You might also like
- Week - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Document7 pagesWeek - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Mrunal BhilareNo ratings yet
- Introtodeeplearning MIT 6.S191Document36 pagesIntrotodeeplearning MIT 6.S191jayateerthaNo ratings yet
- A Probabilistic Theory of Deep Learning: Unit 2Document17 pagesA Probabilistic Theory of Deep Learning: Unit 2HarshitNo ratings yet
- Character Recognition Using Neural Networks: Rókus Arnold, Póth MiklósDocument4 pagesCharacter Recognition Using Neural Networks: Rókus Arnold, Póth MiklósSharath JagannathanNo ratings yet
- SP18 Practice MidtermDocument5 pagesSP18 Practice MidtermHasimNo ratings yet
- Deep Neural Network DNNDocument5 pagesDeep Neural Network DNNjaffar bikatNo ratings yet
- Monte Carlo Search in Graph Structures Applied To MDPS: Luisa A. de Almeida and Carlos H. C. RibeiroDocument6 pagesMonte Carlo Search in Graph Structures Applied To MDPS: Luisa A. de Almeida and Carlos H. C. RibeiroCarlos RibeiroNo ratings yet
- Gradient Descent AlgorithmDocument5 pagesGradient Descent AlgorithmravinyseNo ratings yet
- F16midterm_sols_v2Document14 pagesF16midterm_sols_v2Nawaal SiddiqueNo ratings yet
- Homework 1Document2 pagesHomework 1Hendra LimNo ratings yet
- Deep Learning Assignment 1 Solution: Name: Vivek Rana Roll No.: 1709113908Document5 pagesDeep Learning Assignment 1 Solution: Name: Vivek Rana Roll No.: 1709113908vikNo ratings yet
- TensorflowDocument25 pagesTensorflowSudharshan VenkateshNo ratings yet
- Deep LearningDocument5 pagesDeep LearningTom AmitNo ratings yet
- Machine Learning and Pattern Recognition Week 8_neural_net_fittingDocument3 pagesMachine Learning and Pattern Recognition Week 8_neural_net_fittingzeliawillscumbergNo ratings yet
- The Cascade-Correlation Learning Architecture: Scott E. Fahlman and Christian LebiereDocument14 pagesThe Cascade-Correlation Learning Architecture: Scott E. Fahlman and Christian LebiereSylvia VassilevaNo ratings yet
- Application of Back-Propagation Neural Network in Data ForecastDocument23 pagesApplication of Back-Propagation Neural Network in Data ForecastEngineeringNo ratings yet
- AZUL Report Team 7Document6 pagesAZUL Report Team 7Panagiotis TrapatsasNo ratings yet
- Imagenet ClassificationDocument9 pagesImagenet Classificationice117No ratings yet
- AlexNetDocument9 pagesAlexNetMahmoudNo ratings yet
- DeepMind WhitepaperDocument9 pagesDeepMind WhitepapercrazylifefreakNo ratings yet
- RandomDocument18 pagesRandomYaniNo ratings yet
- Machine Learning Data Acquisition and Feature SelectionDocument28 pagesMachine Learning Data Acquisition and Feature Selectionvkv.foeNo ratings yet
- ML Assignment6Question GitDocument2 pagesML Assignment6Question Gitvullingala syanthanNo ratings yet
- CNN: How Computer Vision Works Using Convolutional Neural NetworksDocument28 pagesCNN: How Computer Vision Works Using Convolutional Neural NetworksAhsan IsmailNo ratings yet
- Artificial Intelligence On "Dots and Boxes" GameDocument19 pagesArtificial Intelligence On "Dots and Boxes" Gametesting33829100% (1)
- Biologically-Inspired CNN Model ChapterDocument7 pagesBiologically-Inspired CNN Model ChapterpavithrNo ratings yet
- Deep Learning Interview Questions and AnswersDocument21 pagesDeep Learning Interview Questions and AnswersSumathi MNo ratings yet
- SP18 CS182 Midterm Solutions - EditedDocument14 pagesSP18 CS182 Midterm Solutions - EditedHasimNo ratings yet
- Efficient Net B0Document4 pagesEfficient Net B0NavyaNo ratings yet
- Artificial Neural NetworksDocument5 pagesArtificial Neural NetworksCharef WidedNo ratings yet
- Bandit-Based Monte-Carlo PlanningDocument12 pagesBandit-Based Monte-Carlo PlanningArias JoseNo ratings yet
- CS-601-Machine-learning-Unit-3Document37 pagesCS-601-Machine-learning-Unit-3Priyanka BhateleNo ratings yet
- 111 ReportDocument6 pages111 ReportNguyễn Tự SangNo ratings yet
- Proj3 Arc2Document6 pagesProj3 Arc2api-538408600No ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Reinforcement Learning Environment OverviewDocument7 pagesReinforcement Learning Environment Overviewazad Tech20No ratings yet
- MT1 SP19 SolutionsDocument14 pagesMT1 SP19 SolutionsHasimNo ratings yet
- A Communication-Efficient Parallel Algorithm For Decision TreeDocument9 pagesA Communication-Efficient Parallel Algorithm For Decision TreeRaanaNo ratings yet
- RL Project_ Deep Q-Network Agent ReportDocument11 pagesRL Project_ Deep Q-Network Agent ReportPhạm TịnhNo ratings yet
- Project Report: CS 574 - Computer Vision Using Machine LearningDocument38 pagesProject Report: CS 574 - Computer Vision Using Machine Learningshubham koulNo ratings yet
- Efficient Non-Maximum Suppression: January 2006Document7 pagesEfficient Non-Maximum Suppression: January 2006beyond2017No ratings yet
- King-Rook Vs King With Neural NetworksDocument10 pagesKing-Rook Vs King With Neural NetworksfuzzieNo ratings yet
- 1.1 Proposed Algorithms 1.1.1 Random Forest Algorithm: Ensemble LearningDocument81 pages1.1 Proposed Algorithms 1.1.1 Random Forest Algorithm: Ensemble LearningVijay ReddyNo ratings yet
- Coincent - Data Science With Python AssignmentDocument23 pagesCoincent - Data Science With Python AssignmentSai Nikhil Nellore100% (2)
- 20 Questions to Test your Skills on CNN (Convolutional Neural NetworksDocument11 pages20 Questions to Test your Skills on CNN (Convolutional Neural NetworksKumkumo Kussia KossaNo ratings yet
- Deep Learning QuestionsDocument51 pagesDeep Learning QuestionsAditi Jaiswal100% (1)
- Comparison of Gradient Descent Algorithms On Training Neural NetworksDocument20 pagesComparison of Gradient Descent Algorithms On Training Neural NetworksLoc LuongNo ratings yet
- Unit 3 - Machine LearningDocument16 pagesUnit 3 - Machine LearningGauri BansalNo ratings yet
- Deep Learning NotesDocument44 pagesDeep Learning NotesAJAY SINGH NEGI100% (1)
- Machine Learning (PARAMETER'S RESUMES 2)Document8 pagesMachine Learning (PARAMETER'S RESUMES 2)AlexNo ratings yet
- Unit 5Document8 pagesUnit 5arinkamble1711No ratings yet
- CNN Course-Notes 365Document29 pagesCNN Course-Notes 365aherfNo ratings yet
- UNIT IV - Neural NetworksDocument7 pagesUNIT IV - Neural Networkslokesh KoppanathiNo ratings yet
- CNN Machine Learning UnitDocument15 pagesCNN Machine Learning Unitmohit jaiswalNo ratings yet
- Artificial Intelligence On "Dots & Boxes" Game: Mehdi Kabir June 2, 2004Document19 pagesArtificial Intelligence On "Dots & Boxes" Game: Mehdi Kabir June 2, 2004Devashish RajNo ratings yet
- Adavances in Deep-Q Learning PDFDocument64 pagesAdavances in Deep-Q Learning PDFJose GarciaNo ratings yet
- Artificial Neural Networks - Lect - 4Document17 pagesArtificial Neural Networks - Lect - 4ma5395822No ratings yet
- Artificial Intelligence Interview QuestionsFrom EverandArtificial Intelligence Interview QuestionsRating: 5 out of 5 stars5/5 (2)
- CV 1Document2 pagesCV 1api-286637373No ratings yet
- Chrislu Proposal 1Document3 pagesChrislu Proposal 1api-286637373No ratings yet
- Csoi Project Summary 2Document1 pageCsoi Project Summary 2api-286637373No ratings yet
- Resume 08 2016Document2 pagesResume 08 2016api-286637373No ratings yet
- Chapter 11 Recursion PDFDocument38 pagesChapter 11 Recursion PDFGirmaNo ratings yet
- Generating Random Numbers in JavaScript - by Javascript Jeep?? - Better Programming - MediumDocument4 pagesGenerating Random Numbers in JavaScript - by Javascript Jeep?? - Better Programming - MediumKelve AragaoNo ratings yet
- Lesson 1 Kotlin BasicsDocument59 pagesLesson 1 Kotlin BasicsblayarzNo ratings yet
- Espanillo Midterm Exam Data Structure 2it2Document10 pagesEspanillo Midterm Exam Data Structure 2it2pia espanilloNo ratings yet
- Recursive Definitions and Formal LanguagesDocument111 pagesRecursive Definitions and Formal Languagessneha chowdary100% (2)
- A (MATH1) - A (CS1) A (CS2) A (MATH1) Computer MATH1 Is Under Attack by An IntruderDocument8 pagesA (MATH1) - A (CS1) A (CS2) A (MATH1) Computer MATH1 Is Under Attack by An IntruderTamim IslamNo ratings yet
- Problems For Algorithm Development: Java ProgrammingDocument7 pagesProblems For Algorithm Development: Java ProgrammingJerico Hercules Mutia0% (1)
- Solving Linear Equations with Crout's Method (LU DecompositionDocument9 pagesSolving Linear Equations with Crout's Method (LU DecompositionalbertNo ratings yet
- Pool Scrubber TankDocument37 pagesPool Scrubber TankRanchojiNo ratings yet
- Midterm Questions - Answer SheetDocument4 pagesMidterm Questions - Answer SheetaHealthyKidneyNo ratings yet
- CSC583 Final Aug2021 - QuestionDocument6 pagesCSC583 Final Aug2021 - QuestionMUHAMMAD DANIEL AIMAN BIN MD AMANNo ratings yet
- Heap Sort Algorithm - InterviewBit PDFDocument9 pagesHeap Sort Algorithm - InterviewBit PDFLee XingNo ratings yet
- IEEE Standard 754 Floating-PointDocument9 pagesIEEE Standard 754 Floating-PointLucifer StarkNo ratings yet
- Binary Search Tree - NotesDocument7 pagesBinary Search Tree - Notessathwik vaguNo ratings yet
- Lab Copy 3Document20 pagesLab Copy 3Indrajit AkuliNo ratings yet
- CPT212 - Graphs Pt.1 (ELearn)Document45 pagesCPT212 - Graphs Pt.1 (ELearn)weimin chooNo ratings yet
- Page Replacement AlgorithmsDocument8 pagesPage Replacement AlgorithmsPrabavathiNo ratings yet
- Java Grade 11 Part 3Document64 pagesJava Grade 11 Part 3TanavNo ratings yet
- Maths Mphil Project - CompressDocument80 pagesMaths Mphil Project - CompressJanet RoyNo ratings yet
- De Novo Programming: Ha Thi Xuan Chi, PHDDocument21 pagesDe Novo Programming: Ha Thi Xuan Chi, PHDhusterNo ratings yet
- 18Mn02 Advanced Operations Research 3 2 0 4Document1 page18Mn02 Advanced Operations Research 3 2 0 4Alvaro AbineshNo ratings yet
- Design Analysis and Algorithm - Chapter01 Duc Anany V. Levitin 3eDocument37 pagesDesign Analysis and Algorithm - Chapter01 Duc Anany V. Levitin 3eMadan LalNo ratings yet
- Secure Quantum Network Coding TheoryDocument288 pagesSecure Quantum Network Coding Theorysomeuser287No ratings yet
- Tut-5 Scheduling-SolutionDocument4 pagesTut-5 Scheduling-Solutionantarctica809No ratings yet
- AI Problem Solving and Search TechniquesDocument8 pagesAI Problem Solving and Search TechniquesSoumitra Roy ChowdhuryNo ratings yet
- Leetcode DSA Sheet by FrazDocument12 pagesLeetcode DSA Sheet by FrazSamsung TabletNo ratings yet
- Data structures algorithms fileDocument3 pagesData structures algorithms fileAnonymous sus3ugOxkwNo ratings yet
- Liang Chapter 4Document31 pagesLiang Chapter 4Anu ChackoNo ratings yet
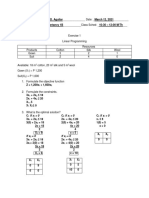
- AEC4 - Aguilar, Hayna Marie - BSA1B - Exercise1Document3 pagesAEC4 - Aguilar, Hayna Marie - BSA1B - Exercise1Hayna Marie AguilarNo ratings yet
- Functional Programming Patterns in Scala and Clojure - Write Lean Programs For The JVM (Bevilacqua-Linn 2013-11-02)Document253 pagesFunctional Programming Patterns in Scala and Clojure - Write Lean Programs For The JVM (Bevilacqua-Linn 2013-11-02)Madhavan Eyunni100% (3)