You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Air Compressor 1Document1 pageAir Compressor 1Israrul Haque AnsariNo ratings yet
- Ultima - Truly Superior, However You Look at It: The Unique Drive DesignDocument1 pageUltima - Truly Superior, However You Look at It: The Unique Drive DesignIsrarul Haque AnsariNo ratings yet
- Ultima Redefines Efficiency: Ultima Delivers On Every LevelDocument1 pageUltima Redefines Efficiency: Ultima Delivers On Every LevelIsrarul Haque AnsariNo ratings yet
- Premium Efficiency Airends: Highest Efficiency Levels Throughout The Life of The CompressorDocument2 pagesPremium Efficiency Airends: Highest Efficiency Levels Throughout The Life of The CompressorIsrarul Haque AnsariNo ratings yet
- Air Compressor 3Document1 pageAir Compressor 3Israrul Haque AnsariNo ratings yet
- Air Compressor 1Document1 pageAir Compressor 1Israrul Haque AnsariNo ratings yet
- Premium Efficiency Airends: Highest Efficiency Levels Throughout The Life of The CompressorDocument2 pagesPremium Efficiency Airends: Highest Efficiency Levels Throughout The Life of The CompressorIsrarul Haque AnsariNo ratings yet
- Battery Power Safe OPZsDocument2 pagesBattery Power Safe OPZsIsrarul Haque Ansari100% (1)
- Ultima - Truly Superior, However You Look at It: The Unique Drive DesignDocument1 pageUltima - Truly Superior, However You Look at It: The Unique Drive DesignIsrarul Haque AnsariNo ratings yet
- Ultima - The Real Deal: Delivering Significant Increases in Efficiency and Exceeding Environmental TargetsDocument1 pageUltima - The Real Deal: Delivering Significant Increases in Efficiency and Exceeding Environmental TargetsIsrarul Haque AnsariNo ratings yet
- Revolutionary Energy Efficiency: Ultima U75 - U160Document8 pagesRevolutionary Energy Efficiency: Ultima U75 - U160Israrul Haque AnsariNo ratings yet
- SAES Company Profile PDFDocument14 pagesSAES Company Profile PDFIsrarul Haque AnsariNo ratings yet
- Ultima Redefines Efficiency: Ultima Delivers On Every LevelDocument1 pageUltima Redefines Efficiency: Ultima Delivers On Every LevelIsrarul Haque AnsariNo ratings yet
- Earthing System - WikipediaDocument13 pagesEarthing System - WikipediaIsrarul Haque AnsariNo ratings yet
- Absolyte Energy PDFDocument12 pagesAbsolyte Energy PDFIsrarul Haque AnsariNo ratings yet
- SEM Hand BookDocument203 pagesSEM Hand BookkrishnamanikandanNo ratings yet
- 139 Broschyr Osp - HC PDFDocument2 pages139 Broschyr Osp - HC PDFIsrarul Haque AnsariNo ratings yet
- Safety and Security DirectivesDocument129 pagesSafety and Security DirectivesIsrarul Haque AnsariNo ratings yet
- Gaps Suidelines For Stationary BatteriesDocument12 pagesGaps Suidelines For Stationary BatteriesIsrarul Haque AnsariNo ratings yet
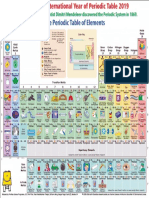
- Periodic TableDocument1 pagePeriodic TableIsrarul Haque Ansari67% (3)
- New Periodic Table PDFDocument1 pageNew Periodic Table PDFIsrarul Haque AnsariNo ratings yet
- Module 1Document52 pagesModule 1Israrul Haque AnsariNo ratings yet
- Transformer Paint SpecificationDocument6 pagesTransformer Paint SpecificationIsrarul Haque AnsariNo ratings yet
- Advance Generator Earth Fault ProtectionDocument21 pagesAdvance Generator Earth Fault ProtectionIsrarul Haque AnsariNo ratings yet
- Advance Generator Earth Fault ProtectionDocument21 pagesAdvance Generator Earth Fault ProtectionIsrarul Haque AnsariNo ratings yet
- Rotor Earth-Fault Protection With Injection Unit Rxtte4 and Reg670Document16 pagesRotor Earth-Fault Protection With Injection Unit Rxtte4 and Reg670fuertedementeNo ratings yet
- Prysmian Cable CatalogueDocument2 pagesPrysmian Cable CatalogueIsrarul Haque Ansari100% (1)
- VLF FaqDocument4 pagesVLF FaqsofyanshahNo ratings yet
- A Guide To Transformer Oil Analysis: BY I.A.R. GRAY Transformer Chemistry ServicesDocument12 pagesA Guide To Transformer Oil Analysis: BY I.A.R. GRAY Transformer Chemistry ServicesAnonymous OCDJg17Z100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PETROM Asset IntegrityDocument18 pagesPETROM Asset Integrityghostforever0No ratings yet
- Trumatic S 3002 KDocument28 pagesTrumatic S 3002 KosemberNo ratings yet
- Welding Procedure SpecificationDocument12 pagesWelding Procedure Specificationsanjay sharmaNo ratings yet
- Viewbill 02062019 080313Document1 pageViewbill 02062019 080313dinesh sharmaNo ratings yet
- Panel Solar 200w MonoDocument2 pagesPanel Solar 200w MonoOscar Eduardo Salazar SánchezNo ratings yet
- Le Unigear Zs1 BTB Reva 1vcp000275Document2 pagesLe Unigear Zs1 BTB Reva 1vcp000275hizbi7No ratings yet
- KSCY, LGCY, KSZJ Manual BookDocument62 pagesKSCY, LGCY, KSZJ Manual BookJustice Machiwana100% (3)
- Hyosung PlanetDocument8 pagesHyosung PlanetErcan BAYRAKCINo ratings yet
- AHU Instalation Manual YorkDocument36 pagesAHU Instalation Manual YorkBangto Yibsip50% (2)
- Power Plants: CH 6 Economics of Power Plants: Amer Al-AniDocument15 pagesPower Plants: CH 6 Economics of Power Plants: Amer Al-Anitarikayehu amanuelNo ratings yet
- Hyd Actua Device070110 1Document6 pagesHyd Actua Device070110 1Ashish SinglaNo ratings yet
- Argentina-World Development IndicatorsDocument522 pagesArgentina-World Development IndicatorsbodyfullNo ratings yet
- Adb DCSDocument2 pagesAdb DCSRocky SinghNo ratings yet
- Smart Grid and Energy Management PDFDocument19 pagesSmart Grid and Energy Management PDFEng_Mennat_AllahNo ratings yet
- PGCB W1 Vol 2 of 2 (IDA Cleared-Track Change 9.12.2015) Final-3 PDFDocument401 pagesPGCB W1 Vol 2 of 2 (IDA Cleared-Track Change 9.12.2015) Final-3 PDFparameshvkrNo ratings yet
- Fayez AL-Ahmadi Resume Jan24Document3 pagesFayez AL-Ahmadi Resume Jan24Fayez Al-ahmadiNo ratings yet
- CSeries 3516 Gas Compression Package English A4Document8 pagesCSeries 3516 Gas Compression Package English A4Anonymous LfeGI2hMNo ratings yet
- Iesco Online BillDocument2 pagesIesco Online Billengr.saifyounusNo ratings yet
- 1410080-5 HP Floating AeratorDocument12 pages1410080-5 HP Floating AeratorAbhinav SrivastavaNo ratings yet
- Feasibility Study of Ethanol ProductionDocument6 pagesFeasibility Study of Ethanol ProductionIntratec SolutionsNo ratings yet
- An Introduction To Power Quality: Hossein Mahdinia RoudsariDocument53 pagesAn Introduction To Power Quality: Hossein Mahdinia Roudsaribiji_fhNo ratings yet
- Anti Vibration PadsDocument5 pagesAnti Vibration PadsNikhil RajanNo ratings yet
- The Tamil Nadu Lifts Act, 1997Document13 pagesThe Tamil Nadu Lifts Act, 1997roy_vijayNo ratings yet
- GeneratorsCatalogue2013 EN LR Rev.1 PDFDocument56 pagesGeneratorsCatalogue2013 EN LR Rev.1 PDFxp234100% (1)
- Oil & Gas AccountingDocument4 pagesOil & Gas AccountingFolakemi OgunyemiNo ratings yet
- Accidents in WTGDocument112 pagesAccidents in WTGbidyadharNo ratings yet
- Model P155: Stainless SteelDocument2 pagesModel P155: Stainless SteelJavi KatzNo ratings yet
- Sanken Regulator-ICs-Catalog PDFDocument119 pagesSanken Regulator-ICs-Catalog PDFJoseni FigueiredoNo ratings yet
- ProposalDocument6 pagesProposalahmad muzniNo ratings yet
- Natural Gas Hedging For End UsersDocument5 pagesNatural Gas Hedging For End UsersMercatus Energy AdvisorsNo ratings yet