You might also like
- Working Sinewave InverterDocument10 pagesWorking Sinewave InverterxenotargetNo ratings yet
- ARDUINO UNO DocumentDocument25 pagesARDUINO UNO DocumentAilapaka ManojNo ratings yet
- Handbook For Solar PV Systems PDFDocument64 pagesHandbook For Solar PV Systems PDFyassine633No ratings yet
- Antennas For RFID TagsDocument13 pagesAntennas For RFID TagskiranNo ratings yet
- Logic Cross Reference HandbookDocument313 pagesLogic Cross Reference Handbookbesttv046936No ratings yet
- Tutorial - Arduino and The I2C Bus - Part OneDocument18 pagesTutorial - Arduino and The I2C Bus - Part OneSigid AriewibowoNo ratings yet
- Smart IC Tester PDFDocument8 pagesSmart IC Tester PDFhexapodo2No ratings yet
- VPX 6U DC28P 001 - DatasheetDocument9 pagesVPX 6U DC28P 001 - DatasheetManu MathewNo ratings yet
- Eee424 1 DC-DCDocument184 pagesEee424 1 DC-DCM.Feridun HızNo ratings yet
- Lecture 12 (ADC) Rv01Document47 pagesLecture 12 (ADC) Rv01Amirul HaqimieNo ratings yet
- mcp2515 Avr Can Spi PDFDocument31 pagesmcp2515 Avr Can Spi PDFcaubiosNo ratings yet
- A Short and Simple Guide To Bootloading The Attiny-85 or 45Document4 pagesA Short and Simple Guide To Bootloading The Attiny-85 or 45StephanieAnnRosales100% (1)
- CAN Bus Protocol PYLON Low Voltage V1.2 20180408Document5 pagesCAN Bus Protocol PYLON Low Voltage V1.2 20180408pj Co100% (1)
- PLC Con Atmega328p PDFDocument1 pagePLC Con Atmega328p PDFJuan SanchezNo ratings yet
- Railway GateDocument46 pagesRailway GateRocky SinghNo ratings yet
- Pi Cars RaspberryDocument34 pagesPi Cars Raspberrygo88No ratings yet
- Hough TransformDocument20 pagesHough Transformr10aldinhoNo ratings yet
- Chapter - 1: Controlling Robot Through Gesture RecognitionDocument9 pagesChapter - 1: Controlling Robot Through Gesture Recognitionamruta ghuteNo ratings yet
- KC 62133-2-제정고시 제2020-0138호 (2020.07.21.)Document52 pagesKC 62133-2-제정고시 제2020-0138호 (2020.07.21.)on.insight1829No ratings yet
- BTS7960 Motor Driver PDFDocument9 pagesBTS7960 Motor Driver PDFIqbal FirdausNo ratings yet
- L298N Motor DriverDocument7 pagesL298N Motor DrivercerenautaNo ratings yet
- Hand Gesture Controlled RobotDocument59 pagesHand Gesture Controlled RobotNiharikaNo ratings yet
- Handson Technology: TB6560 3A Stepper Motor Driver ModuleDocument7 pagesHandson Technology: TB6560 3A Stepper Motor Driver Moduleengsamuel15No ratings yet
- Gertboard OverviewDocument4 pagesGertboard OverviewAnonymous I42Heqce7fNo ratings yet
- CH340G Serial ModuleDocument8 pagesCH340G Serial ModuleZillaIllozNo ratings yet
- 8Ch Relay PDFDocument8 pages8Ch Relay PDFFandi DwiNo ratings yet
- AVR Project - Remote Controlled Fan Regulator.Document23 pagesAVR Project - Remote Controlled Fan Regulator.nadaratNo ratings yet
- TB6600 Motor DriverDocument10 pagesTB6600 Motor DriverRajitha Jayan KulathungaNo ratings yet
- LTspiceHelpXVII GuideDocument417 pagesLTspiceHelpXVII GuideQaunyi TuNo ratings yet
- MCB2300 CanDocument14 pagesMCB2300 CanMichaelNo ratings yet
- Top 10 Difference Between Arduino Uno and Raspberry Pi PDFDocument2 pagesTop 10 Difference Between Arduino Uno and Raspberry Pi PDFBipin100% (1)
- Infrared Remote Control CarDocument13 pagesInfrared Remote Control CarFunnypoumNo ratings yet
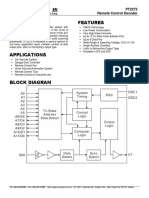
- PT2272 PDFDocument18 pagesPT2272 PDFalperdaNo ratings yet
- JYQD-V7.3E2 Brushless DC Motor Driver Board: Application GuidelinesDocument3 pagesJYQD-V7.3E2 Brushless DC Motor Driver Board: Application Guidelinesluis angel alvarez camposNo ratings yet
- RS-485 Tech NoteDocument21 pagesRS-485 Tech NoteAshley Sequeira100% (3)
- 4 20ma ConverterDocument159 pages4 20ma Converteradilson.krommeNo ratings yet
- Tda 7294Document17 pagesTda 7294Abubakar SidikNo ratings yet
- Aa3Rl - Transmission Line Calculator: Input Data: Output DataDocument5 pagesAa3Rl - Transmission Line Calculator: Input Data: Output DataNd ReyesNo ratings yet
- Fast and Effective Embedded System DesignDocument3 pagesFast and Effective Embedded System DesignAimagin100% (2)
- Gyro Camera For Motorcycle Using ArduinoDocument8 pagesGyro Camera For Motorcycle Using ArduinoCUIDAITONo ratings yet
- Intro To Embedded Systems - AMIT - NewDocument73 pagesIntro To Embedded Systems - AMIT - NewOmar EzzNo ratings yet
- UD24 English User ManualDocument22 pagesUD24 English User ManualRicardo LopezNo ratings yet
- Jump, Loop and Call Instructions: University of Engineering and Technology TaxilaDocument93 pagesJump, Loop and Call Instructions: University of Engineering and Technology TaxilaPraneetha InumarthiNo ratings yet
- AND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Document19 pagesAND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Jonatan LunaNo ratings yet
- Interfacing Programs For 8085Document37 pagesInterfacing Programs For 8085archankumarturagaNo ratings yet
- 100W MOSFET Power AmplifierDocument4 pages100W MOSFET Power AmplifierMitchel Jammal SNo ratings yet
- Wind Turbine MPPT Regulator v2.3 120120Document36 pagesWind Turbine MPPT Regulator v2.3 120120EdwinDuranJr.100% (1)
- Digital Thermometer Circuit.Document2 pagesDigital Thermometer Circuit.elvergonzalez1100% (1)
- Goldenmorning Electronic: Product Name: Rgs15128128Wr000 Product No.: Gme128128-01Document34 pagesGoldenmorning Electronic: Product Name: Rgs15128128Wr000 Product No.: Gme128128-01Scott WilsonNo ratings yet
- Pic32 Osc Config v1.1Document45 pagesPic32 Osc Config v1.1harikrishna242424No ratings yet
- Silicon Chip Online - Build A Water Level IndicatorDocument7 pagesSilicon Chip Online - Build A Water Level Indicatoredeva36No ratings yet
- MODbus Communication Protocol 2017-1-11Document30 pagesMODbus Communication Protocol 2017-1-11Anh NguyễnNo ratings yet
- Capacitive Touch Sensor Library For Proteus - The Engineering ProjectsDocument14 pagesCapacitive Touch Sensor Library For Proteus - The Engineering Projectstsegay100% (2)
- HCNR200 Application NoteDocument10 pagesHCNR200 Application NoteGustavoNo ratings yet
- Micro-Cap 12: Electronic Circuit Analysis Program Reference ManualDocument142 pagesMicro-Cap 12: Electronic Circuit Analysis Program Reference ManualMartin Estrada SotoNo ratings yet
- Arm Lab)Document34 pagesArm Lab)Siva GovindNo ratings yet
- DMX and Arduino TutorialDocument5 pagesDMX and Arduino TutorialHonorino García FernándezNo ratings yet
- Cds de SofwareDocument18 pagesCds de SofwareJoel MarvalNo ratings yet
- Com0Com ManualDocument7 pagesCom0Com Manualtornado89No ratings yet
- AppNote 10831 Zero Orientation Cad Library IPC 7351BDocument24 pagesAppNote 10831 Zero Orientation Cad Library IPC 7351BgiorgioviNo ratings yet
- BTS7960 Motor Driver - 230916 - 210941Document9 pagesBTS7960 Motor Driver - 230916 - 210941Alexandre PennaNo ratings yet
- Supermodified - Miniature Controller For DC MotorsDocument38 pagesSupermodified - Miniature Controller For DC MotorsGiovanni GambaNo ratings yet
- ULTRA SLIM Instruction ManualDocument7 pagesULTRA SLIM Instruction ManualWardaNo ratings yet
- 2006-2008 Honda Civic Si A/C System Testing ProcedureDocument1 page2006-2008 Honda Civic Si A/C System Testing ProcedureBill NucleusNo ratings yet
- SN54/74LS240 SN54/74LS241 SN54/74LS244: Low Power SchottkyDocument10 pagesSN54/74LS240 SN54/74LS241 SN54/74LS244: Low Power SchottkyDouglas CorderoNo ratings yet
- Transmission Line Main AccessoriesDocument5 pagesTransmission Line Main AccessoriesevjbalaNo ratings yet
- Electronic Devices and Circuit Theory Prelim LectureDocument128 pagesElectronic Devices and Circuit Theory Prelim LectureJustin ValdezNo ratings yet
- Switch Gear and Proctection: Subject Code: A70231 Regulations: R15 - Jntuh Class: IV Year B.Tech EEE I SemesterDocument21 pagesSwitch Gear and Proctection: Subject Code: A70231 Regulations: R15 - Jntuh Class: IV Year B.Tech EEE I SemestervenkatNo ratings yet
- Gate 2014 Ece PaperDocument30 pagesGate 2014 Ece PaperShobhit MauryaNo ratings yet
- 2sd636 Japan NPN TransistorDocument4 pages2sd636 Japan NPN Transistorjef fastNo ratings yet
- Physical/Mechanical Properties: General Conductor InformationDocument1 pagePhysical/Mechanical Properties: General Conductor InformationalbertoNo ratings yet
- STC PE Proceedings PDFDocument272 pagesSTC PE Proceedings PDFKR RamanNo ratings yet
- 2002 WedepohlDocument9 pages2002 WedepohlLuis SaavedraNo ratings yet
- Cnode Mini Inm A5 SizeDocument60 pagesCnode Mini Inm A5 SizecraigleivNo ratings yet
- Parts of The Analog MultitesterDocument4 pagesParts of The Analog MultitesterDestiny canacanNo ratings yet
- Sag-Tension Analysis of AAAC Overhead TR PDFDocument5 pagesSag-Tension Analysis of AAAC Overhead TR PDFTerex14253No ratings yet
- Chapter 4Document19 pagesChapter 4nasi nasiNo ratings yet
- Philips mcd288 Ver-1.4 SM PDFDocument39 pagesPhilips mcd288 Ver-1.4 SM PDFAnonymous M77SFaxeNo ratings yet
- Ir SensorDocument4 pagesIr SensorSundari LeoraNo ratings yet
- Irfp4768Pbf: Application V 250V R 14.5M 17.5M I 93ADocument9 pagesIrfp4768Pbf: Application V 250V R 14.5M 17.5M I 93AKrishna InamdarNo ratings yet
- NTE107 Silicon NPN Transistor UHF Oscillator For Tuner TO 92 Type PackageDocument2 pagesNTE107 Silicon NPN Transistor UHF Oscillator For Tuner TO 92 Type PackagekarlNo ratings yet
- Caixa Amplifica Stagg 40GAR - DSP - USADocument2 pagesCaixa Amplifica Stagg 40GAR - DSP - USAMarcelo M. MachadoNo ratings yet
- A6V10371999 - Electrothermal Actuators STA..3.. STP..3.. - enDocument18 pagesA6V10371999 - Electrothermal Actuators STA..3.. STP..3.. - enRogério DiasNo ratings yet
- Battery Monitoring BasicsDocument52 pagesBattery Monitoring BasicsKnwn StrngrNo ratings yet
- Beede Instrument - Stara Ploča Cummins 6BT Serija 546213Document2 pagesBeede Instrument - Stara Ploča Cummins 6BT Serija 546213godlike110No ratings yet
- Unguided MediaDocument16 pagesUnguided MediaAnirban Guha100% (1)
- Heat InputDocument1 pageHeat InputArul Edwin VijayNo ratings yet
- MCB - Miniature Circuit Breaker Construction - EEPDocument7 pagesMCB - Miniature Circuit Breaker Construction - EEPKamal Singh RajputNo ratings yet
- Regulated Power Supply Circuit - Arguelles, Allona Laine J.Document5 pagesRegulated Power Supply Circuit - Arguelles, Allona Laine J.spyde austriaNo ratings yet
- Clipper or Limiter CircuitsDocument8 pagesClipper or Limiter CircuitsRajNo ratings yet