument4 pagesDiagnostic Trouble Codes For Sinotruk HOWO Engines PDFhektor Atkinson100% (1)
- Multiple Choice Questions of High Voltage Engineering (01-15)Document25 pagesMultiple Choice Questions of High Voltage Engineering (01-15)DHARANI PATHINo ratings yet
- Siemens S7 PLC CatalogueDocument22 pagesSiemens S7 PLC CatalogueMOLDNNo ratings yet
- Model Yuea36Fs-Uer-K V/PH/HZ 230/1/60: Exploded View and Spare Part ListDocument4 pagesModel Yuea36Fs-Uer-K V/PH/HZ 230/1/60: Exploded View and Spare Part ListJose Enrique Sanchez ThompsonNo ratings yet
- SCALA2-Service Kit InstructionsDocument28 pagesSCALA2-Service Kit InstructionsJanzuar RamadhanyNo ratings yet
- FARO Laser Tracker VantageDocument190 pagesFARO Laser Tracker VantageGUILLERMO RODRIGUEZNo ratings yet
- RFID Based Prepaid Energy Meter ReportDocument19 pagesRFID Based Prepaid Energy Meter ReportTanvir RahmanNo ratings yet
- Quick Guide Huawei SUN2000!3!10KTL M1 Trifase Solar InverterDocument29 pagesQuick Guide Huawei SUN2000!3!10KTL M1 Trifase Solar InverterCiprian RusuNo ratings yet
- SINAV ENGgDocument3 pagesSINAV ENGgRecep YoldaşNo ratings yet
- Objective:: Write An Experiment On Zener Diode ClipperDocument13 pagesObjective:: Write An Experiment On Zener Diode ClipperSyed Ali Raza ShahNo ratings yet
- Ccs 800Document113 pagesCcs 800areleemeanNo ratings yet
- Logic PlusDocument19 pagesLogic Plusirfan3241No ratings yet
- Assignment # 1 Principles of Steady-State Converter AnalysisDocument20 pagesAssignment # 1 Principles of Steady-State Converter AnalysisMandanas, John MaledrexNo ratings yet
- System Verilog: Question 1. What Is Callback ?Document15 pagesSystem Verilog: Question 1. What Is Callback ?Shreyas S R100% (1)
- Servo-S - Service Manual - EN - All PDFDocument80 pagesServo-S - Service Manual - EN - All PDFFabricio Almeida100% (1)
- Lesson Plan in Science 8Document4 pagesLesson Plan in Science 8mohamed harbNo ratings yet
- CPU-XL VariSpark IOM 12-13Document97 pagesCPU-XL VariSpark IOM 12-13SaasiNo ratings yet
- Lab Class Routine Spring 2020 Semester - 2Document1 pageLab Class Routine Spring 2020 Semester - 2Al-jubaer Bin Jihad PlabonNo ratings yet
- WDS 190AS1 191AS1 Compact Digital IndicatorDocument1 pageWDS 190AS1 191AS1 Compact Digital IndicatorNavneet SinghNo ratings yet
- Power Failure Backup CompletoDocument93 pagesPower Failure Backup CompletoBrentilda100% (1)
- Refrigerator Troubleshooting GuideDocument51 pagesRefrigerator Troubleshooting Guideantoniofortese100% (1)
- Electricity Regulations and As NZSDocument3 pagesElectricity Regulations and As NZSOskar ReeseNo ratings yet
- TeSys Deca Contactors - LC1D326SDDocument4 pagesTeSys Deca Contactors - LC1D326SDaligamers70No ratings yet
- BST501 Plus Automobile Engine Electrical Problem TesterDocument14 pagesBST501 Plus Automobile Engine Electrical Problem TesterMiguel AutomotrizNo ratings yet
- Current Electricity HDHW Vsa & Sa 2023Document6 pagesCurrent Electricity HDHW Vsa & Sa 2023mishra.sanskar12345No ratings yet
- NJW1153 NewJapanRadioDocument20 pagesNJW1153 NewJapanRadioPavanBasavaniNo ratings yet