You might also like
- Change of Variables in A Double IntegralDocument12 pagesChange of Variables in A Double IntegralTom JonesNo ratings yet
- Discrete Series of GLn Over a Finite Field. (AM-81), Volume 81From EverandDiscrete Series of GLn Over a Finite Field. (AM-81), Volume 81No ratings yet
- Triple Int16 8Document7 pagesTriple Int16 8Nikoli MajorNo ratings yet
- MA111 Lec7 D3D4Document20 pagesMA111 Lec7 D3D4pahnhnykNo ratings yet
- The Jacobian of A Transformation 2Document4 pagesThe Jacobian of A Transformation 2Ankur Singh100% (1)
- Sample Solutions To Practice Problems For Exam I: Math 11 Fall 2007 October 17, 2008Document27 pagesSample Solutions To Practice Problems For Exam I: Math 11 Fall 2007 October 17, 2008haroldoNo ratings yet
- PageNo 7 14 Parthivi SinghDocument2 pagesPageNo 7 14 Parthivi SinghManas HiremathNo ratings yet
- Intro To SWE Textbook1Document9 pagesIntro To SWE Textbook1AKNo ratings yet
- Lecture 10Document3 pagesLecture 10ThetaOmegaNo ratings yet
- Gatapov 2005Document8 pagesGatapov 2005KorcaNo ratings yet
- Grad Curl Div Lap CurvilinearDocument7 pagesGrad Curl Div Lap CurvilinearhelmkriegNo ratings yet
- 2021 Geometry Study Guide 2 PDFDocument23 pages2021 Geometry Study Guide 2 PDFTaffohouo Nwaffeu Yves ValdezNo ratings yet
- Mathmatical PhysicsDocument7 pagesMathmatical PhysicsMr. DILLUNo ratings yet
- Integral TheoremDocument11 pagesIntegral Theorempqrabc22No ratings yet
- JACOBIANDocument14 pagesJACOBIANŞįśirŚärķeŕNo ratings yet
- Adaptive Image Reconstruction Using Information MeasuresDocument18 pagesAdaptive Image Reconstruction Using Information MeasuresDKSNo ratings yet
- TopicsDocument41 pagesTopicsJoshuaHaimMamouNo ratings yet
- Pde CaracteristicasDocument26 pagesPde CaracteristicasAnonymous Vd26Pzpx80No ratings yet
- Geometry A1 Chapter 2Document23 pagesGeometry A1 Chapter 2Ngo Anh ThuNo ratings yet
- Lecture 09 - Differential Structures: The Pivotal Concept of Tangent Vector Spaces (Schuller's Geometric Anatomy of Theoretical Physics)Document10 pagesLecture 09 - Differential Structures: The Pivotal Concept of Tangent Vector Spaces (Schuller's Geometric Anatomy of Theoretical Physics)Simon Rea100% (1)
- Parameterized Surfaces Parameterized SurfaceDocument3 pagesParameterized Surfaces Parameterized SurfaceRajNo ratings yet
- Geometry Chapter1Document17 pagesGeometry Chapter1Abdellatif denineNo ratings yet
- Physics 2. Electromagnetism: 1 FieldsDocument9 pagesPhysics 2. Electromagnetism: 1 FieldsOsama HassanNo ratings yet
- Vector SpacesDocument10 pagesVector SpacesAbsensi RidwanNo ratings yet
- Derivation of The Lorenz EquationsDocument3 pagesDerivation of The Lorenz EquationsSteven ScottNo ratings yet
- The Jacobian and Change of VariablesDocument6 pagesThe Jacobian and Change of VariablesnahuacevedoNo ratings yet
- ME 563 - Intermediate Fluid Dynamics - Su: Lecture 29 - Waves: More BasicsDocument5 pagesME 563 - Intermediate Fluid Dynamics - Su: Lecture 29 - Waves: More Basicszcap excelNo ratings yet
- Solution For Chapter 23: T T' P T' T T' T PDocument8 pagesSolution For Chapter 23: T T' P T' T T' T PSveti JeronimNo ratings yet
- Lecture 13Document7 pagesLecture 13Aditya PatoliyaNo ratings yet
- Practice Midterm SolutionsDocument5 pagesPractice Midterm Solutions3dd2ef652ed6f7No ratings yet
- Special Evolution Lima PeruDocument43 pagesSpecial Evolution Lima PeruKaren VjNo ratings yet
- Multiple View Geometry: Exercise Sheet 10Document2 pagesMultiple View Geometry: Exercise Sheet 10Vard FarrellNo ratings yet
- Halmiltonian Elliptic SystemsDocument22 pagesHalmiltonian Elliptic SystemsMarcelo OliveiraNo ratings yet
- Diff NotesDocument10 pagesDiff Notesomsaiboggala811No ratings yet
- Partial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019Document16 pagesPartial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019PLeaseNo ratings yet
- Topic 2Document9 pagesTopic 2HENRY ZULUNo ratings yet
- Phys 333 HW1Document2 pagesPhys 333 HW1MTNo ratings yet
- Mary L Boas Edisi 3 Bab5 Integral PermukaanDocument7 pagesMary L Boas Edisi 3 Bab5 Integral Permukaansel viaNo ratings yet
- Surfaces and Surfaces IntegralsDocument8 pagesSurfaces and Surfaces IntegralsYousaf Anwar KhanNo ratings yet
- (Calculus Oxford) Problem Sheet 06Document2 pages(Calculus Oxford) Problem Sheet 06AnyNo ratings yet
- Caltech Vector Calculus 7Document8 pagesCaltech Vector Calculus 7nislam57No ratings yet
- Part Iii: Functions From R TorDocument14 pagesPart Iii: Functions From R TorTeresa Villena GonzálezNo ratings yet
- On Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorsDocument12 pagesOn Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorshungkgNo ratings yet
- Exact Solutions of The Space-Time Fractional EqualDocument7 pagesExact Solutions of The Space-Time Fractional EqualAreesha NoorNo ratings yet
- Metric Spaces: 1.1 Definition and ExamplesDocument103 pagesMetric Spaces: 1.1 Definition and ExamplesNguyễn Quang HuyNo ratings yet
- 1 Directional Derivatives and The Gradient VectorDocument8 pages1 Directional Derivatives and The Gradient VectorThùy Dung TrầnNo ratings yet
- Rel Lecture5Document8 pagesRel Lecture5zcap excelNo ratings yet
- Integration by A Change of VariablesDocument3 pagesIntegration by A Change of VariablesRajNo ratings yet
- Lec 26Document5 pagesLec 26110 RCCNo ratings yet
- Info 159/259 HW 2Document3 pagesInfo 159/259 HW 2Yvonne Yifan ZhouNo ratings yet
- Introduction To Manifolds - Solutions To Selected Homework ProblemsDocument8 pagesIntroduction To Manifolds - Solutions To Selected Homework ProblemsVladimir EgorovNo ratings yet
- Bona Wu InviscidDocument14 pagesBona Wu Inviscidhaifa ben fredjNo ratings yet
- 2014 Lecture 005 PDFDocument48 pages2014 Lecture 005 PDFeouahiauNo ratings yet
- MA 201 (2019) - PDE-Lecture-3Document19 pagesMA 201 (2019) - PDE-Lecture-3Beetu MaanNo ratings yet
- Lu 2017Document5 pagesLu 2017Padma KNo ratings yet
- Measuring Lengths - The First Fundamental Form: X U X VDocument8 pagesMeasuring Lengths - The First Fundamental Form: X U X VVasi UtaNo ratings yet
- 1d Condution (2013) Finite Volume MethodDocument55 pages1d Condution (2013) Finite Volume MethodHuyTqNo ratings yet
- Measuring Lengths - The First Fundamental Form: X U X VDocument11 pagesMeasuring Lengths - The First Fundamental Form: X U X VAngelika ErhardtNo ratings yet
- Orthogonal Curvilinear CoordinatesDocument16 pagesOrthogonal Curvilinear CoordinatesRoy VeseyNo ratings yet
- .Tl?K:Nitlfo - RQ: Looms LaidDocument1 page.Tl?K:Nitlfo - RQ: Looms LaidNguyen DuyNo ratings yet
- Cee 235a HWDocument1 pageCee 235a HWNguyen DuyNo ratings yet
- HG FT: HealthDocument1 pageHG FT: HealthNguyen DuyNo ratings yet
- Product Data: CH16NA 018 - 060 Single - Stage Heat Pump With Puronr RefrigerantDocument18 pagesProduct Data: CH16NA 018 - 060 Single - Stage Heat Pump With Puronr RefrigerantNguyen DuyNo ratings yet
- htiteetdkt (: FSKF Wa TFDocument1 pagehtiteetdkt (: FSKF Wa TFNguyen DuyNo ratings yet
- WWW.M: 2.2. A Number of Moment-Curvature Analyses Were Carried Out For Circular Concrete SectionsDocument1 pageWWW.M: 2.2. A Number of Moment-Curvature Analyses Were Carried Out For Circular Concrete SectionsNguyen DuyNo ratings yet
- Cee 235a HWDocument1 pageCee 235a HWNguyen DuyNo ratings yet
- 4a. Nonlinear Structural Analysis For Seismic Design - Spring 2018 - v2Document30 pages4a. Nonlinear Structural Analysis For Seismic Design - Spring 2018 - v2Nguyen DuyNo ratings yet
- Cee 235a HWDocument21 pagesCee 235a HWNguyen DuyNo ratings yet
- CEE 241 Notes IV PDFDocument93 pagesCEE 241 Notes IV PDFNguyen DuyNo ratings yet
- CEE 241 Notes IIIDocument58 pagesCEE 241 Notes IIINguyen DuyNo ratings yet
- Cee 235a HW 5Document9 pagesCee 235a HW 5Nguyen DuyNo ratings yet
- Genuine Parts: Description: Application: Part Number: Kit Contents: Item Qty. Service Part Number Part DescriptionDocument10 pagesGenuine Parts: Description: Application: Part Number: Kit Contents: Item Qty. Service Part Number Part DescriptionNguyen DuyNo ratings yet
- Bonus Project: (Due On Friday, Dec 22, 11:55PM)Document2 pagesBonus Project: (Due On Friday, Dec 22, 11:55PM)Nguyen DuyNo ratings yet
- 4b. Nonlinear Structural Analysis For Seismic Design - Spring 2018Document42 pages4b. Nonlinear Structural Analysis For Seismic Design - Spring 2018Nguyen DuyNo ratings yet
- Graph of 2.2B: Ei Ei/Eig Ei Ei/Eig Ratio 0.01 Nu/Agf'C Ratio 0.03Document1 pageGraph of 2.2B: Ei Ei/Eig Ei Ei/Eig Ratio 0.01 Nu/Agf'C Ratio 0.03Nguyen DuyNo ratings yet
- 4a. Nonlinear Structural Analysis For Seismic Design - Spring 2018 - v2Document30 pages4a. Nonlinear Structural Analysis For Seismic Design - Spring 2018 - v2Nguyen DuyNo ratings yet
- MATLAB Functions For Common Probability DistributionsDocument6 pagesMATLAB Functions For Common Probability DistributionsNguyen DuyNo ratings yet
- Problem 1 - Function y (T) : y (T) - 0.5+2 e y (T) - 0.5+e y (T) - 0.5+3 eDocument1 pageProblem 1 - Function y (T) : y (T) - 0.5+2 e y (T) - 0.5+e y (T) - 0.5+3 eNguyen DuyNo ratings yet
- Perform 3D - FEMA Beam ExampleDocument3 pagesPerform 3D - FEMA Beam ExampleNguyen DuyNo ratings yet
- Smartphone Disaster Apps PDFDocument3 pagesSmartphone Disaster Apps PDFNguyen DuyNo ratings yet
- Esr 3912Document10 pagesEsr 3912Nguyen DuyNo ratings yet
- A004 Anaheim Plaza Reconstruction: Underground - Middle StructureDocument1 pageA004 Anaheim Plaza Reconstruction: Underground - Middle StructureNguyen DuyNo ratings yet
- CEE239 HW4 Problem4cDocument1 pageCEE239 HW4 Problem4cNguyen DuyNo ratings yet
- HW1 Problem4 c2Document1 pageHW1 Problem4 c2Nguyen DuyNo ratings yet
- Using Your CM Storm Quick Fire TK Keyboard: Accessing Advanced FunctionsDocument2 pagesUsing Your CM Storm Quick Fire TK Keyboard: Accessing Advanced FunctionsNguyen DuyNo ratings yet
- Samsung 22PDocument18 pagesSamsung 22PNguyen DuyNo ratings yet
- A003 Anaheim Plaza Reconstruction: Underground - North AnchorDocument1 pageA003 Anaheim Plaza Reconstruction: Underground - North AnchorNguyen DuyNo ratings yet
- Unit-3 DC Machines IMP QuestionsDocument30 pagesUnit-3 DC Machines IMP Questionskrishna Sai Atla VenkataNo ratings yet
- Maharashtra Brochure (2023)Document4 pagesMaharashtra Brochure (2023)assmexellenceNo ratings yet
- Weichai WP10 Euro IIIDocument35 pagesWeichai WP10 Euro IIIBakery HamzaNo ratings yet
- Research Papers On Climate Change Global WarmingDocument4 pagesResearch Papers On Climate Change Global Warminggw1nm9nbNo ratings yet
- Cigarettes and AlcoholDocument1 pageCigarettes and AlcoholHye Jin KimNo ratings yet
- Method Statement - Refrigerant PipingDocument7 pagesMethod Statement - Refrigerant PipingGirithar M SundaramNo ratings yet
- Correlation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingDocument101 pagesCorrelation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingpritamNo ratings yet
- (Q2) Electrochemistry 29th JulyDocument21 pages(Q2) Electrochemistry 29th JulySupritam KunduNo ratings yet
- EOCR 종합 EN 2015 PDFDocument228 pagesEOCR 종합 EN 2015 PDFShubhankar KunduNo ratings yet
- AD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveDocument16 pagesAD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveThiago RaulinoNo ratings yet
- Atlantis Is Discovered - Atlantis in Middle Danubian Depression (Pannonian Basin) A New Location of Atlantis IslandDocument31 pagesAtlantis Is Discovered - Atlantis in Middle Danubian Depression (Pannonian Basin) A New Location of Atlantis Islandpaulct2004721260% (10)
- Bahir Dar NDP UDP - Final ReportDocument188 pagesBahir Dar NDP UDP - Final ReportWorkuMamo100% (1)
- Sorsogon State College Engineering & ArchitectureDocument11 pagesSorsogon State College Engineering & ArchitectureArianne Mae De Vera GallonNo ratings yet
- Asme Code Qualification of Pipe Bends With Localized Wall Thinning PDFDocument8 pagesAsme Code Qualification of Pipe Bends With Localized Wall Thinning PDFZhiqiang GuNo ratings yet
- AT2H - Basics - Symbolism in HinduismDocument28 pagesAT2H - Basics - Symbolism in Hinduismapi-3764210No ratings yet
- Brenda Patton Guided Reflection QuestionsDocument3 pagesBrenda Patton Guided Reflection QuestionsCameron JanzenNo ratings yet
- 300.91C - Fire Alarm System Pre-Test and Acceptance Test Checklist 3-27-14Document2 pages300.91C - Fire Alarm System Pre-Test and Acceptance Test Checklist 3-27-14mthuyaNo ratings yet
- Band Structure Engineering in Gallium Sulfde NanostructuresDocument9 pagesBand Structure Engineering in Gallium Sulfde NanostructuresucimolfettaNo ratings yet
- MicrosoftDynamicsNAVAdd OnsDocument620 pagesMicrosoftDynamicsNAVAdd OnsSadiq QudduseNo ratings yet
- Toolbox Talks Working at Elevations English 1Document1 pageToolbox Talks Working at Elevations English 1AshpakNo ratings yet
- Reproduction WorksheetDocument5 pagesReproduction WorksheetJENY VEV GAYOMANo ratings yet
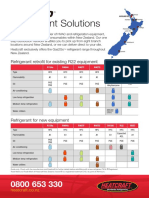
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocument2 pagesRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNo ratings yet
- HorticultureDocument168 pagesHorticultureagni sahanaNo ratings yet
- Sample Design Calculations For Block Found. For Vib. Equip.Document17 pagesSample Design Calculations For Block Found. For Vib. Equip.Adam Michael GreenNo ratings yet
- Lion's Path - Charles MuseeDocument57 pagesLion's Path - Charles MuseeBob Sagat75% (4)
- Local AnesthesiaDocument55 pagesLocal AnesthesiaAhmed MagdyNo ratings yet
- Free Non Veg Nutrition Plan YSF PDFDocument8 pagesFree Non Veg Nutrition Plan YSF PDFAbhilash Wasekar100% (1)
- Driver DST-4812 For 7.2 KG CMDocument5 pagesDriver DST-4812 For 7.2 KG CMWWW.150775.BUGME.PWNo ratings yet
- Electrical BOQ 07.12.2021 New Boq R4 05-01-2022 Final 16.02.2022Document92 pagesElectrical BOQ 07.12.2021 New Boq R4 05-01-2022 Final 16.02.2022Upendra ChariNo ratings yet
- Atlas-Complejidad Económica PDFDocument362 pagesAtlas-Complejidad Económica PDFRafael QuiñonesNo ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeRating: 5 out of 5 stars5/5 (1)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (80)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)From EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No ratings yet