You might also like
- Eigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelDocument7 pagesEigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelKrishna Ram BudhathokiNo ratings yet
- What A Blast!: Dominik Zankl, Stefan Schuster, Reinhard Feger, and Andreas StelzerDocument18 pagesWhat A Blast!: Dominik Zankl, Stefan Schuster, Reinhard Feger, and Andreas Stelzerrahul kumarNo ratings yet
- Equalization MotionDocument10 pagesEqualization MotionMahmud JaafarNo ratings yet
- BLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverDocument6 pagesBLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDocument16 pagesA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranNo ratings yet
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDocument25 pagesHST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingSrinivas SaiNo ratings yet
- EE4601 Communication Systems: Week 13 Linear Zero Forcing EqualizationDocument14 pagesEE4601 Communication Systems: Week 13 Linear Zero Forcing Equalizationamjc16No ratings yet
- Introduction To Equalization: Guy Wolf Roy Ron Guy ShwartzDocument50 pagesIntroduction To Equalization: Guy Wolf Roy Ron Guy ShwartzShilpi RaiNo ratings yet
- A Novel Linear MMSE Detection Technique For MC-CDMADocument4 pagesA Novel Linear MMSE Detection Technique For MC-CDMANitin Suyan PanchalNo ratings yet
- Symbol Detection in MIMO System: y HX + VDocument12 pagesSymbol Detection in MIMO System: y HX + VhoangthuyanhNo ratings yet
- BER For BPSK in OFDM With Rayleigh Multipath ChannelDocument6 pagesBER For BPSK in OFDM With Rayleigh Multipath ChannelNaveen Kumar ChadalavadaNo ratings yet
- A Low Complexity Channel Estimation Algorithm For Massive MIMO SystemDocument12 pagesA Low Complexity Channel Estimation Algorithm For Massive MIMO SystemilbahiNo ratings yet
- Performance Analysis of V-Blast Based MIMO-OFDM System With Various Detection TechniquesDocument4 pagesPerformance Analysis of V-Blast Based MIMO-OFDM System With Various Detection Techniqueszizo1921No ratings yet
- Fading SimulationDocument45 pagesFading SimulationAtef Al-Kotafi Al-AbdiNo ratings yet
- Common Phase Error Due To Phase Noise in Ofdm - Estimation and SuppressionDocument5 pagesCommon Phase Error Due To Phase Noise in Ofdm - Estimation and SuppressionemadhusNo ratings yet
- Unit II Radio ReceiversDocument29 pagesUnit II Radio ReceiversecekluNo ratings yet
- Simulation ModelDocument21 pagesSimulation Modelashuluck2007No ratings yet
- MU-MIMO BC Handy FormulaeDocument2 pagesMU-MIMO BC Handy Formulaeboss_bandorNo ratings yet
- Performance of Channel Estimation in OFDM System For Different PSK ModulationsDocument6 pagesPerformance of Channel Estimation in OFDM System For Different PSK ModulationsliiNo ratings yet
- 08.508 DSP Lab Expt No 6 HandoutDocument7 pages08.508 DSP Lab Expt No 6 HandoutAssini HussainNo ratings yet
- Matched FilterDocument5 pagesMatched FilterGunzayn SarthyaNo ratings yet
- DWC-USRP - LectureNotes PDFDocument84 pagesDWC-USRP - LectureNotes PDFJesús Mendoza PadillaNo ratings yet
- Channel Estimation ModelingDocument15 pagesChannel Estimation ModelingJohn TranNo ratings yet
- Generating Signal With MATLABDocument4 pagesGenerating Signal With MATLABondoy49250% (1)
- CH 5Document43 pagesCH 5ubyisismayilNo ratings yet
- A Conceptual Study of OFDM-based Multiple Access SchemesDocument7 pagesA Conceptual Study of OFDM-based Multiple Access SchemeswoodksdNo ratings yet
- Assignment ET 4061-5061Document2 pagesAssignment ET 4061-5061LuitaNo ratings yet
- FitsumDocument6 pagesFitsumFetsum LakewNo ratings yet
- Channel Estimation Algorithms For OFDM SystemsDocument5 pagesChannel Estimation Algorithms For OFDM Systemsdearprasanta6015No ratings yet
- Experiment: 1: Program: Write A Program To Implement Matrix Algebra. Software Used: MATLAB 7.6Document28 pagesExperiment: 1: Program: Write A Program To Implement Matrix Algebra. Software Used: MATLAB 7.6Akash GoelNo ratings yet
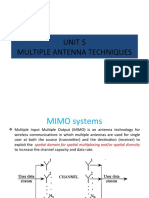
- Unit 5Document47 pagesUnit 5menakadevieceNo ratings yet
- A Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystemDocument6 pagesA Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystempreetiNo ratings yet
- CSPII Lab InstructionsDocument8 pagesCSPII Lab InstructionsSadiqur Rahaman SumonNo ratings yet
- Noise Variance Estimation in MIMOOFDMtestbedDocument114 pagesNoise Variance Estimation in MIMOOFDMtestbedvijaykannamallaNo ratings yet
- Chapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsDocument21 pagesChapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsproteccionesNo ratings yet
- Performance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversDocument5 pagesPerformance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversNetsanet JemalNo ratings yet
- Wimax Bit Error Rate (Ber) With Awgn Channel For Variable Modulation TechniquesDocument9 pagesWimax Bit Error Rate (Ber) With Awgn Channel For Variable Modulation TechniquesIzza AnshoryNo ratings yet
- Assignment Rough WorkDocument7 pagesAssignment Rough Workmunna_mantra896919No ratings yet
- Probability AssignmentDocument10 pagesProbability Assignmentrabya waheedNo ratings yet
- Joint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmDocument8 pagesJoint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Improved Adaptive Bit Error Rate Performance For Fading Channel CommunicationDocument10 pagesImproved Adaptive Bit Error Rate Performance For Fading Channel CommunicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Improving Channel Estimation Accuracy in OFDM System Using MATLAB SimulationDocument3 pagesImproving Channel Estimation Accuracy in OFDM System Using MATLAB SimulationNitin Suyan PanchalNo ratings yet
- 03 SoftwareDocument4 pages03 SoftwareKamal Cruz LeNo ratings yet
- Performance of Diversity Combining Techniques For Antenna ArraysDocument4 pagesPerformance of Diversity Combining Techniques For Antenna ArraysTushar SaxenaNo ratings yet
- Channel Estimation For Massive MIMO Using Gaussian-Mixture Bayesian LearningDocument78 pagesChannel Estimation For Massive MIMO Using Gaussian-Mixture Bayesian Learningjagadeesh jagadeNo ratings yet
- Computer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumDocument39 pagesComputer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumRaju ImandiNo ratings yet
- Optimization of Training Sequence Length For Enhancement of Channel Capacity in Wireless CommunicationsDocument8 pagesOptimization of Training Sequence Length For Enhancement of Channel Capacity in Wireless CommunicationsbaladurgaprasadsNo ratings yet
- IIR Filter Design With MATLABDocument13 pagesIIR Filter Design With MATLABseemabNo ratings yet
- The Laws of Cryptography With Java CodeDocument334 pagesThe Laws of Cryptography With Java CodeAdarsh100% (1)
- Robust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrorDocument5 pagesRobust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrortrNo ratings yet
- DSP Architecture PDFDocument353 pagesDSP Architecture PDFNhật TrungNo ratings yet
- On The Performance of The MIMO Zero-Forcing Receiver in The Presence of Channel Estimation ErrorDocument6 pagesOn The Performance of The MIMO Zero-Forcing Receiver in The Presence of Channel Estimation ErrorPawanKumar BarnwalNo ratings yet
- Matlab Tutorial 2Document7 pagesMatlab Tutorial 2Shivram TabibuNo ratings yet
- Print Fading ChannelDocument18 pagesPrint Fading ChannelRishabh TewariNo ratings yet
- 8-Channel Models EstimationDocument11 pages8-Channel Models EstimationLadissa HarvidiantiNo ratings yet
- E 5 EqDocument56 pagesE 5 EqMehwish AliNo ratings yet
- QUESTIONSDocument4 pagesQUESTIONSANMOLNo ratings yet
- Problems For PracticeDocument6 pagesProblems For Practiceprannoys100% (1)
- Module 2 Ethics Morals and ValuesDocument44 pagesModule 2 Ethics Morals and ValuesSudeesh SudevanNo ratings yet
- Syllabus MET203Document12 pagesSyllabus MET203Sudeesh SudevanNo ratings yet
- Grinding MachinesDocument34 pagesGrinding MachinesSudeesh SudevanNo ratings yet
- Fifth Semester Mechanical Engineering Internal Test I - September 2018 Ee 311 - Electrical Drives and Control For AutomationDocument1 pageFifth Semester Mechanical Engineering Internal Test I - September 2018 Ee 311 - Electrical Drives and Control For AutomationSudeesh SudevanNo ratings yet
- ME404 - Industrial Engineering: Module-IIIDocument16 pagesME404 - Industrial Engineering: Module-IIISudeesh SudevanNo ratings yet
- Reciprocating PumpDocument43 pagesReciprocating PumpSudeesh SudevanNo ratings yet
- Sequencing and Scheduling - An Overview: Chapter-IiDocument14 pagesSequencing and Scheduling - An Overview: Chapter-IiSudeesh SudevanNo ratings yet
- ME 201 Mechanics of SolidsDocument3 pagesME 201 Mechanics of SolidsSudeesh SudevanNo ratings yet
- Apj Abdul Kalam Technological University Thiruvananthapuram, Kerala, INDIADocument15 pagesApj Abdul Kalam Technological University Thiruvananthapuram, Kerala, INDIASudeesh SudevanNo ratings yet
- ME 206 Fluid MachineryDocument3 pagesME 206 Fluid MachinerySudeesh SudevanNo ratings yet
- Answer To Assignment 1 Questions: 1. (C) 2. (B) 3. (D) 4. (B) 5. (D) 6. (B) 7. (C)Document2 pagesAnswer To Assignment 1 Questions: 1. (C) 2. (B) 3. (D) 4. (B) 5. (D) 6. (B) 7. (C)Sudeesh SudevanNo ratings yet
- Matlab - Practice ProblemsDocument5 pagesMatlab - Practice ProblemsSudeesh SudevanNo ratings yet
- Quality CircleDocument33 pagesQuality CircleSudeesh SudevanNo ratings yet
- ME09 804 1st SeriesDocument1 pageME09 804 1st SeriesSudeesh SudevanNo ratings yet
- 3performance Study of BiodieselDocument1 page3performance Study of BiodieselSudeesh SudevanNo ratings yet
- Articles From General Knowledge Today: Quiz 605: Indian History For SSC ExaminationsDocument4 pagesArticles From General Knowledge Today: Quiz 605: Indian History For SSC ExaminationsSudeesh SudevanNo ratings yet
- Sgpa Calculator (Sis2) : Subjects of Study Intermal End Sem Grade Total Out of 100Document2 pagesSgpa Calculator (Sis2) : Subjects of Study Intermal End Sem Grade Total Out of 100Sudeesh SudevanNo ratings yet
- Question Bank ME14 303 Fluid MechanicsDocument6 pagesQuestion Bank ME14 303 Fluid MechanicsSudeesh SudevanNo ratings yet
- Lab ViewDocument1 pageLab ViewSudeesh SudevanNo ratings yet
- Lesson Plan - Fluid Mechanics s3mDocument2 pagesLesson Plan - Fluid Mechanics s3mSudeesh SudevanNo ratings yet
- Lathes Machine CatalogueDocument19 pagesLathes Machine CatalogueAdanaNo ratings yet
- Dataware Q&a BankDocument42 pagesDataware Q&a BankSruthy Rajendhren100% (1)
- PKCS#11 Wrapper For Java: From IAIKDocument5 pagesPKCS#11 Wrapper For Java: From IAIKbog495No ratings yet
- Power ScrewsDocument10 pagesPower ScrewsamanggayamNo ratings yet
- H500 SA2500 Spectrum Analyzer Datasheet 1Document12 pagesH500 SA2500 Spectrum Analyzer Datasheet 1pott_81No ratings yet
- Six Leg Kinematic Moving MachineDocument12 pagesSix Leg Kinematic Moving MachineShubham Bonde100% (1)
- C Örenkleri̇Document49 pagesC Örenkleri̇özcan TebişoğluNo ratings yet
- New Ceragon MW Product IP10Document94 pagesNew Ceragon MW Product IP10darpeshshahNo ratings yet
- DeoxIT Brand Rosin Soldering Flux DS-RSF-R80Document2 pagesDeoxIT Brand Rosin Soldering Flux DS-RSF-R80jotapinzonNo ratings yet
- CPF and UPFDocument20 pagesCPF and UPFNithiN kommiNeNi100% (1)
- Indique Law Journal GuidelinesDocument12 pagesIndique Law Journal GuidelinesAryan MewadaNo ratings yet
- Green Building Certification in Nigeria - A Comparative StudyDocument8 pagesGreen Building Certification in Nigeria - A Comparative StudyBuzz Buddy100% (1)
- Baseplates OptionsDocument4 pagesBaseplates Optionsalexmuchmure2158No ratings yet
- VLAN Ip SubnetDocument3 pagesVLAN Ip SubnetVane Duarte GonzalezNo ratings yet
- A Secure Foundation For Digital Transformation - IIoT by HoneywellDocument16 pagesA Secure Foundation For Digital Transformation - IIoT by Honeywellcbqucbqu100% (1)
- 01 Mobile GuidelinesDocument4 pages01 Mobile GuidelinesBharath BhushanNo ratings yet
- Alcatel Evolium 9100Document12 pagesAlcatel Evolium 9100Jawad KhanNo ratings yet
- Iprowe OverviewDocument27 pagesIprowe Overviewadityajobs88No ratings yet
- Rotary Screw CompressorDocument8 pagesRotary Screw Compressormanpreetsodhi08100% (2)
- Accenture Interview Questions & Answers.Document4 pagesAccenture Interview Questions & Answers.Badri Raj Ar Royal100% (2)
- 175 012200 PDFDocument2 pages175 012200 PDFAbu Anas M.SalaheldinNo ratings yet
- V1000 Manual PDFDocument487 pagesV1000 Manual PDFMohammed SajidNo ratings yet
- Korando C. Usuario ManualDocument519 pagesKorando C. Usuario ManualEduardoNo ratings yet
- BRKMPL 3124Document129 pagesBRKMPL 3124abc123No ratings yet
- MOTOTRBO Workshop Training R24Document201 pagesMOTOTRBO Workshop Training R24David Pickering100% (1)
- LOTO NotesDocument12 pagesLOTO NotesShirishNo ratings yet
- DP CardReaders Wnt6-x64 1112 Vista-7-X64Document101 pagesDP CardReaders Wnt6-x64 1112 Vista-7-X64blindangleNo ratings yet
- RSP 1570 OmDocument50 pagesRSP 1570 OmnwescoNo ratings yet
- MEM 603 MINI Project Assessment - Noriah Sept 2017-Mac2018Document4 pagesMEM 603 MINI Project Assessment - Noriah Sept 2017-Mac2018Farrina AzizNo ratings yet
- Continental Railworks: Manual Installation - Operation - Parts - ServiceDocument85 pagesContinental Railworks: Manual Installation - Operation - Parts - ServicePatricia Lizeth Cossio ZuritaNo ratings yet