You might also like
- Reinforcement Learning Explained - A Step-by-Step Guide to Reward-Driven AIFrom EverandReinforcement Learning Explained - A Step-by-Step Guide to Reward-Driven AINo ratings yet
- DeepMind WhitepaperDocument9 pagesDeepMind WhitepapercrazylifefreakNo ratings yet
- Image Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningFrom EverandImage Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningNo ratings yet
- RL Project_ Deep Q-Network Agent PresentationDocument15 pagesRL Project_ Deep Q-Network Agent PresentationPhạm TịnhNo ratings yet
- RL Course ReportDocument10 pagesRL Course ReportshaneNo ratings yet
- Origins of Life Questions and DebatesDocument12 pagesOrigins of Life Questions and DebatesPéter ErdeiNo ratings yet
- An Efficient Hardware Implementation of Reinforcement Learning: The Q-Learning AlgorithmDocument12 pagesAn Efficient Hardware Implementation of Reinforcement Learning: The Q-Learning AlgorithmNguyễn Hồng NhungNo ratings yet
- An Efficient Hardware Implementation of Reinforcement Learning: The Q-Learning AlgorithmDocument12 pagesAn Efficient Hardware Implementation of Reinforcement Learning: The Q-Learning AlgorithmNguyễn Hồng NhungNo ratings yet
- ML Assignment6Question GitDocument2 pagesML Assignment6Question Gitvullingala syanthanNo ratings yet
- Reinforcement LN-6Document13 pagesReinforcement LN-6M S PrasadNo ratings yet
- DD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionDocument9 pagesDD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionbboyvnNo ratings yet
- Assignment3 Yash PatelDocument10 pagesAssignment3 Yash PateladyanrfutureNo ratings yet
- Assignment 3 - ReinforcementLearning - 200508263 - AdityaAnantharaman - TrikkurDocument9 pagesAssignment 3 - ReinforcementLearning - 200508263 - AdityaAnantharaman - TrikkuradyanrfutureNo ratings yet
- Reinforcement Learning: Russell and Norvig: CH 21Document16 pagesReinforcement Learning: Russell and Norvig: CH 21ZuzarNo ratings yet
- Machine Learning Text ClassificationDocument16 pagesMachine Learning Text ClassificationhunternamkhungNo ratings yet
- Research PaperDocument10 pagesResearch Paper李默然No ratings yet
- 111 ReportDocument6 pages111 ReportNguyễn Tự SangNo ratings yet
- A Beginner's Guide To Deep Reinforcement Learning: Skymind - AiDocument23 pagesA Beginner's Guide To Deep Reinforcement Learning: Skymind - AiNIKHILESH M NAIK 1827521No ratings yet
- Papadimitriou Monte Carlo BiasDocument10 pagesPapadimitriou Monte Carlo BiasTom WestNo ratings yet
- Electronics 09 01384Document13 pagesElectronics 09 01384mahdi tahiriNo ratings yet
- Deep Reinforcement Learning: From Q-Learning To Deep Q-LearningDocument9 pagesDeep Reinforcement Learning: From Q-Learning To Deep Q-LearningLuiz R. LimaNo ratings yet
- 362 ReportDocument6 pages362 ReportNguyễn Tự SangNo ratings yet
- Ee126 Project 1Document5 pagesEe126 Project 1api-286637373No ratings yet
- Asynchronous Methods For Deep Reinforcement LearningDocument28 pagesAsynchronous Methods For Deep Reinforcement LearningscribrrrrNo ratings yet
- AI Tools Assignment Explains Machine Learning ConceptsDocument6 pagesAI Tools Assignment Explains Machine Learning ConceptsPhilNo ratings yet
- Simulation of Mobile Robot Navigation Using Q-Learning and Neural NetworksDocument12 pagesSimulation of Mobile Robot Navigation Using Q-Learning and Neural NetworkstechlabNo ratings yet
- Genetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Document31 pagesGenetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Nelson AriasNo ratings yet
- Human-Level Control Through Deep Reinforcement LearningDocument13 pagesHuman-Level Control Through Deep Reinforcement LearningRazielAbulafiaNo ratings yet
- Adavances in Deep-Q Learning PDFDocument64 pagesAdavances in Deep-Q Learning PDFJose GarciaNo ratings yet
- 3.5 Intro2DeepQLearningDocument12 pages3.5 Intro2DeepQLearninganxo4spamNo ratings yet
- A Review of Deep Deterministic Policy Gradients in Reinforcement Learning For Robotics 1Document8 pagesA Review of Deep Deterministic Policy Gradients in Reinforcement Learning For Robotics 1api-461820735No ratings yet
- Reinforcement Learning: Russell and Norvig: CH 21Document16 pagesReinforcement Learning: Russell and Norvig: CH 21ZuzarNo ratings yet
- Playing Atari With Deep Reinforcement Learning HighlightedDocument9 pagesPlaying Atari With Deep Reinforcement Learning HighlightedFelipe DuarteNo ratings yet
- Reinforcement Learning Control of Robot Manipulators in Uncertain EnvironmentsDocument6 pagesReinforcement Learning Control of Robot Manipulators in Uncertain EnvironmentsVehid TavakolNo ratings yet
- Multi-Agent Deep Reinforcement Learning: Maxim Egorov Stanford UniversityDocument8 pagesMulti-Agent Deep Reinforcement Learning: Maxim Egorov Stanford UniversityCreativ PinoyNo ratings yet
- RL OverviewDocument19 pagesRL OverviewFauzi AbdurrohimNo ratings yet
- Istributed Computing Systems in Resources Management UsingDocument7 pagesIstributed Computing Systems in Resources Management UsingAbdelrahman AlmassryNo ratings yet
- Zeyu Tan AI Assessment ReportDocument14 pagesZeyu Tan AI Assessment ReportAnna LionNo ratings yet
- Playing Geometry Dash With Convolutional Neural NetworksDocument7 pagesPlaying Geometry Dash With Convolutional Neural NetworksfriedmanNo ratings yet
- Rewards in Reinforcement LearningDocument12 pagesRewards in Reinforcement LearningJack LumberNo ratings yet
- Lecture 29 RLDocument38 pagesLecture 29 RLprakuld04No ratings yet
- Reinforcement Learning by Comparing Immediate Reward: Punit Pandey DeepshikhapandeyDocument5 pagesReinforcement Learning by Comparing Immediate Reward: Punit Pandey DeepshikhapandeyBanifisabilillah Ibnu HashimNo ratings yet
- Reinf 2Document4 pagesReinf 2faria shahzadiNo ratings yet
- RL FrraDocument10 pagesRL FrraVishal TarwatkarNo ratings yet
- Learning Simple Games With Neural Networks: Kumar Ashutosh Mohd Safwan Manas VashisthaDocument6 pagesLearning Simple Games With Neural Networks: Kumar Ashutosh Mohd Safwan Manas VashisthaMohd SafwanNo ratings yet
- Maai 6Document143 pagesMaai 6Tùng ĐàoNo ratings yet
- Balancing_a_CartPole_System_with_Reinforcement_LeaDocument8 pagesBalancing_a_CartPole_System_with_Reinforcement_LeaKeerthana ChirumamillaNo ratings yet
- Making The Car Faster On Highway in DeeptrafficDocument3 pagesMaking The Car Faster On Highway in Deeptrafficapi-339792990No ratings yet
- Reinforcement Learning ExplainedDocument34 pagesReinforcement Learning ExplainedAnum KhawajaNo ratings yet
- 11757-Article Text-15285-1-2-20201228 PDFDocument8 pages11757-Article Text-15285-1-2-20201228 PDFMurilo ToledoNo ratings yet
- Deep Reinforcement Learning for Algorithmic TradingDocument9 pagesDeep Reinforcement Learning for Algorithmic Tradingenghoss77No ratings yet
- A Reinforcement Learning Approach To Obstacle Avoidance of MobilDocument5 pagesA Reinforcement Learning Approach To Obstacle Avoidance of MobilGhanshyam s.nairNo ratings yet
- Artificial Intelligence: Project Report "Implementation of Snake Game Using Deep Q-Learning Algorithm"Document9 pagesArtificial Intelligence: Project Report "Implementation of Snake Game Using Deep Q-Learning Algorithm"Rabeea AhmadNo ratings yet
- Reinforcement Learning Robot Walks with Q-LearningDocument5 pagesReinforcement Learning Robot Walks with Q-LearningMohamedLahouaouiNo ratings yet
- PrabeshPaudel-ExploringGamePlayingAIusingReinforcementLearningTechniquesDocument5 pagesPrabeshPaudel-ExploringGamePlayingAIusingReinforcementLearningTechniquesdhanushdarshan7No ratings yet
- BBQ-Networks: Efficient Exploration in Deep Reinforcement Learning For Task-Oriented Dialogue SystemsDocument8 pagesBBQ-Networks: Efficient Exploration in Deep Reinforcement Learning For Task-Oriented Dialogue SystemsMohammadNo ratings yet
- AZUL Report Team 7Document6 pagesAZUL Report Team 7Panagiotis TrapatsasNo ratings yet
- Introduction To Reinforcement LearningDocument21 pagesIntroduction To Reinforcement LearningSamuel Eli Mtz OrtizNo ratings yet
- Deep Quality-Value (DQV) Learning: Preprint. Work in ProgressDocument10 pagesDeep Quality-Value (DQV) Learning: Preprint. Work in ProgressfradmardNo ratings yet
- Actor-Critic Policy Optimization in Partially Observable Multiagent Environments 1810.09026Document28 pagesActor-Critic Policy Optimization in Partially Observable Multiagent Environments 1810.09026Zhengyou ZhangNo ratings yet
- CONCRETE TECHNOLOGY EXAMDocument28 pagesCONCRETE TECHNOLOGY EXAMbhanuprakeshNo ratings yet
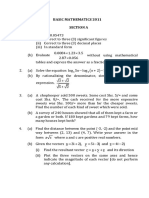
- Basic Mathematics 2011-QNDocument5 pagesBasic Mathematics 2011-QNEmanuel John BangoNo ratings yet
- Calculating Standard Error Bars For A GraphDocument6 pagesCalculating Standard Error Bars For A GraphKona MenyongaNo ratings yet
- Minute of ArcDocument4 pagesMinute of ArcvnfloreaNo ratings yet
- Microsoft Word - Area RelatedDocument1 pageMicrosoft Word - Area Relatedjitender8No ratings yet
- Chapter 7 PDFDocument25 pagesChapter 7 PDFbptlmohankumarNo ratings yet
- Chap 15ha OscillationsDocument61 pagesChap 15ha OscillationsXahid HasanNo ratings yet
- 2.measures of Variation by Shakil-1107Document18 pages2.measures of Variation by Shakil-1107MD AL-AMINNo ratings yet
- Mind MapDocument1 pageMind MapJhuwen Acob ValdezNo ratings yet
- Credit Card Fraud Detection SystemDocument7 pagesCredit Card Fraud Detection SystemIJRASETPublications100% (1)
- Relational Comparisons in AliceDocument4 pagesRelational Comparisons in AliceAhmad Abdul HadiNo ratings yet
- Mathematical Anxiety and Mathematical CompetenceDocument81 pagesMathematical Anxiety and Mathematical CompetenceAsus LaptopNo ratings yet
- Vectors and Scalars: John O'Connor St. Farnan's PPS ProsperousDocument15 pagesVectors and Scalars: John O'Connor St. Farnan's PPS ProsperousTemesgen BihonegnNo ratings yet
- Esm410 Assignment 1 Portfolio VersionDocument12 pagesEsm410 Assignment 1 Portfolio Versionapi-282084309No ratings yet
- Os Lab Exno 1 To 5Document38 pagesOs Lab Exno 1 To 5Vairavel ChenniyappanNo ratings yet
- 28 Oveja - Quentin TrollipDocument5 pages28 Oveja - Quentin TrollipJuan Carlos CocaNo ratings yet
- Independent Study Guidance - Further Maths.86642862Document2 pagesIndependent Study Guidance - Further Maths.86642862Emmaculate OngumNo ratings yet
- Novel Approach to Job's MethodDocument6 pagesNovel Approach to Job's Methodiabureid7460No ratings yet
- Mathematics: Quarter 1 - Module 7: Week 3 Multiplying NumbersDocument25 pagesMathematics: Quarter 1 - Module 7: Week 3 Multiplying NumbersIris IshiiNo ratings yet
- Earth Return Imped v1Document35 pagesEarth Return Imped v1bubo28No ratings yet
- Instructions For Preparation of Papers in A B5 Format For Laboratory Competence 2016Document4 pagesInstructions For Preparation of Papers in A B5 Format For Laboratory Competence 2016DanielNo ratings yet
- Analog Simulation Manual - 2Document72 pagesAnalog Simulation Manual - 2mefortruthNo ratings yet
- Discrete Mathematic LEC-04:: Fundamental Algebra Groups, Rings, FieldsDocument37 pagesDiscrete Mathematic LEC-04:: Fundamental Algebra Groups, Rings, FieldsMai LoanNo ratings yet
- Multiple Regression AnalysisDocument41 pagesMultiple Regression AnalysisAmisha PandeyNo ratings yet
- 01 - 7-Class - Maths - Bridge Program - Atp NCS - 1-23Document23 pages01 - 7-Class - Maths - Bridge Program - Atp NCS - 1-23Rita TripathiNo ratings yet
- Pre CalculusDocument6 pagesPre CalculusRaeNo ratings yet
- NPTEL Transcript PDFDocument977 pagesNPTEL Transcript PDFLakshmiNarayana Reddy BynagariNo ratings yet
- Machine Learning in Antenna Design An Overview On Machine Learning Concept and AlgorithmsDocument9 pagesMachine Learning in Antenna Design An Overview On Machine Learning Concept and AlgorithmssagarduttaNo ratings yet
- GajaDocument17 pagesGajaMurnali MeghaNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- The Digital Mind: How Science is Redefining HumanityFrom EverandThe Digital Mind: How Science is Redefining HumanityRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet