You might also like
- Boiler BlowdownDocument3 pagesBoiler BlowdownSwaroop Kumar100% (1)
- Spanning Tree Protocol (STP & RSTP)Document57 pagesSpanning Tree Protocol (STP & RSTP)Peter R. Egli100% (1)
- ArduinoDocument156 pagesArduinoMike Gomez91% (23)
- Pressure Vessel DefinitionDocument2 pagesPressure Vessel DefinitionAriq FauzanNo ratings yet
- Dryer Design, Modeling and Scale-UpDocument70 pagesDryer Design, Modeling and Scale-UpFlávio Carvalho Flávio100% (1)
- Ball Mill CalculationsDocument7 pagesBall Mill CalculationsSSAC PVT.LTD.100% (1)
- DSL Network ArchitecturesDocument16 pagesDSL Network Architecturesdeetz13No ratings yet
- RSTP Cisco WhitepaperDocument15 pagesRSTP Cisco WhitepaperSudipto BhattacharjeeNo ratings yet
- Manual Intecont Tersus PDFDocument176 pagesManual Intecont Tersus PDFDouglas Souza100% (1)
- Comprehensive Plumbing Terms and DefinitionsDocument48 pagesComprehensive Plumbing Terms and DefinitionsLaurence Castillo100% (1)
- Cyber Security Presentation From BarclaysDocument13 pagesCyber Security Presentation From BarclaysChiefSpudNo ratings yet
- Cisco Reference GuideDocument712 pagesCisco Reference GuideFelix GatambiaNo ratings yet
- Capstone TitleDocument14 pagesCapstone TitleRasmiah SambolawanNo ratings yet
- What Is SDHDocument13 pagesWhat Is SDHlomesh1No ratings yet
- FibeAir IP-20C S E C8 2 User Manual Rev EDocument576 pagesFibeAir IP-20C S E C8 2 User Manual Rev EFelix Gatambia100% (2)
- Performance of Rapid Spanning Tree Protocol in Ring Network TopologyDocument22 pagesPerformance of Rapid Spanning Tree Protocol in Ring Network TopologyTIDAKNo ratings yet
- RSTP ProtocolDocument5 pagesRSTP ProtocolaakashtrivediNo ratings yet
- MOXA White Paper Turbo ChainDocument11 pagesMOXA White Paper Turbo ChainErickReyesNo ratings yet
- Ethernet Fault Tolerance and RedundancyDocument9 pagesEthernet Fault Tolerance and RedundancysjpritchardNo ratings yet
- RRPP Configuration: About This ChapterDocument110 pagesRRPP Configuration: About This ChapterjagadeesansaecNo ratings yet
- Chap 3 STP CONCEPTSDocument8 pagesChap 3 STP CONCEPTSdaphnerichel7No ratings yet
- MSTP Technology White PaperDocument28 pagesMSTP Technology White Paperfranc3No ratings yet
- Modules 5 6Document148 pagesModules 5 6Desiree ClarkNo ratings yet
- Bandwidth Management and Loop Prevention in Redundant NetworksDocument12 pagesBandwidth Management and Loop Prevention in Redundant NetworksPape Mignane FayeNo ratings yet
- The Industrial EthernetDocument4 pagesThe Industrial EthernetRaul GonzalezNo ratings yet
- Data Communication in Substation Automation (SAS) - Part 3 - Original - 23369Document8 pagesData Communication in Substation Automation (SAS) - Part 3 - Original - 23369Darpan SaxenaNo ratings yet
- Session 25,26Document14 pagesSession 25,26Arjun NaiduNo ratings yet
- RRPP PDFDocument33 pagesRRPP PDFAsim AwanNo ratings yet
- Data Center SolutionDocument37 pagesData Center SolutionHumbulani D SioboNo ratings yet
- Application-Note_HSR-RSTPDocument10 pagesApplication-Note_HSR-RSTPNagarajan RajaNo ratings yet
- Lec6 STP ConceptsDocument47 pagesLec6 STP Conceptsmarwanosama229No ratings yet
- Cap8 AdvancedSwitchingDocument42 pagesCap8 AdvancedSwitchingJuan Pablo Calderón RojasNo ratings yet
- Chapter 2 PDFDocument72 pagesChapter 2 PDFXa MauNo ratings yet
- STP01 (2)Document66 pagesSTP01 (2)chauhanbinod24No ratings yet
- Ag2017-21 20170801Document34 pagesAg2017-21 20170801brunoscarpaNo ratings yet
- Rethinking The Service Model: Scaling Ethernet To A Million NodesDocument6 pagesRethinking The Service Model: Scaling Ethernet To A Million Nodesbalachandran99No ratings yet
- RSTP 2Document42 pagesRSTP 2preetamnNo ratings yet
- MGG 04 STP EtherChan-UMYDocument62 pagesMGG 04 STP EtherChan-UMYFredy JohsonNo ratings yet
- T2 Na STP WlanDocument113 pagesT2 Na STP WlanHantar SiniNo ratings yet
- MANUAL - DES-1024D - C4 - v4.00 - Dlink Switch 24 PuertosDocument16 pagesMANUAL - DES-1024D - C4 - v4.00 - Dlink Switch 24 PuertosSalquiNo ratings yet
- 01-14 STP RSTP ConfigurationDocument67 pages01-14 STP RSTP ConfigurationKiKi MaNo ratings yet
- SRWE Module 5Document34 pagesSRWE Module 5هبة عمار كاظمNo ratings yet
- RSTPDocument1 pageRSTPClifford DsouzaNo ratings yet
- Network Performance Evaluation For RIP, OSPF and EIGRP Routing ProtocolsDocument4 pagesNetwork Performance Evaluation For RIP, OSPF and EIGRP Routing Protocolsإمحمد السنوسي القزيريNo ratings yet
- Understanding Rapid Spanning Tree Protocol (802.1w)Document17 pagesUnderstanding Rapid Spanning Tree Protocol (802.1w)Shamsul Aww AwwNo ratings yet
- What Is STPDocument3 pagesWhat Is STPSpartacus CaesarNo ratings yet
- WP_Lower_Ethernet_Cost_with_Daisy_ChainDocument4 pagesWP_Lower_Ethernet_Cost_with_Daisy_ChainNándor ZámbóNo ratings yet
- TJ1400 PDocument2 pagesTJ1400 PAndrew PirloNo ratings yet
- Improving_network_convergence_with_MultiDocument9 pagesImproving_network_convergence_with_MultiSoffkaNo ratings yet
- A Survey On TCP (Transmission Control Protocol) and Udp (User Datagram Protocol) Over Aodv Routing ProtocolDocument8 pagesA Survey On TCP (Transmission Control Protocol) and Udp (User Datagram Protocol) Over Aodv Routing Protocolijr_journal100% (1)
- STP Concepts - Rev 2022Document39 pagesSTP Concepts - Rev 2022Rhesa FirmansyahNo ratings yet
- White Paper Turbo ChainDocument11 pagesWhite Paper Turbo ChainDonni AzharNo ratings yet
- Daystar University ACS 351 A Computer Networks 1Document12 pagesDaystar University ACS 351 A Computer Networks 1Marilene Soulfly MercyNo ratings yet
- CCNA InterviewDocument8 pagesCCNA InterviewAli MerajNo ratings yet
- Xgs3700 Stack STP LACPDocument9 pagesXgs3700 Stack STP LACPCuong TranNo ratings yet
- Dept of CSE, Acharya Institutes of TechnologyDocument18 pagesDept of CSE, Acharya Institutes of TechnologyShaishav Shailesh PandyaNo ratings yet
- rfc1388 rfc1723Document29 pagesrfc1388 rfc1723api-3775587No ratings yet
- Assessment System: Take Assessment - Eswitching Chapter 5 - Ccna Exploration: Lan Switching and Wireless (Version 4.0)Document4 pagesAssessment System: Take Assessment - Eswitching Chapter 5 - Ccna Exploration: Lan Switching and Wireless (Version 4.0)Marin MarianNo ratings yet
- Spanning Tree Protocol ThesisDocument7 pagesSpanning Tree Protocol Thesislisamartinezalbuquerque100% (2)
- What Is SDH (Synchronous Digital Hierarchy)Document13 pagesWhat Is SDH (Synchronous Digital Hierarchy)lomesh1No ratings yet
- An Introduction To Packet Switching For Sync EngineersDocument25 pagesAn Introduction To Packet Switching For Sync Engineersmehdi_mehdiNo ratings yet
- L2 - INP-Ethernet-Based Industrial Protocols 2Document30 pagesL2 - INP-Ethernet-Based Industrial Protocols 2nounkhayNo ratings yet
- Application Note ERPS With XMC20Document8 pagesApplication Note ERPS With XMC20KenMillerNo ratings yet
- iPRP: Parallel Redundancy Protocol For IP NetworksDocument4 pagesiPRP: Parallel Redundancy Protocol For IP NetworksUpul JayasingheNo ratings yet
- Product Data Sheet0900aecd8027cb63Document6 pagesProduct Data Sheet0900aecd8027cb63Ambou GomisNo ratings yet
- Connection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksFrom EverandConnection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksNo ratings yet
- Aviat CTR 8300 Data Sheet - Dec 2014Document2 pagesAviat CTR 8300 Data Sheet - Dec 2014Felix Gatambia0% (1)
- Lambda Freq (THZ) Lambda Freq (THZ)Document1 pageLambda Freq (THZ) Lambda Freq (THZ)Felix GatambiaNo ratings yet
- SDH Service Creation Single StationDocument13 pagesSDH Service Creation Single StationFelix GatambiaNo ratings yet
- SDH Trail CreationDocument7 pagesSDH Trail CreationFelix GatambiaNo ratings yet
- PWP Ex Cli User Guide PDFDocument240 pagesPWP Ex Cli User Guide PDFFelix GatambiaNo ratings yet
- PWP Ex Cli User Guide PDFDocument240 pagesPWP Ex Cli User Guide PDFFelix GatambiaNo ratings yet
- Work Sheet TemplateDocument2 pagesWork Sheet TemplateFelix GatambiaNo ratings yet
- CH01Document21 pagesCH01Felix GatambiaNo ratings yet
- NT9.1 SDH Network Takeover TL1 ED01Document31 pagesNT9.1 SDH Network Takeover TL1 ED01Felix GatambiaNo ratings yet
- A Brief Literature Review On Optimization of Plastic Injection Moulding Process Parameters For Various Plastic Materials by Using Taguchi's TechniqueDocument9 pagesA Brief Literature Review On Optimization of Plastic Injection Moulding Process Parameters For Various Plastic Materials by Using Taguchi's TechniqueAnand BhiseNo ratings yet
- St. Joseph's College of Engineering Model Examinations - III April 11Document24 pagesSt. Joseph's College of Engineering Model Examinations - III April 11siri42No ratings yet
- iecWP Internetofthings LR en PDFDocument78 pagesiecWP Internetofthings LR en PDFAbebeNo ratings yet
- Scope: Grade 2 Grade 5 Grade 8Document2 pagesScope: Grade 2 Grade 5 Grade 8Leonardo SivieroNo ratings yet
- CS33 Midterm 2013 Soln AllDocument10 pagesCS33 Midterm 2013 Soln AllMuhtasim Ayaz RahmanNo ratings yet
- Labsheet 2 SolutionDocument5 pagesLabsheet 2 SolutionAbed El Rhman Hamed100% (1)
- Sinumerik 840D Cycles ManualDocument430 pagesSinumerik 840D Cycles ManualSpyros Petrogiannis100% (1)
- A Chromite Sand, Mined, Processed and Marketed in The U.S.A., Offers Unique Advantages To The Foundry IndustryDocument20 pagesA Chromite Sand, Mined, Processed and Marketed in The U.S.A., Offers Unique Advantages To The Foundry IndustrylucianoNo ratings yet
- Drilling and BlastingDocument49 pagesDrilling and BlastingSri KanthNo ratings yet
- Tinker Rasor - Holiday DetectorsDocument12 pagesTinker Rasor - Holiday DetectorstelteguhNo ratings yet
- PLCINSTDocument1,448 pagesPLCINSTCeirSanchezCalderonNo ratings yet
- Fan&Coil - Información TécnicaDocument2 pagesFan&Coil - Información TécnicaCarlos GonzálezNo ratings yet
- Adams Lab ProblemsDocument10 pagesAdams Lab ProblemsAcchyutjhNo ratings yet
- Module-4a - Three Phase Induction Motor: By, Maria Sushma S Assistant Professor Dept of Eee, AtmeceDocument20 pagesModule-4a - Three Phase Induction Motor: By, Maria Sushma S Assistant Professor Dept of Eee, AtmeceDinesh Naik GNo ratings yet
- Indian Standard: Specification For Density HydrometersDocument20 pagesIndian Standard: Specification For Density HydrometersSushil RajakNo ratings yet
- Caisson and PilesDocument5 pagesCaisson and PilesOlga KosuoweiNo ratings yet
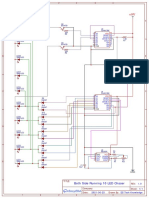
- Schematic - The Both Side Running 10 Led Chaser - 2021-06-25Document1 pageSchematic - The Both Side Running 10 Led Chaser - 2021-06-25julio quatriniNo ratings yet
- The National Art Center TokyoDocument2 pagesThe National Art Center TokyoCendana PutraNo ratings yet
- Rankbio 12Document362 pagesRankbio 12RenugopalNo ratings yet
- Hobart Quantum Manual (En)Document152 pagesHobart Quantum Manual (En)anonymosNo ratings yet
- Grip ShiftDocument2 pagesGrip Shiftdolittle74No ratings yet