You might also like
- Basics of Finite Element AnalysisDocument121 pagesBasics of Finite Element AnalysisChetan The game changerNo ratings yet
- 13 - Fea PDFDocument121 pages13 - Fea PDFChetan The game changerNo ratings yet
- Basics of Finite Element AnalysisDocument117 pagesBasics of Finite Element AnalysispgkaeroNo ratings yet
- Lecture 2 Truss and Beam FEMDocument30 pagesLecture 2 Truss and Beam FEMRajasekhar Reddy Anekallu0% (1)
- 6-Virtual Work MethodDocument28 pages6-Virtual Work Methodismail457No ratings yet
- History of Finite Element AnalysisDocument70 pagesHistory of Finite Element Analysisjeovan50% (2)
- The Finite Element Method For The Analysis of Non-Linear and Dynamic SystemsDocument20 pagesThe Finite Element Method For The Analysis of Non-Linear and Dynamic SystemsvcKampNo ratings yet
- FEA Question BankDocument6 pagesFEA Question Bankmenmoli2012No ratings yet
- MIT2 080JF13 Lecture2 PDFDocument26 pagesMIT2 080JF13 Lecture2 PDFAbhilashJanaNo ratings yet
- Mae 456 Finite Element Analysis EXAM 1 Practice Questions NameDocument13 pagesMae 456 Finite Element Analysis EXAM 1 Practice Questions Namechellamv100% (1)
- Lecture4 AllDocument30 pagesLecture4 AlladeelyjNo ratings yet
- FINITE ELEMENT METHODS - Model PaperDocument3 pagesFINITE ELEMENT METHODS - Model PaperUpendra NeravatiNo ratings yet
- MPZ4230-Assignment 01-04Document10 pagesMPZ4230-Assignment 01-04surangabongaNo ratings yet
- This Content Downloaded From 140.112.26.187 On Mon, 10 Apr 2023 09:29:57 UTCDocument31 pagesThis Content Downloaded From 140.112.26.187 On Mon, 10 Apr 2023 09:29:57 UTCNothing ConnoisseurNo ratings yet
- Exam2 113-Solution PDFDocument10 pagesExam2 113-Solution PDFXio QueridoNo ratings yet
- ME 1401 FEA - VII Sem (ME)Document42 pagesME 1401 FEA - VII Sem (ME)Subramanian ManivelNo ratings yet
- Modified Tj's Method For Yield Line Analysis and Design of SlabsDocument7 pagesModified Tj's Method For Yield Line Analysis and Design of SlabsAJER JOURNALNo ratings yet
- 1d Finite Elements - TheoryDocument34 pages1d Finite Elements - TheoryKristina OraNo ratings yet
- Structure Analysis - I I Lab Manual: Prepared By: Parveen Berwal Approved By: Dr. Arabinda SharmaDocument31 pagesStructure Analysis - I I Lab Manual: Prepared By: Parveen Berwal Approved By: Dr. Arabinda Sharmapiu dasNo ratings yet
- Advanced Solid Mechanics - Problem 2Document2 pagesAdvanced Solid Mechanics - Problem 2Sandesh TripathiNo ratings yet
- DirectMethod BeamsDocument49 pagesDirectMethod BeamsouguewayNo ratings yet
- Introduction:The Stability and Instability of Structural Elements in Offshore StructuresDocument6 pagesIntroduction:The Stability and Instability of Structural Elements in Offshore Structuressudipta_chakraborty_78No ratings yet
- Intensive ClassDocument163 pagesIntensive ClassJieqian Zhang100% (2)
- 2010 AocDocument15 pages2010 Aocprakhargupta41No ratings yet
- Free Vibrations of Simply Supported Beams Using Fourier SeriesDocument17 pagesFree Vibrations of Simply Supported Beams Using Fourier SeriesMauro GuerreiroNo ratings yet
- Fem 16M-1Document13 pagesFem 16M-1Abdul NazèêrNo ratings yet
- Laplace EquationDocument4 pagesLaplace EquationRizwan SamorNo ratings yet
- Ex 1 Cantilever BeamDocument16 pagesEx 1 Cantilever BeamIzzat Khair Bin MahmudNo ratings yet
- Unit 3 NotesDocument63 pagesUnit 3 NotesDamotharan Sathesh KumarNo ratings yet
- 1985 - (ReC85)Document12 pages1985 - (ReC85)Jorge LlimpeNo ratings yet
- Unit - I ElectrostaticsDocument27 pagesUnit - I ElectrostaticsAMIT SINGHNo ratings yet
- Field (A) Electromagnetic Sheet 10th of RamadanDocument6 pagesField (A) Electromagnetic Sheet 10th of RamadanaboashoorNo ratings yet
- Ruhr-Universitybochum Computational Engineering Examination Mechanics of Solids 01.03.2010 Prof. Dr.-Ing. Holger SteebDocument8 pagesRuhr-Universitybochum Computational Engineering Examination Mechanics of Solids 01.03.2010 Prof. Dr.-Ing. Holger SteebNguyen Minh ThuongNo ratings yet
- Answers & Solutions JEE (Main) - 2023 (Online) Phase-2: Memory BasedDocument14 pagesAnswers & Solutions JEE (Main) - 2023 (Online) Phase-2: Memory BasedRajan KushwahaNo ratings yet
- Basic Concepts:: U (1/2EI) M (X) DX U L: V And, Since W UDocument7 pagesBasic Concepts:: U (1/2EI) M (X) DX U L: V And, Since W UAberaMamoJaletaNo ratings yet
- Nonlinear Analysis of Shells Using The MITC FormulDocument51 pagesNonlinear Analysis of Shells Using The MITC Formulmuhamad doskyNo ratings yet
- CH07 Stress-Analysis 2DDocument33 pagesCH07 Stress-Analysis 2DRanjit Koshy AlexanderNo ratings yet
- Ps 1Document2 pagesPs 1baoke renNo ratings yet
- Fulltext StampedDocument18 pagesFulltext StampedscarlettNo ratings yet
- Fem ViberationDocument18 pagesFem Viberationsaqlain05No ratings yet
- PH2130C 2006 Exam PaperaDocument7 pagesPH2130C 2006 Exam PaperabbteenagerNo ratings yet
- HW 1 SolutionDocument9 pagesHW 1 SolutionbharathNo ratings yet
- Buckling and Harmonic Analysis With FEM: E. Tarallo, G. MastinuDocument13 pagesBuckling and Harmonic Analysis With FEM: E. Tarallo, G. MastinuAbdul AzizNo ratings yet
- FEM Question BankDocument13 pagesFEM Question BankmanisekNo ratings yet
- Large Deflection Static Analysis of Rectangular Plates On Two Parameter Elastic FoundationsDocument9 pagesLarge Deflection Static Analysis of Rectangular Plates On Two Parameter Elastic FoundationsAnonymous wWOWz9UnWNo ratings yet
- Physics I - Final - Fall 2006 Answer Key: Part A-1 - 48 Points (12 × 4) - There Is Partial Credit For Some QuestionsDocument5 pagesPhysics I - Final - Fall 2006 Answer Key: Part A-1 - 48 Points (12 × 4) - There Is Partial Credit For Some QuestionsAndrian BesliuNo ratings yet
- W4 Beam Deflection-1 - Rev2Document39 pagesW4 Beam Deflection-1 - Rev271apizNo ratings yet
- Technical AssesmentDocument7 pagesTechnical AssesmentbikramjitpodderNo ratings yet
- Present Ac I On Cap I Tulo 2 AngelesDocument122 pagesPresent Ac I On Cap I Tulo 2 AngelesyumekaiNo ratings yet
- Viscous Fluid FlowDocument48 pagesViscous Fluid FlowTrym Erik Nielsen100% (1)
- ME664-Truss ElementDocument36 pagesME664-Truss ElementSamet AKARNo ratings yet
- Plakhtienko 2002Document8 pagesPlakhtienko 2002sonu mathewNo ratings yet
- Initial and Boundary Value Problems Involving The Inhomogeneous Weber Equation and The Nield-Kuznetsov Parametric FunctionsDocument16 pagesInitial and Boundary Value Problems Involving The Inhomogeneous Weber Equation and The Nield-Kuznetsov Parametric FunctionstheijesNo ratings yet
- Pile Driving Analysis & Dynamic Pile TestingDocument88 pagesPile Driving Analysis & Dynamic Pile Testingbsitler100% (2)
- En0175 04Document8 pagesEn0175 04lakhiNo ratings yet
- Application of Differential Transform Method in Free Vibration Analysis of Rotating Non-Prismatic BeamsDocument8 pagesApplication of Differential Transform Method in Free Vibration Analysis of Rotating Non-Prismatic BeamsKhairul Anuar RahmanNo ratings yet
- HW1Document2 pagesHW1Jimmy LauNo ratings yet
- Structeral Stability Theory-Take-Home ExamDocument15 pagesStructeral Stability Theory-Take-Home ExamDidier D. Boko-haya100% (1)
- Me6603 Fea Rejinpaul Iq Am19Document5 pagesMe6603 Fea Rejinpaul Iq Am19shivesh rockesNo ratings yet
- Freeform Surface Modelling: Freeform Surface Modelling Is The Art of Engineering Freeform Surfaces With ADocument4 pagesFreeform Surface Modelling: Freeform Surface Modelling Is The Art of Engineering Freeform Surfaces With ASahil SharmaNo ratings yet
- Solidworks PDFDocument9 pagesSolidworks PDFSahil SharmaNo ratings yet
- Figure 1: Constant Pitch, Constant Profile and Variable Pitch, Variable ProfileDocument2 pagesFigure 1: Constant Pitch, Constant Profile and Variable Pitch, Variable ProfileSahil SharmaNo ratings yet
- Profile ControlDocument9 pagesProfile ControlSahil SharmaNo ratings yet
- Conceptual Designs Towards Developing Mechanically Controlled Semi-Automated Grass CutterDocument5 pagesConceptual Designs Towards Developing Mechanically Controlled Semi-Automated Grass CutterSahil SharmaNo ratings yet
- Iso ThreadsDocument8 pagesIso ThreadsSahil SharmaNo ratings yet
- Spec Schedule40 Pipe Galvanized PDFDocument2 pagesSpec Schedule40 Pipe Galvanized PDFSahil SharmaNo ratings yet
- How To Create EndmillDocument13 pagesHow To Create EndmillSahil SharmaNo ratings yet
- Plummer BlockDocument30 pagesPlummer BlockSahil SharmaNo ratings yet
- Tutorial: Modelling Spring Having Any Given Trajectory in Pro/EDocument9 pagesTutorial: Modelling Spring Having Any Given Trajectory in Pro/ESahil SharmaNo ratings yet
- How To Model StarckDocument30 pagesHow To Model StarckSahil SharmaNo ratings yet
- Ferro FluidDocument6 pagesFerro FluidSahil SharmaNo ratings yet
- GyroscopeDocument24 pagesGyroscopeSahil Sharma100% (13)
- GyroscopeDocument14 pagesGyroscopeSahil SharmaNo ratings yet
- CST Thermal1Document16 pagesCST Thermal1Edison Andres Zapata OchoaNo ratings yet
- Chapter ThreeDocument38 pagesChapter ThreeAbi DemNo ratings yet
- Pressure Vessel Technology: Past, Present and Future: John Spence and John Darlaston George Stephenson Lecture 1998Document37 pagesPressure Vessel Technology: Past, Present and Future: John Spence and John Darlaston George Stephenson Lecture 1998mariomatoNo ratings yet
- DSFfilmDocument4 pagesDSFfilmGagandeep BhatiaNo ratings yet
- Stabilization of Steel Structures by Sandwich PanelsDocument71 pagesStabilization of Steel Structures by Sandwich PanelsDaniel Conway100% (1)
- ELECTROSTATICSDocument4 pagesELECTROSTATICSRyan CantigaNo ratings yet
- Structural Mechanical Properties of Nb2CDocument6 pagesStructural Mechanical Properties of Nb2Cjohn snowNo ratings yet
- GATE-2006 Physics Question PaperDocument19 pagesGATE-2006 Physics Question PaperDavid HudsonNo ratings yet
- Hydrodynamic Effects During Earthquakes On Dams and Retaining WallsDocument6 pagesHydrodynamic Effects During Earthquakes On Dams and Retaining WallsAndres CaroNo ratings yet
- ST4101 - Unit 2Document20 pagesST4101 - Unit 2sivabalanNo ratings yet
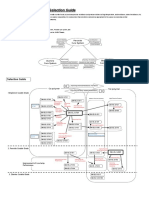
- Fluoroelastomer DAIEL Selection Guide: Peroxide Cure SystemDocument1 pageFluoroelastomer DAIEL Selection Guide: Peroxide Cure Systemkyeong cheol leeNo ratings yet
- Investigation of Automobile Radiator Using Nanofluid-Cuo/Water Mixture As CoolantDocument10 pagesInvestigation of Automobile Radiator Using Nanofluid-Cuo/Water Mixture As Coolantdheerendra vermaNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityShivam PanchalNo ratings yet
- Hot Working Cold WorkingDocument2 pagesHot Working Cold WorkingBivas Panigrahi100% (1)
- Test in Science 6Document1 pageTest in Science 6John BunayNo ratings yet
- BearingDocument4 pagesBearingJITENDRA BISWALNo ratings yet
- Curva 5K 8x5-18 STDDocument2 pagesCurva 5K 8x5-18 STDRoyer SanchezNo ratings yet
- Determination of Forming Limit Diagram For Aisi 1008 Steel Sheet by Theoratical, Experimental and Fea MethodDocument7 pagesDetermination of Forming Limit Diagram For Aisi 1008 Steel Sheet by Theoratical, Experimental and Fea Methodnsk143446No ratings yet
- NG22 280 Cat SPD 000019 - 00Document20 pagesNG22 280 Cat SPD 000019 - 00Theophilus OrupaboNo ratings yet
- Common Mistakes in Fatigue AnalysisDocument14 pagesCommon Mistakes in Fatigue AnalysismuhannedNo ratings yet
- Bearing Lubrication: Characteristics of Grease Lubricants Used in General Bearing ProductsDocument7 pagesBearing Lubrication: Characteristics of Grease Lubricants Used in General Bearing Productssureshnfcl100% (1)
- Electronics Device PDFDocument38 pagesElectronics Device PDFFariz Azhar AbdillahNo ratings yet
- Engineering Rock Mass Classific - Bhawani SinghDocument46 pagesEngineering Rock Mass Classific - Bhawani Singhtita zhafira100% (1)
- European Steel and Alloy GradesDocument2 pagesEuropean Steel and Alloy Gradesfarshid KarpasandNo ratings yet
- 2000 Reff2021 PDFDocument7 pages2000 Reff2021 PDFocsspectroNo ratings yet
- CISC HandbookRev10 2 PDFDocument12 pagesCISC HandbookRev10 2 PDFbasilecoqNo ratings yet
- Chapter 3 Permeability Part 1Document22 pagesChapter 3 Permeability Part 1PugalNo ratings yet
- Bridge Engineering: Prof. Nirjhar DhangDocument24 pagesBridge Engineering: Prof. Nirjhar DhangSulabh BiswasNo ratings yet
- Suitability of Steel Slag As A Refractory MaterialDocument7 pagesSuitability of Steel Slag As A Refractory MaterialSEP-PublisherNo ratings yet
- Kova Fasteners PVT - LTD: Heat Treatment Report Material DescriptionDocument3 pagesKova Fasteners PVT - LTD: Heat Treatment Report Material DescriptionAmandeep SinghNo ratings yet