You might also like
- Developing Thinking in Geometry by Sue Johnston-Wilder, Professor John Mason PDFDocument285 pagesDeveloping Thinking in Geometry by Sue Johnston-Wilder, Professor John Mason PDFpietro265No ratings yet
- Supplement Undergraduate Level FEM TopicsDocument31 pagesSupplement Undergraduate Level FEM TopicsCenk AlınNo ratings yet
- Stress Strain TensorDocument13 pagesStress Strain TensorLight HouseNo ratings yet
- Action Research DSMDocument26 pagesAction Research DSMshahidshaikh76433% (3)
- MAE 156A Analysis of StressDocument46 pagesMAE 156A Analysis of StressAudrey TuNo ratings yet
- Soil Mechanics-9Document44 pagesSoil Mechanics-9Mo Kops100% (1)
- CE 181 Waves ch3Document16 pagesCE 181 Waves ch3Nick Jhonatan Moreno MorenoNo ratings yet
- 05-State of Stress in 3D 8.4.16 (8 Files Merged) PDFDocument347 pages05-State of Stress in 3D 8.4.16 (8 Files Merged) PDFChandra Bhushan Choubey100% (1)
- Module 2Document21 pagesModule 2Ghanshyam SahNo ratings yet
- Chapter 3 Waves in An Elastic Whole Space Equation of Motion of A SolidDocument16 pagesChapter 3 Waves in An Elastic Whole Space Equation of Motion of A SolidpaivensolidsnakeNo ratings yet
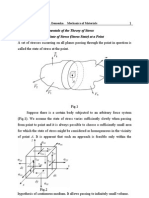
- LECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A PointDocument6 pagesLECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A Pointwinowich5813No ratings yet
- Stress Strain RelationsDocument22 pagesStress Strain Relationsmustafa1011No ratings yet
- Governing Equations For Fluid Motion: K W J V I U VDocument16 pagesGoverning Equations For Fluid Motion: K W J V I U VKelvin SudaniNo ratings yet
- Theory of PlatesDocument72 pagesTheory of PlatesGirish DeshmukhNo ratings yet
- 1 - Modelling of Soil Behaviour 16082020Document87 pages1 - Modelling of Soil Behaviour 16082020rihongkeeNo ratings yet
- Dynamics of A Rigid Body: DM D D DM DFDocument3 pagesDynamics of A Rigid Body: DM D D DM DFAlessio ScarabelliNo ratings yet
- 3-d ElasticityDocument40 pages3-d Elasticityp_sahoo8686No ratings yet
- 1 MatMomSim-3.0 & 3.1 Strong & Weak Forms 09dec2017 PDFDocument3 pages1 MatMomSim-3.0 & 3.1 Strong & Weak Forms 09dec2017 PDFعلي ماجد لفتهNo ratings yet
- Part 1Document29 pagesPart 1Boonme ChinnaboonNo ratings yet
- Wave Propagation in The Soil: Theoretical Background and Application To Traffic Induced VibrationsDocument14 pagesWave Propagation in The Soil: Theoretical Background and Application To Traffic Induced VibrationsLool BoxNo ratings yet
- Principles of MechanicsDocument29 pagesPrinciples of MechanicsengrasheedNo ratings yet
- Finite Element Method: 3.0 Fe Theory: General ContinuumDocument30 pagesFinite Element Method: 3.0 Fe Theory: General ContinuumEmre UysalNo ratings yet
- CE2112 Concepts of Stresses and Strains - 08082019Document26 pagesCE2112 Concepts of Stresses and Strains - 08082019Chen JianxiongNo ratings yet
- Basic Equations: 1 Definitions, Conventions and Basic RelationsDocument5 pagesBasic Equations: 1 Definitions, Conventions and Basic RelationsVinícius Martins FreireNo ratings yet
- Capitulo 4 - Elasticidad Bidimensional PDFDocument55 pagesCapitulo 4 - Elasticidad Bidimensional PDFCristian David BravoNo ratings yet
- BME18R311: Biofluids and DynamicsDocument32 pagesBME18R311: Biofluids and DynamicsEbe Nezer GNo ratings yet
- Equations of ChangeDocument58 pagesEquations of ChangePretty BabesNo ratings yet
- Chapter 1Document176 pagesChapter 1Shaina Mariz PanaliganNo ratings yet
- Plates and ShellDocument44 pagesPlates and ShellBryan RiveraNo ratings yet
- Nptel For Beam & ShellDocument10 pagesNptel For Beam & ShellmukeshmystNo ratings yet
- Nptel For Beam & Shell PDFDocument10 pagesNptel For Beam & Shell PDFmukeshmystNo ratings yet
- StressDocument3 pagesStressdamastergen326No ratings yet
- MEng6302 Lecture 3 Fundamental Concepts ASM 2022Document22 pagesMEng6302 Lecture 3 Fundamental Concepts ASM 2022Yared derejeNo ratings yet
- Aircraft Structural Analysis Full VersionDocument20 pagesAircraft Structural Analysis Full Versionpradeephit100% (1)
- Placas Planas CircularesDocument32 pagesPlacas Planas CircularessebastianmatiasNo ratings yet
- Chapter 7Document91 pagesChapter 7adnan.bunyNo ratings yet
- 5.0 Poisson - S Ratio and Theories of Failure (Updated)Document21 pages5.0 Poisson - S Ratio and Theories of Failure (Updated)Muhammad AdilNo ratings yet
- 3D - 2D Elasticity and FEA (13) - ADocument43 pages3D - 2D Elasticity and FEA (13) - AAhmad NaeemNo ratings yet
- Mecánica de Los Fluidos II.: Integración de Ecuaciones de Navier Stokes (Clase 2)Document50 pagesMecánica de Los Fluidos II.: Integración de Ecuaciones de Navier Stokes (Clase 2)josedevianaNo ratings yet
- BSL - Chapter 3Document60 pagesBSL - Chapter 3Cecilia CelineNo ratings yet
- Theory of Plates and ShellsDocument213 pagesTheory of Plates and Shellsआकाश संगीता प्रकाश पवार100% (2)
- TENSORDocument20 pagesTENSORhinduchanchal923No ratings yet
- in This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureDocument35 pagesin This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureKanti SolankiNo ratings yet
- MEng6302 Lecture 3 Fundamental Concepts ASM 2021Document22 pagesMEng6302 Lecture 3 Fundamental Concepts ASM 2021KKDhNo ratings yet
- Chapter 3: Equations of Change: 3.1 Total Mass BalanceDocument28 pagesChapter 3: Equations of Change: 3.1 Total Mass BalanceMohit YaduwanshiNo ratings yet
- MDP3530 Lecture 3Document23 pagesMDP3530 Lecture 3Mark Nassef NaguibNo ratings yet
- Wave Propagation in Plates of Anisotropic Media On The Basis Exact TheoryDocument8 pagesWave Propagation in Plates of Anisotropic Media On The Basis Exact TheoryMun ZiiNo ratings yet
- Paper Congress V3Document20 pagesPaper Congress V3Daniel OlmoNo ratings yet
- Mechanical Stress DefinitionDocument6 pagesMechanical Stress DefinitionhumejiasNo ratings yet
- NOTES Stress Strain STUDENTDocument5 pagesNOTES Stress Strain STUDENTAntonio MateosNo ratings yet
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNo ratings yet
- Ubit 4Document72 pagesUbit 4Divya SoodNo ratings yet
- Gusset DrawingsDocument59 pagesGusset DrawingssivaNo ratings yet
- Atmosphere Dynamics ch.1-4, by Prof.A.S.N.MurtyDocument27 pagesAtmosphere Dynamics ch.1-4, by Prof.A.S.N.MurtyPantulu MurtyNo ratings yet
- Ifem ch03Document13 pagesIfem ch03UmutNo ratings yet
- Stress Balance Principles 07 Boundary Problem PDFDocument5 pagesStress Balance Principles 07 Boundary Problem PDFshravanNo ratings yet
- CM LC1Document28 pagesCM LC1Eng W EaNo ratings yet
- Iso Plate Bending StiffnessDocument29 pagesIso Plate Bending StiffnesslapuNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- "Design Analysis and Weight Optimization of Gudgeon Pin": College of Engineering, Malegaon (BK.)Document3 pages"Design Analysis and Weight Optimization of Gudgeon Pin": College of Engineering, Malegaon (BK.)Pramod DhaigudeNo ratings yet
- Total Marks Out of (10 X No - of Expt.) PA Marks of Practical Converted According To T.E. Scheme (Max. Marks.)Document22 pagesTotal Marks Out of (10 X No - of Expt.) PA Marks of Practical Converted According To T.E. Scheme (Max. Marks.)Pramod DhaigudeNo ratings yet
- Chapter-1: Savitribai Phule Pune UniversityDocument68 pagesChapter-1: Savitribai Phule Pune UniversityPramod DhaigudeNo ratings yet
- D3a Ae4iDocument1 pageD3a Ae4iPramod DhaigudeNo ratings yet
- Acknowledgement: Prof. (DR.) S. S. Patil, Head, Department of Mechanical Engineering, SVPM's CollegeDocument8 pagesAcknowledgement: Prof. (DR.) S. S. Patil, Head, Department of Mechanical Engineering, SVPM's CollegePramod DhaigudeNo ratings yet
- Naresh SynopsisDocument8 pagesNaresh SynopsisPramod DhaigudeNo ratings yet
- WefDocument60 pagesWefPramod DhaigudeNo ratings yet
- SDGSDGDocument34 pagesSDGSDGPramod DhaigudeNo ratings yet
- State Common Entrance Test Cell: 1105 Prof. Ram Meghe Institute of Technology & Research, AmravatiDocument60 pagesState Common Entrance Test Cell: 1105 Prof. Ram Meghe Institute of Technology & Research, AmravatiPramod DhaigudeNo ratings yet
- State Common Entrance Test Cell: 1005 Sant Gadge Baba Amravati University, AmravatiDocument16 pagesState Common Entrance Test Cell: 1005 Sant Gadge Baba Amravati University, AmravatiPramod DhaigudeNo ratings yet
- Capr-Iii En1002 PDFDocument39 pagesCapr-Iii En1002 PDFPramod DhaigudeNo ratings yet
- 52 EfsdfDocument34 pages52 EfsdfPramod DhaigudeNo ratings yet
- State Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonDocument28 pagesState Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonPramod DhaigudeNo ratings yet
- State Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonDocument28 pagesState Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonPramod DhaigudeNo ratings yet
- State Common Entrance Test Cell: 1005 Sant Gadge Baba Amravati University, AmravatiDocument16 pagesState Common Entrance Test Cell: 1005 Sant Gadge Baba Amravati University, AmravatiPramod DhaigudeNo ratings yet
- State Common Entrance Test Cell: 1002 Government College of Engineering, AmravatiDocument40 pagesState Common Entrance Test Cell: 1002 Government College of Engineering, AmravatiPramod DhaigudeNo ratings yet
- RWDocument29 pagesRWPramod DhaigudeNo ratings yet
- State Common Entrance Test CellDocument35 pagesState Common Entrance Test CellPramod DhaigudeNo ratings yet
- QweDocument40 pagesQwePramod DhaigudeNo ratings yet
- Lva1 App6891 PDFDocument94 pagesLva1 App6891 PDFPramod DhaigudeNo ratings yet
- Difference Between Wideband Frequency Modulation and Narrowband Frequency ModulationDocument1 pageDifference Between Wideband Frequency Modulation and Narrowband Frequency ModulationPramod DhaigudeNo ratings yet
- Automobile Drag CoefficientsDocument5 pagesAutomobile Drag CoefficientsPramod DhaigudeNo ratings yet
- Difference Between Wideband Frequency Modulation and Narrowband Frequency ModulationDocument1 pageDifference Between Wideband Frequency Modulation and Narrowband Frequency ModulationPramod DhaigudeNo ratings yet
- Types of Drag On AircraftDocument20 pagesTypes of Drag On AircraftPramod DhaigudeNo ratings yet
- Advantages of FFT Spectrum Analyzer TechnologyDocument2 pagesAdvantages of FFT Spectrum Analyzer TechnologyPramod DhaigudeNo ratings yet
- Cross Power Spectral Density: Z T Which Is Sum of Two Real Jointly WSS Random ProcessesDocument8 pagesCross Power Spectral Density: Z T Which Is Sum of Two Real Jointly WSS Random ProcessesPramod DhaigudeNo ratings yet
- 8.1 Influence Coefficient Method: Are Static Forces On Discs 1, 2,, N Respectively, and X, X Are TheDocument4 pages8.1 Influence Coefficient Method: Are Static Forces On Discs 1, 2,, N Respectively, and X, X Are ThePramod DhaigudeNo ratings yet
- In Situ BalancingDocument1 pageIn Situ BalancingPramod DhaigudeNo ratings yet
- RWDocument57 pagesRWPramod DhaigudeNo ratings yet
- An Overview of Buckling Analysis of Cylinder Subjected To Axially Compressive LoadDocument5 pagesAn Overview of Buckling Analysis of Cylinder Subjected To Axially Compressive LoadPramod DhaigudeNo ratings yet
- 4MA1 2H Que 20200305Document28 pages4MA1 2H Que 20200305Ahmed Hassan75% (4)
- AS Maths CirclesDocument8 pagesAS Maths CirclesCraig EnnisNo ratings yet
- Udupi Maths Prep Exam-Feb-2023-24Document4 pagesUdupi Maths Prep Exam-Feb-2023-24swetadigital123No ratings yet
- Jac 11 TestDocument4 pagesJac 11 TestNabaratna BiswalNo ratings yet
- 2010 Sec - MathDocument36 pages2010 Sec - MathGladys Leslie Robins UyNo ratings yet
- Engg GraphicsDocument10 pagesEngg GraphicsBalagopal VNo ratings yet
- Pen DnnjmriDocument24 pagesPen Dnnjmrisuar90No ratings yet
- Harvard Design Magazine - Current IssueDocument6 pagesHarvard Design Magazine - Current IssuenighbNo ratings yet
- Math 356 Abstract Algebra Midterm I (Due 5pm February 21st, 2003)Document7 pagesMath 356 Abstract Algebra Midterm I (Due 5pm February 21st, 2003)kvanps_kumarNo ratings yet
- Eigen Symmetric 3 X 3Document21 pagesEigen Symmetric 3 X 3Igor GjorgjievNo ratings yet
- Verifying Identities SolutionsDocument2 pagesVerifying Identities SolutionsIsmail Medhat SalahNo ratings yet
- Wellington School: Entrance Paper For A Level Mathematics CoursesDocument15 pagesWellington School: Entrance Paper For A Level Mathematics CourseswormvladNo ratings yet
- Vector Spaces Handwritten Notes WWW - MathcityDocument58 pagesVector Spaces Handwritten Notes WWW - Mathcityatiq4pk89% (9)
- Math-I Secondary Education Curriculum 2010Document34 pagesMath-I Secondary Education Curriculum 2010Hari Ng SablayNo ratings yet
- FourDocument19 pagesFourSubhay kumarNo ratings yet
- Cables and Arches: Structural Analysis 7 Edition in SI UnitsDocument31 pagesCables and Arches: Structural Analysis 7 Edition in SI Unitsazerai2000No ratings yet
- Statics Solved ProblemsDocument4 pagesStatics Solved ProblemsRomeoNo ratings yet
- Model Test Maths X 2020-21Document4 pagesModel Test Maths X 2020-21brij mNo ratings yet
- In Mathway - "Find The Standard Form of The Equation"Document34 pagesIn Mathway - "Find The Standard Form of The Equation"Deborah Tarpley HicksNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFbosschellenNo ratings yet
- Powerpoint - Cot Math 4Document19 pagesPowerpoint - Cot Math 4Ruth LebosadaNo ratings yet
- PP 6.3 D PDFDocument3 pagesPP 6.3 D PDFSattar SajidNo ratings yet
- 9-Trigonometric Ratios WorksheetDocument4 pages9-Trigonometric Ratios WorksheetAngela TaylorNo ratings yet
- Ch.7. Plane Linear Elasticity: Continuum Mechanics Course (MMC)Document40 pagesCh.7. Plane Linear Elasticity: Continuum Mechanics Course (MMC)YordisPalacioNo ratings yet
- Chapter 13Document30 pagesChapter 13anil.gelra5140100% (3)
- Math Term 2 Sample Paper 1Document2 pagesMath Term 2 Sample Paper 1Saiteja SrirangamNo ratings yet
- Iemh108 PDFDocument17 pagesIemh108 PDFpiruthvi chendurNo ratings yet
- FE Modeler Part Meshes With ANSYS FE ModelerDocument17 pagesFE Modeler Part Meshes With ANSYS FE ModelermilanstrNo ratings yet