You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SKF Okf & Okfa CouplingDocument12 pagesSKF Okf & Okfa CouplingJurun_BidanshiNo ratings yet
- Modeling Tuned Mass Dampers (TMD) in Autodesk Robot Structural Analysis Professional Description of ExampleDocument1 pageModeling Tuned Mass Dampers (TMD) in Autodesk Robot Structural Analysis Professional Description of ExampleJillian Howard0% (1)
- Din 4024Document13 pagesDin 4024Muhammad Hassan100% (3)
- Study On Vibration Analysis For Printed Circuit Board of An Electronic ApparatusDocument6 pagesStudy On Vibration Analysis For Printed Circuit Board of An Electronic ApparatusAnand Ras100% (1)
- A17-23495A Installation Manual KS12-BCV-413B L1100Document19 pagesA17-23495A Installation Manual KS12-BCV-413B L1100davalgonzalezNo ratings yet
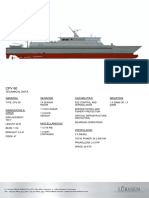
- Technical Data General Sensors Capabilities WeaponsDocument1 pageTechnical Data General Sensors Capabilities WeaponsdavalgonzalezNo ratings yet
- TutorialCSR OTDocument146 pagesTutorialCSR OTdavalgonzalezNo ratings yet
- White Paper o P 2014 Efficient PropellerDocument12 pagesWhite Paper o P 2014 Efficient PropellerdavalgonzalezNo ratings yet
- Hoja Técnica Catpump 3545Document4 pagesHoja Técnica Catpump 3545davalgonzalez100% (1)
- 659E Chockfast OrangeDocument2 pages659E Chockfast OrangedavalgonzalezNo ratings yet
- Fairbanks Nijhuis Municipal Pump ProductsDocument8 pagesFairbanks Nijhuis Municipal Pump Productsdavalgonzalez100% (1)
- English Spanish Glossary Nautical TermsDocument74 pagesEnglish Spanish Glossary Nautical Termsdavalgonzalez100% (1)
- YuzhaoMaDissertation PDFDocument161 pagesYuzhaoMaDissertation PDFTygerYashanshuNo ratings yet
- 4modal Analysis of RCC Chimney Gm23sept13vitDocument4 pages4modal Analysis of RCC Chimney Gm23sept13vitreenaNo ratings yet
- Pump Isolation PaperDocument22 pagesPump Isolation PaperRoozbeh PNo ratings yet
- Isolator Selection GuideDocument30 pagesIsolator Selection GuideRaasik Jain100% (1)
- VD Cls NotesDocument56 pagesVD Cls NotesAzhagiriNo ratings yet
- Evanescent-Mode Coupling of Dual-Mode Rectangular Waveguide FiltersDocument6 pagesEvanescent-Mode Coupling of Dual-Mode Rectangular Waveguide FiltersHuong Thu TranNo ratings yet
- Impact Echo MethodDocument19 pagesImpact Echo Methodjs kalyana ramaNo ratings yet
- Finite Element Analysis of 99.60 M High Roller Compacted Concrete (RCC) Gravity Dam - Special Emphasis On Dynamic AnalysisDocument5 pagesFinite Element Analysis of 99.60 M High Roller Compacted Concrete (RCC) Gravity Dam - Special Emphasis On Dynamic AnalysisIAEME PublicationNo ratings yet
- Static Dynamic Thermal Analysis AnsysDocument5 pagesStatic Dynamic Thermal Analysis AnsystarasasankaNo ratings yet
- IMAC XIII 13th 13 5 3 A Method Forced Harmonic Response Substructures Coupled by Non Linear PDFDocument7 pagesIMAC XIII 13th 13 5 3 A Method Forced Harmonic Response Substructures Coupled by Non Linear PDFjeyaselvanmNo ratings yet
- Centrifugal Compressor Pulsation-Vibration ProblemsDocument4 pagesCentrifugal Compressor Pulsation-Vibration ProblemszaidbismaNo ratings yet
- Matec - VSR ManualDocument20 pagesMatec - VSR ManualPhung Tuan AnhNo ratings yet
- Flow Induced Vibration Choke ValvesDocument8 pagesFlow Induced Vibration Choke Valvesharmeeksingh01No ratings yet
- Iahr 2006 2 PDFDocument15 pagesIahr 2006 2 PDFRabei RomulusNo ratings yet
- Aae009 - Fem - Question BankDocument16 pagesAae009 - Fem - Question BankChekka SudheerNo ratings yet
- Static, Dynamic and Impact Stress Analysis of A Bus Body Structure Using Finite Element AnalysisDocument12 pagesStatic, Dynamic and Impact Stress Analysis of A Bus Body Structure Using Finite Element AnalysisTJPRC PublicationsNo ratings yet
- Absynth ManualDocument41 pagesAbsynth ManualBlanca Rios MartinNo ratings yet
- Rail Oscillation Forces - Assessment RSDocument23 pagesRail Oscillation Forces - Assessment RSSwapan Kumar BoseNo ratings yet
- Chapter 3 FYPDocument7 pagesChapter 3 FYPFong Pei TyngNo ratings yet
- Vibration AnalysisDocument14 pagesVibration AnalysisHarish KumarNo ratings yet
- Example of Seismic Design of A Building With Structured Walls PDFDocument156 pagesExample of Seismic Design of A Building With Structured Walls PDFLeutrim AvdiuNo ratings yet
- Seismic Analysis Comparative Study by Using Eurocode 8 and RPA99Document8 pagesSeismic Analysis Comparative Study by Using Eurocode 8 and RPA99Gloriant KokoliNo ratings yet
- Modal Analysis of A Snare DrumDocument21 pagesModal Analysis of A Snare Drumandrew2No ratings yet
- Flight Test #3 ReportDocument30 pagesFlight Test #3 ReportBsharrell100% (1)
- CST STUDIO SUITE Help PDFDocument3 pagesCST STUDIO SUITE Help PDFMd Ibrahim Khalil Salman0% (1)
- Is 11717 2000Document40 pagesIs 11717 2000simplyneerajNo ratings yet