You might also like
- Tubular JointsDocument21 pagesTubular Jointsandybroad100% (1)
- Lecture 15A.7-Tubular Joints in Offshore StructuresDocument23 pagesLecture 15A.7-Tubular Joints in Offshore StructuresLinh TranNo ratings yet
- 38 1 011-FundamentalsOfBeamBracing-YuraDocument16 pages38 1 011-FundamentalsOfBeamBracing-YuraengxyzNo ratings yet
- 2 Tension MembersDocument13 pages2 Tension MembersAbel MulugetaNo ratings yet
- Chapter Three - TorsionDocument34 pagesChapter Three - Torsioneyuleme146No ratings yet
- Fundamentals of Beam Bracing 1Document16 pagesFundamentals of Beam Bracing 1sunny171083_90123592No ratings yet
- Fundamentals of Beam BracingDocument16 pagesFundamentals of Beam Bracingofingjbrm100% (1)
- Steel Structures-Tension Members-1Document14 pagesSteel Structures-Tension Members-1Ceren ŞirinNo ratings yet
- Chapter Two, Tension Members PDFDocument10 pagesChapter Two, Tension Members PDFZeleke TaimuNo ratings yet
- Design of Beams in Structural SteelDocument15 pagesDesign of Beams in Structural SteelMaqsood92% (13)
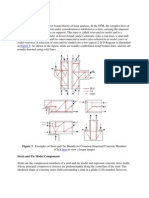
- Figure 1 Example of D-Regions in A Common Building StructureDocument13 pagesFigure 1 Example of D-Regions in A Common Building StructureCristobal Jimenez MuchoNo ratings yet
- Chapter 1-Deep Beam & Corbel 2Document37 pagesChapter 1-Deep Beam & Corbel 2Helen Negash100% (4)
- Nodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedDocument9 pagesNodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedPrasanth NairNo ratings yet
- Reinforced Concrete Design BS 8110Document15 pagesReinforced Concrete Design BS 8110Kutty Mansoor75% (4)
- Rule of Thumb For RC DesignDocument12 pagesRule of Thumb For RC DesignJeefry Arranguez50% (2)
- Fluxura PDFDocument17 pagesFluxura PDFjohnjabarajNo ratings yet
- Fundamentals of Beam Bracing Yura: Related PapersDocument17 pagesFundamentals of Beam Bracing Yura: Related PapersM MushtaqNo ratings yet
- RCD ObjectivesDocument3 pagesRCD ObjectivesiamcerbzjrNo ratings yet
- Design of Steel Structure BeamDocument17 pagesDesign of Steel Structure BeamShahrah ManNo ratings yet
- Torsional Analysis of Steel MembersDocument6 pagesTorsional Analysis of Steel MembersSebastiao SilveiraNo ratings yet
- Hollow Sections ConnectionsDocument4 pagesHollow Sections Connectionsאחמד סלאח כאמלNo ratings yet
- (12302945 - Archives of Civil Engineering) Design of Hollow Section Overlap Joints With Reinforcing Rib Plate. Joint Resistance PDFDocument14 pages(12302945 - Archives of Civil Engineering) Design of Hollow Section Overlap Joints With Reinforcing Rib Plate. Joint Resistance PDFAhmed Pshtiwan AhmedNo ratings yet
- RCC Lecture Series 4 2018-19Document33 pagesRCC Lecture Series 4 2018-19Mansa ArthurNo ratings yet
- Design and Behavior of Deep BeamsDocument27 pagesDesign and Behavior of Deep BeamsniroNo ratings yet
- Bolt Joint - The ChallengeDocument37 pagesBolt Joint - The ChallengeThái Đạo Phạm LêNo ratings yet
- Chapter 2 - Tension MembersDocument13 pagesChapter 2 - Tension MembersSami IGNo ratings yet
- Cyclic Deformation Capacity, Resistance and Effective Stiffness of RC Members With or Without RetrofittingDocument8 pagesCyclic Deformation Capacity, Resistance and Effective Stiffness of RC Members With or Without RetrofittingDave WelchNo ratings yet
- Behaviour and Stability of Double Coped Beam To Girder Connections Under Combined LoadingDocument12 pagesBehaviour and Stability of Double Coped Beam To Girder Connections Under Combined LoadingKLNo ratings yet
- 6.0 Beams & Shafts PDFDocument10 pages6.0 Beams & Shafts PDFLEONARD NYIRONGONo ratings yet
- Box Girder Analysis MethodsDocument12 pagesBox Girder Analysis Methodssujups100% (1)
- MODULO 3 Carlo MonsalveDocument14 pagesMODULO 3 Carlo Monsalvecarlomonsalve1No ratings yet
- Aircraft Structures Course OverviewDocument42 pagesAircraft Structures Course OverviewShwetha BhatNo ratings yet
- Lecture - 1Document19 pagesLecture - 1Chala Giduma WakjiraNo ratings yet
- Design reinforced concrete beams ULS bending axial forceDocument84 pagesDesign reinforced concrete beams ULS bending axial forcepetermacNo ratings yet
- CIVE 302 - Lab 1 - Tensile Testing of Steel PDFDocument9 pagesCIVE 302 - Lab 1 - Tensile Testing of Steel PDFAhmadAliAKbarPhambraNo ratings yet
- STRUT AND TIE MODELLING BACKGROUND AND NEW AS 3600 PROVISIONSDocument27 pagesSTRUT AND TIE MODELLING BACKGROUND AND NEW AS 3600 PROVISIONSVincent Teng100% (1)
- Module3 Design of Tension MembersDocument33 pagesModule3 Design of Tension MembersPrem KumarNo ratings yet
- Design of Beam For TorsionDocument14 pagesDesign of Beam For TorsionmehrdadNo ratings yet
- Analysis - Design of BeamsDocument67 pagesAnalysis - Design of BeamsAnwaar SafdarNo ratings yet
- Treatment of Anchorage of Main Bars in Reinforced Concrete by Codes of Practice - A Critical Review (Part One: Straight Bar Anchorages)Document19 pagesTreatment of Anchorage of Main Bars in Reinforced Concrete by Codes of Practice - A Critical Review (Part One: Straight Bar Anchorages)Govind GauravNo ratings yet
- Steel Unit 1 QBDocument30 pagesSteel Unit 1 QBKarnakar ReddyNo ratings yet
- Article: Connecting Hollow Structural Section Members With Through-BoltsDocument4 pagesArticle: Connecting Hollow Structural Section Members With Through-BoltsRoNo ratings yet
- Civil EngineeringDocument10 pagesCivil EngineeringMudasir HussainNo ratings yet
- Aircraft Structures - 2 Basic FieldDocument42 pagesAircraft Structures - 2 Basic FieldVenkat Athmanathan100% (1)
- Unit-1 Principal Stresses Theories of FailureDocument29 pagesUnit-1 Principal Stresses Theories of FailureNarender NarruNo ratings yet
- (Kiot) : Design of Steel and Timber StructureDocument53 pages(Kiot) : Design of Steel and Timber Structurebini1221No ratings yet
- Strut and Tie LectureDocument9 pagesStrut and Tie LectureNAUTILUS87No ratings yet
- Torsional StressesDocument48 pagesTorsional StressesKory EstesNo ratings yet
- Design of Steel Elements For Axial Compression To Ec3 2 1Document7 pagesDesign of Steel Elements For Axial Compression To Ec3 2 1Victor OmotoriogunNo ratings yet
- Steel Structures Tension Members 2Document24 pagesSteel Structures Tension Members 2Nafi AykutNo ratings yet
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 2.5 out of 5 stars2.5/5 (4)
- The Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryFrom EverandThe Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryNo ratings yet
- Strength of Materials: An Introduction to the Analysis of Stress and StrainFrom EverandStrength of Materials: An Introduction to the Analysis of Stress and StrainRating: 5 out of 5 stars5/5 (1)
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- MillingDocument9 pagesMillingitiseasyNo ratings yet
- Lab_Guide_800363Document26 pagesLab_Guide_800363itiseasyNo ratings yet
- PemaDocument6 pagesPemaitiseasyNo ratings yet
- 2021 SAV 01 Pass4Document1 page2021 SAV 01 Pass4itiseasyNo ratings yet
- Flatness LaserDocument11 pagesFlatness LaseritiseasyNo ratings yet
- 2021 SAV 01 Pass2Document1 page2021 SAV 01 Pass2itiseasyNo ratings yet
- Jigs and Fixtures JoshiDocument252 pagesJigs and Fixtures JoshiVikram Govindarajan83% (6)
- Made in ChinaDocument5 pagesMade in ChinaitiseasyNo ratings yet
- 2021 SAV 01 FinalDocument1 page2021 SAV 01 FinalitiseasyNo ratings yet
- ManualDocument44 pagesManualitiseasyNo ratings yet
- 2021 SAV 01 Pass3Document1 page2021 SAV 01 Pass3itiseasyNo ratings yet
- Modbus InfoDocument5 pagesModbus InfoitiseasyNo ratings yet
- 2021 SAV 01 Pass2Document1 page2021 SAV 01 Pass2itiseasyNo ratings yet
- Step by Step GuideDocument35 pagesStep by Step GuideitiseasyNo ratings yet
- Dynamic Finite Element MethodsDocument29 pagesDynamic Finite Element MethodsVns VnsNo ratings yet
- Lab 2Document6 pagesLab 2itiseasyNo ratings yet
- Contains Nonbinding Recommendations: March 2020Document14 pagesContains Nonbinding Recommendations: March 2020josephNo ratings yet
- Welding Positioner ManualDocument12 pagesWelding Positioner ManualitiseasyNo ratings yet
- Rockwell Hardness Tester GuideDocument16 pagesRockwell Hardness Tester GuideitiseasyNo ratings yet
- Chapter 14 Reference PlanesDocument11 pagesChapter 14 Reference PlanesitiseasyNo ratings yet
- Nbs Special Publication 394Document188 pagesNbs Special Publication 394itiseasyNo ratings yet
- La Ko Sure Unsa NiDocument3 pagesLa Ko Sure Unsa NiJeromeNo ratings yet
- DevelopmDocument8 pagesDevelopmitiseasyNo ratings yet
- Optimization of Material Removal Rate During Turning of SAE 1020 Material in CNC Lathe Using Taguchi TechniqueDocument8 pagesOptimization of Material Removal Rate During Turning of SAE 1020 Material in CNC Lathe Using Taguchi TechniqueitiseasyNo ratings yet
- La Ko Sure Unsa NiDocument3 pagesLa Ko Sure Unsa NiJeromeNo ratings yet
- Welding Galvanized SteelDocument6 pagesWelding Galvanized SteelmperelmuterNo ratings yet
- L 0800Document22 pagesL 0800itiseasyNo ratings yet
- Lecture 15A.7: Tubular Joints in Offshore StructuresDocument20 pagesLecture 15A.7: Tubular Joints in Offshore StructuresitiseasyNo ratings yet
- Price List 2017/2018Document6 pagesPrice List 2017/2018itiseasyNo ratings yet
- Arito U2Document92 pagesArito U2itiseasyNo ratings yet
- Jee FS MT-D 28-12-2023 JM PaperDocument16 pagesJee FS MT-D 28-12-2023 JM PaperbusinesspratssyyNo ratings yet
- Spontaneous Heating and Fire in Coal Mines: SciencedirectDocument13 pagesSpontaneous Heating and Fire in Coal Mines: SciencedirectTamil VananNo ratings yet
- Sop SopDocument12 pagesSop Soperic_agustianNo ratings yet
- Indc CCP 432Document182 pagesIndc CCP 432SteveAbonyiNo ratings yet
- Inter-Cell Interference Coordination For Control Channels in LTE Heterogeneous NetworksDocument13 pagesInter-Cell Interference Coordination For Control Channels in LTE Heterogeneous Networkssolarisan6No ratings yet
- Alexandra Elena Plesu (Bonet Ruiz) PHD ThesisDocument278 pagesAlexandra Elena Plesu (Bonet Ruiz) PHD ThesisThắng MinerNo ratings yet
- Gas - Liquid Mixing Impeller of New GenerationDocument8 pagesGas - Liquid Mixing Impeller of New GenerationscranderiNo ratings yet
- PGDCA I Semester Jan 2020Document19 pagesPGDCA I Semester Jan 2020sayal96amritNo ratings yet
- What Makes A Planet Habitable?Document3 pagesWhat Makes A Planet Habitable?Willie WilliowNo ratings yet
- Stress Corrosion Cracking in Stainless SteelDocument3 pagesStress Corrosion Cracking in Stainless Steelmavis16No ratings yet
- MAS TEST With AnswerDocument10 pagesMAS TEST With Answerjoneth.duenasNo ratings yet
- Schott Ky DiodesDocument3 pagesSchott Ky DiodesAmarnath M DamodaranNo ratings yet
- DECRYPTING PASSWORDS WITH JOHN THE RIPPERDocument10 pagesDECRYPTING PASSWORDS WITH JOHN THE RIPPERgemmo_fernandezNo ratings yet
- 3 Journal of Solid State Electrochemistry PDFDocument11 pages3 Journal of Solid State Electrochemistry PDFEDITORS CRC BOOKNo ratings yet
- Math 54 Exam 2 ReviewDocument11 pagesMath 54 Exam 2 ReviewBea DucaoNo ratings yet
- SOLO/UNISON/POLY/Octave Shift/Portamento: Settings Panel DescriptionsDocument1 pageSOLO/UNISON/POLY/Octave Shift/Portamento: Settings Panel Descriptionsanon_713757213No ratings yet
- Math 9 Review Package2020Document30 pagesMath 9 Review Package2020Tim DaiNo ratings yet
- Corrosion and Protection of Submarine Metal Components in SeawaterDocument4 pagesCorrosion and Protection of Submarine Metal Components in SeawaterSamuel GarciaNo ratings yet
- Company Wise Data Science Interview QuestionsDocument39 pagesCompany Wise Data Science Interview QuestionschaddiNo ratings yet
- GHDL Latest PDFDocument111 pagesGHDL Latest PDFArpanNo ratings yet
- Machine Elements Gear Drive AnalysisDocument6 pagesMachine Elements Gear Drive Analysiszangue billy jamesNo ratings yet
- Eobd FacileDocument22 pagesEobd FacileGabi NitaNo ratings yet
- Arraystorm Consolidated Product CatalogueDocument44 pagesArraystorm Consolidated Product Cataloguesuhasacharya117No ratings yet
- The Effect of Error Correction On Learners' Ability To Write AccuratelyDocument18 pagesThe Effect of Error Correction On Learners' Ability To Write AccuratelyWiqoyil IslamaNo ratings yet
- Course Syllabus Power System Analysis Lec. Lab.Document2 pagesCourse Syllabus Power System Analysis Lec. Lab.Monique OrugaNo ratings yet
- BROADLEAF 6 ManualDocument109 pagesBROADLEAF 6 ManualBaseCubica ArquitectosNo ratings yet
- Flow Separation or Boundary Layer Separation IsDocument4 pagesFlow Separation or Boundary Layer Separation Isengineer bilalNo ratings yet
- .Acc Config BackupDocument7 pages.Acc Config BackupFikri SyahputraNo ratings yet
- Using Manipulatives To Teach DecimalsDocument2 pagesUsing Manipulatives To Teach DecimalsfazamyNo ratings yet
- Date ValidationDocument9 pagesDate ValidationAnonymous 9B0VdTWiNo ratings yet