You might also like
- Lt225 DatasheetDocument3 pagesLt225 DatasheetJosé PerezNo ratings yet
- Panasonic (kx-f50) PDFDocument52 pagesPanasonic (kx-f50) PDFJosé PerezNo ratings yet
- 92136v00 Tips and Tricks Smart Signal Routing in SimulinkDocument2 pages92136v00 Tips and Tricks Smart Signal Routing in SimulinkJosé PerezNo ratings yet
- 1megapixel 720P IR HDCVI Mini Dome Camera: FeaturesDocument3 pages1megapixel 720P IR HDCVI Mini Dome Camera: FeaturesJosé PerezNo ratings yet
- Esr PDFDocument6 pagesEsr PDFsatyaNo ratings yet
- How To Find/Set My IP AddressDocument3 pagesHow To Find/Set My IP AddressJosé PerezNo ratings yet
- AP3101 Demo Board: Part Number: DB-AP3101-A Seriers Number: V1.3-038Document12 pagesAP3101 Demo Board: Part Number: DB-AP3101-A Seriers Number: V1.3-038José PerezNo ratings yet
- Diseño de Circuitos de Potencia - ThermalDocument36 pagesDiseño de Circuitos de Potencia - ThermalJosé PerezNo ratings yet
- Understanding Phase-Locked Loops: Paul LutusDocument15 pagesUnderstanding Phase-Locked Loops: Paul LutusJosé PerezNo ratings yet
- Ball & Beam: Simulink Modeling: Related Tutorial LinksDocument7 pagesBall & Beam: Simulink Modeling: Related Tutorial LinksJosé PerezNo ratings yet
- Diseño de Circuitos de Potencia - IGBTDocument54 pagesDiseño de Circuitos de Potencia - IGBTJosé PerezNo ratings yet
- Chapter 12 - Solutions: Problem 12.1. If The Sampling Frequency Is 1 (HZ), Then The Sampling PeDocument58 pagesChapter 12 - Solutions: Problem 12.1. If The Sampling Frequency Is 1 (HZ), Then The Sampling PeJosé PerezNo ratings yet
- DC Motor Calculations - National InstrumentsDocument22 pagesDC Motor Calculations - National InstrumentsJosé PerezNo ratings yet
- Sdg1000x Datasheet Ds0201x E01aDocument12 pagesSdg1000x Datasheet Ds0201x E01aJosé PerezNo ratings yet
- Modelling Battery Charge Regulation For A Stand-Alone Photovoltaic System PDFDocument10 pagesModelling Battery Charge Regulation For A Stand-Alone Photovoltaic System PDFJosé PerezNo ratings yet
- Atmel 42181 SAM D21 DatasheetDocument1,117 pagesAtmel 42181 SAM D21 DatasheetJosé PerezNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Norde Method PDFDocument3 pagesNorde Method PDFNektaria LouiseNo ratings yet
- Lester HendershotDocument3 pagesLester HendershotRodrigo CerqueiraNo ratings yet
- Aic Rep NewDocument10 pagesAic Rep Newj.k.boseNo ratings yet
- Dafang Single Girder Overheade Crane Operation Manual PDFDocument58 pagesDafang Single Girder Overheade Crane Operation Manual PDFSami SawalhaNo ratings yet
- Croma 19572 User Manual PDFDocument65 pagesCroma 19572 User Manual PDFRaul InzunzaNo ratings yet
- Technical Data Sheet "Infinity 3100": 10 15 20 kVA 3Ph - 1PhDocument7 pagesTechnical Data Sheet "Infinity 3100": 10 15 20 kVA 3Ph - 1PhFlorin MNo ratings yet
- Henry 5K & 3K Classic ManualDocument42 pagesHenry 5K & 3K Classic ManualferrofabNo ratings yet
- Bec 2021Document94 pagesBec 2021WYNo ratings yet
- E-Choke Design UKDocument13 pagesE-Choke Design UKtehnotonNo ratings yet
- RectifiersDocument27 pagesRectifiersMeral MeralNo ratings yet
- Cyclic VoltametryDocument41 pagesCyclic Voltametrysch203No ratings yet
- Solutions 6Document4 pagesSolutions 6Mi HoangNo ratings yet
- Physics Chapterwise Weightage - EAMCETDocument2 pagesPhysics Chapterwise Weightage - EAMCETVenu GopalNo ratings yet
- FR-E800 Instruction Manual - Function Ib0600868engeDocument534 pagesFR-E800 Instruction Manual - Function Ib0600868engeNguyễn Quang HảoNo ratings yet
- Substrate Integrated Waveguide (SIW) Techniques: The State-of-the-Art Developments and Future TrendsDocument23 pagesSubstrate Integrated Waveguide (SIW) Techniques: The State-of-the-Art Developments and Future TrendsclanonNo ratings yet
- Technical Specification For 110V, 80A Auto and Manual Float-Cum-Boost Battery Charger, 110V, 500 Ah Battery & DCDBDocument25 pagesTechnical Specification For 110V, 80A Auto and Manual Float-Cum-Boost Battery Charger, 110V, 500 Ah Battery & DCDBAchu DeepuNo ratings yet
- 08 Ta BWGF 000a B6eDocument3 pages08 Ta BWGF 000a B6eAmador AguilaNo ratings yet
- ELYM 115 2nd Opp Examination MC-2022-09-21 TTDocument3 pagesELYM 115 2nd Opp Examination MC-2022-09-21 TTTrevor TolibadiNo ratings yet
- Progress Chart EimDocument1 pageProgress Chart EimMay Esban100% (1)
- OGi Cell 400 2400 US0123Document2 pagesOGi Cell 400 2400 US0123Nguyễn Anh DanhNo ratings yet
- WEG CFW100 Quick Installation Guide 10005873399 enDocument2 pagesWEG CFW100 Quick Installation Guide 10005873399 enGuilherme NogueiraNo ratings yet
- SheetsDocument9 pagesSheetsnassim.197950% (2)
- C1786 PDFDocument3 pagesC1786 PDFbob loblawNo ratings yet
- Bittencourt - Fundamentals of Plasma PhysicsDocument700 pagesBittencourt - Fundamentals of Plasma Physicsjesús Iván Santamaria najarNo ratings yet
- Kohler 14 & 20kW RESADocument4 pagesKohler 14 & 20kW RESADerekMarkleyNo ratings yet
- Electrical Machine Design SOLVED PROBLEMS ON DC MACHINE MAGNETIC CIRCUIT Continuation of Chapter PDFDocument14 pagesElectrical Machine Design SOLVED PROBLEMS ON DC MACHINE MAGNETIC CIRCUIT Continuation of Chapter PDFMahesh MohananNo ratings yet
- 216B, 226, 232B, 236, 242, 246, 248, 252, 262, and 268 Skid Steer Loaders and 247, 257, 267, 277, and 287 Multi Terrain Loader Sist. Elect.Document4 pages216B, 226, 232B, 236, 242, 246, 248, 252, 262, and 268 Skid Steer Loaders and 247, 257, 267, 277, and 287 Multi Terrain Loader Sist. Elect.Pablo PorrasNo ratings yet
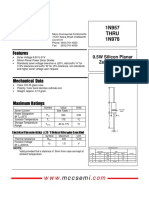
- Mccsemi:) HdwxuhvDocument2 pagesMccsemi:) HdwxuhvfreddyNo ratings yet
- Balun QEX Chris - Trask PDFDocument13 pagesBalun QEX Chris - Trask PDFNestor Alberto EscalaNo ratings yet
- Power Electronics Experts ListDocument8 pagesPower Electronics Experts ListViswanathan ASNo ratings yet