You might also like
- Evil Eyes - Bill HolmanDocument32 pagesEvil Eyes - Bill HolmanRichard Rollo100% (1)
- 7c Zbiór Zadań Z Elektrotechniki - Aleksy Markiewicz Rozwiązania Od 7.89 Do 7.121Document29 pages7c Zbiór Zadań Z Elektrotechniki - Aleksy Markiewicz Rozwiązania Od 7.89 Do 7.121skyr skyrowskiNo ratings yet
- RR Pacific PDFDocument26 pagesRR Pacific PDFCalin Silviu100% (2)
- Design of TbeamDocument7 pagesDesign of TbeamJJ TevesNo ratings yet
- ChemostatDocument10 pagesChemostatFrancesco FerellaNo ratings yet
- Sheet Metal Bom: Sr. No Itemid Revision No Description MaterialcodeDocument3 pagesSheet Metal Bom: Sr. No Itemid Revision No Description MaterialcoderamNo ratings yet
- 2do Parcial Mec2253Document7 pages2do Parcial Mec2253Fercho MenloNo ratings yet
- bobina exploradoraDocument7 pagesbobina exploradoraJUAN SEBASTIAN MOSQUERA TORRESNo ratings yet
- MatematicaDocument46 pagesMatematicaKen HPNo ratings yet
- IEEE33 BusDocument17 pagesIEEE33 BusBách Tạ DuyNo ratings yet
- 6.18 Ocon TojoDocument10 pages6.18 Ocon TojoGregory Mora LlamacponccaNo ratings yet
- Curva de Calibración: Concentracion G/LDocument5 pagesCurva de Calibración: Concentracion G/LmariNo ratings yet
- RC ColumnDocument10 pagesRC ColumnSherwin CairoNo ratings yet
- Spherical OD TypeDocument1 pageSpherical OD TypeRamboNo ratings yet
- Perhitungan Irigasi MeidabvDocument19 pagesPerhitungan Irigasi MeidabvMeida Bella VistianaNo ratings yet
- Hubungan Antara Massa Beban Dan Perpanjangan PegasDocument6 pagesHubungan Antara Massa Beban Dan Perpanjangan PegasPramita Rimba CahyaniNo ratings yet
- Hubungan Antara Massa Beban Dan Perpanjangan PegasDocument6 pagesHubungan Antara Massa Beban Dan Perpanjangan PegasPramita Rimba CahyaniNo ratings yet
- Graph of Refractive Index Against Composition of EthanolDocument11 pagesGraph of Refractive Index Against Composition of EthanolchaitanyaNo ratings yet
- UTS Termo 2 - Wilta Putri SaiDocument2 pagesUTS Termo 2 - Wilta Putri SaiWilta PutriNo ratings yet
- Grafi Co de Codo Radio Corto: Grafica de ContraccíonDocument3 pagesGrafi Co de Codo Radio Corto: Grafica de ContraccíonJhon BenavidesNo ratings yet
- Trafo Step Down Trafo Step Up: VP Ip Vs Is VP Ip Vs IsDocument2 pagesTrafo Step Down Trafo Step Up: VP Ip Vs Is VP Ip Vs IsIhza CahyaNo ratings yet
- Step Up and Step Down Transformer Data AnalysisDocument2 pagesStep Up and Step Down Transformer Data AnalysisIhza CahyaNo ratings yet
- PSH B PDFDocument1 pagePSH B PDFLuis H OrtzNo ratings yet
- Datos Push OverDocument1 pageDatos Push OverLuis H OrtzNo ratings yet
- OperacionesDocument3 pagesOperacionesXavy J. AlverzNo ratings yet
- Interaction Diagrams - ECP 203-2007Document9 pagesInteraction Diagrams - ECP 203-2007Nicholson Vhenz UyNo ratings yet
- Motor Motor Type Rated Voltage Bus VoltageDocument5 pagesMotor Motor Type Rated Voltage Bus VoltageoinonNo ratings yet
- LABORATORIODocument2 pagesLABORATORIOAnonymous EhlFEGBNo ratings yet
- Software Exercise 1Document14 pagesSoftware Exercise 1MeraNo ratings yet
- Chart Title Chart TitleDocument2 pagesChart Title Chart TitleGilbert JapayNo ratings yet
- Tubos y diametros resumenDocument6 pagesTubos y diametros resumenGluno DelfinNo ratings yet
- 13 PDFDocument1 page13 PDFLuis H OrtzNo ratings yet
- Pushover Curve Analysis of Portico Plano ADocument1 pagePushover Curve Analysis of Portico Plano ALuis H OrtzNo ratings yet
- Tugas Dins1Document9 pagesTugas Dins1ChoirinNo ratings yet
- CD - Constant HeadDocument14 pagesCD - Constant HeadHutami MahardimaNo ratings yet
- Interaction Diagrams - ECP 203-2007 - Mohammed AtaDocument11 pagesInteraction Diagrams - ECP 203-2007 - Mohammed Atasherif mahmoudNo ratings yet
- S1 Factores de Zona Z4: Espectro E030-2016Document11 pagesS1 Factores de Zona Z4: Espectro E030-2016Mick Tirado SilvaNo ratings yet
- Perubahan Bobot: Perlakuan Ulangan Awal Akhir Selisih SD (%)Document9 pagesPerubahan Bobot: Perlakuan Ulangan Awal Akhir Selisih SD (%)efendiNo ratings yet
- Karakteristik Pengaturan Generator Sinkron Beban RDocument5 pagesKarakteristik Pengaturan Generator Sinkron Beban Ranon_859877685No ratings yet
- Partial Full Volume of TankDocument8 pagesPartial Full Volume of TankBabita GuptaNo ratings yet
- Informe 4 (Datos)Document5 pagesInforme 4 (Datos)Zaira Camila CriolloNo ratings yet
- Tatt Agrotek BDocument17 pagesTatt Agrotek BJun AdityaNo ratings yet
- Tabel Pengamatan Eksperimen Interferometer Fabry-PerotDocument3 pagesTabel Pengamatan Eksperimen Interferometer Fabry-Perotmaul ataNo ratings yet
- Perhitungan Deskripsi Dan Model ReservoirDocument18 pagesPerhitungan Deskripsi Dan Model Reservoiradhitya suzari putraNo ratings yet
- OriginalGL 200 mm tensile test resultsDocument62 pagesOriginalGL 200 mm tensile test resultsDavid CastañoNo ratings yet
- Pushover Curve Analysis of Portico Plano ADocument1 pagePushover Curve Analysis of Portico Plano ALuis H OrtzNo ratings yet
- Vertical-Curve ElaineDocument10 pagesVertical-Curve ElaineEngineering FriendNo ratings yet
- Single CSTR-Concentration VS Reduced TimeDocument17 pagesSingle CSTR-Concentration VS Reduced TimeRiazNo ratings yet
- Graph of CL vs Alpha Coefficient of HillDocument10 pagesGraph of CL vs Alpha Coefficient of HillPALOMA MORGADO FRANCONo ratings yet
- Chart Title: 0.012 F (X) 0.0900677061x - 0.0031511274 R 0.9328440986Document6 pagesChart Title: 0.012 F (X) 0.0900677061x - 0.0031511274 R 0.9328440986rizkaNo ratings yet
- Kurva Kesetimbangan Uap-Cair Cs2-Ccl4: Equilibrium Diagonal Enriching Section Stripping Section Distilat ResiduDocument12 pagesKurva Kesetimbangan Uap-Cair Cs2-Ccl4: Equilibrium Diagonal Enriching Section Stripping Section Distilat ResiduNur Muchamad ArifinNo ratings yet
- Typical Set of Wire Mesh Dimensions Pages From Ken Sutherland - Filters and Filtration Handbook (2008, Elsevier Science) - 2Document2 pagesTypical Set of Wire Mesh Dimensions Pages From Ken Sutherland - Filters and Filtration Handbook (2008, Elsevier Science) - 2Mohammad TaherNo ratings yet
- No. Formula Molar Mass NameDocument9 pagesNo. Formula Molar Mass NameNur RokhmaNo ratings yet
- MRUV (Recuperado Automaticamente)Document2 pagesMRUV (Recuperado Automaticamente)michelroNo ratings yet
- Batch Drying Experiment ResultsDocument5 pagesBatch Drying Experiment ResultsPiyush PastorNo ratings yet
- Topo Azotea FicDocument299 pagesTopo Azotea FicEDUNo ratings yet
- Book 1Document5 pagesBook 1Vivian DavinesNo ratings yet
- Interaction Diagrams - ECP 203-2007 - Mohammed AtaDocument9 pagesInteraction Diagrams - ECP 203-2007 - Mohammed AtaSantiago GutierrezNo ratings yet
- Inductance and Capacitance Chart for Various ConductorsDocument2 pagesInductance and Capacitance Chart for Various ConductorsAmmiel BuisingNo ratings yet
- Libro 1Document5 pagesLibro 1alonsninja10No ratings yet
- MDM Sidesway RestrainedDocument4 pagesMDM Sidesway RestrainedCh OuNo ratings yet
- Grafi K Gel. Langsung Dan Gel. RefraksiDocument5 pagesGrafi K Gel. Langsung Dan Gel. RefraksiAyyub AlqadriNo ratings yet
- Dokumen - Tips Oera Linda BookDocument135 pagesDokumen - Tips Oera Linda BookKevin ZidaneNo ratings yet
- Passive FilterDocument15 pagesPassive Filterfara aurinNo ratings yet
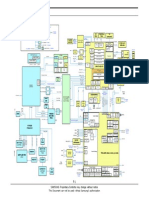
- Block Diagrams 8-1. Block Diagram: 8 - 1 SAMSUNG Proprietary-Contents May Change Without NoticeDocument3 pagesBlock Diagrams 8-1. Block Diagram: 8 - 1 SAMSUNG Proprietary-Contents May Change Without NoticeSyar ArifNo ratings yet
- 12th Science HSC Physics Numericals Hints PDFDocument150 pages12th Science HSC Physics Numericals Hints PDFTanvi ShahNo ratings yet
- 470 39 Solutions-Instructor-Manual SM Chapter-9 PDFDocument3 pages470 39 Solutions-Instructor-Manual SM Chapter-9 PDFSerajNo ratings yet
- Echolink Temas QRGssDocument370 pagesEcholink Temas QRGssSegura VinnieNo ratings yet
- FM Repeater Channel ListsDocument19 pagesFM Repeater Channel ListsAdmir BečićNo ratings yet
- Voxman - Selected Duets For Sax Vol IDocument72 pagesVoxman - Selected Duets For Sax Vol IMircea StioponNo ratings yet
- 3RS17 Signal IsolatorDocument4 pages3RS17 Signal IsolatorDeborah MalanumNo ratings yet
- Slip Ring Motor Reference Document with Technical SpecificationsDocument4 pagesSlip Ring Motor Reference Document with Technical Specificationsasdsd dsdaNo ratings yet
- Especificaciones Frecuencias ODUs HUAWEI 620Document26 pagesEspecificaciones Frecuencias ODUs HUAWEI 620Jonathan Hernández - F1 ServicesNo ratings yet
- Manufacturer ServosDocument6 pagesManufacturer ServosdanielNo ratings yet
- F46 520Document9 pagesF46 520zhobeysNo ratings yet
- Elffntanz - Florence PriceDocument10 pagesElffntanz - Florence PriceDario ZanconiNo ratings yet
- Un Dia de Noviembre - Leo Brouwer (Guitar Sheet Music)Document1 pageUn Dia de Noviembre - Leo Brouwer (Guitar Sheet Music)leogonzaris.academyNo ratings yet
- Huawei Freq RangeDocument14 pagesHuawei Freq Rangealanther dungcaNo ratings yet
- All FrequenciesDocument41 pagesAll FrequenciesAlaa Sami Abu FarhaNo ratings yet
- 18-Experiences With Nonsynchronous Forces Vibration Centrifugal Compressors - DRS&JCW PDFDocument0 pages18-Experiences With Nonsynchronous Forces Vibration Centrifugal Compressors - DRS&JCW PDFvcharlesNo ratings yet
- Brochure Jekko 12MGDocument21 pagesBrochure Jekko 12MGJosé Bayonas MartínezNo ratings yet
- Notacja wykładnicza - częstotliwościDocument3 pagesNotacja wykładnicza - częstotliwościJakub OrlikowskiNo ratings yet
- Low Pass Filter ActiveDocument8 pagesLow Pass Filter ActiveTioRamadhanNo ratings yet
- Q 6Document358 pagesQ 6orsbsoulNo ratings yet
- COM100D/COM100E: Rvjdl!Jotubmmbujpo!HvjefDocument10 pagesCOM100D/COM100E: Rvjdl!Jotubmmbujpo!HvjefKatherine SmithNo ratings yet
- утро родины 1 скрипкаDocument2 pagesутро родины 1 скрипкаivanfoeoninNo ratings yet
- Benning Mm7 1 ManualDocument184 pagesBenning Mm7 1 ManualAnonymous ZLmk6mPPnNo ratings yet
- Modal Analysis of Mechanical SystemsDocument6 pagesModal Analysis of Mechanical SystemsPranav RaveendranNo ratings yet
- SEO-optimized title for document about various topicsDocument376 pagesSEO-optimized title for document about various topicsAlexandru JilavuNo ratings yet