You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Introvert Extrovert QuestionnaireDocument2 pagesIntrovert Extrovert QuestionnaireJustin Oliver Hautea67% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Savage Worlds MLP EditionDocument66 pagesSavage Worlds MLP EditionCarsten_Curren_7854100% (8)
- BSED Physical Education (HOPE 3) Sample Daily Lesson LogDocument8 pagesBSED Physical Education (HOPE 3) Sample Daily Lesson LogNeil Jasper Ducut90% (10)
- Grammar TreeDocument72 pagesGrammar TreeniaNo ratings yet
- Chara Dasha Calculation of Mahadasha Anthar Dasha and Prati Anthar DashDocument6 pagesChara Dasha Calculation of Mahadasha Anthar Dasha and Prati Anthar DashSunil RupaniNo ratings yet
- Vassar Industries EEs Union v. Estrella (1978)Document2 pagesVassar Industries EEs Union v. Estrella (1978)GR100% (1)
- Computer Methods For Aerospace Trajectory OptimizationDocument468 pagesComputer Methods For Aerospace Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- Japan's Foreign PolicyDocument18 pagesJapan's Foreign PolicyJustina KiNo ratings yet
- Computer Methods For Orbit TransferDocument344 pagesComputer Methods For Orbit TransferAnonymous REw1YIq4q7No ratings yet
- Lunar Mission AnalysisDocument270 pagesLunar Mission AnalysisAnonymous REw1YIq4q7No ratings yet
- Selenocentric Coordinates and TransformationsDocument9 pagesSelenocentric Coordinates and TransformationsAnonymous REw1YIq4q7No ratings yet
- Atmospheric Reentry Trajectory OptimizationDocument30 pagesAtmospheric Reentry Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- The Gravity Perturbed Hohmann TransferDocument27 pagesThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7No ratings yet
- Computer Methods For Lunar Mission AnalysisDocument422 pagesComputer Methods For Lunar Mission AnalysisAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Document10 pagesA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7No ratings yet
- A MATLAB Script For Propagating Trajectories From The Earth To The MoonDocument33 pagesA MATLAB Script For Propagating Trajectories From The Earth To The MoonAnonymous REw1YIq4q7No ratings yet
- Targeting With Modified Equinoctial Orbital ElementsDocument4 pagesTargeting With Modified Equinoctial Orbital ElementsAnonymous REw1YIq4q7No ratings yet
- The Gravity Perturbed Hohmann TransferDocument24 pagesThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7No ratings yet
- Generalized Linear Targeting and GuidanceDocument11 pagesGeneralized Linear Targeting and GuidanceAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Document32 pagesA Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7No ratings yet
- Lunar Ascent Trajectory OptimizationDocument30 pagesLunar Ascent Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Document10 pagesA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7No ratings yet
- A MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesDocument15 pagesA MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesAnonymous REw1YIq4q7No ratings yet
- Gravity-Assist Trajectory Analysis (MATLAB)Document27 pagesGravity-Assist Trajectory Analysis (MATLAB)Anonymous REw1YIq4q7No ratings yet
- Earth-to-Mars Mission Design (Fortran)Document50 pagesEarth-to-Mars Mission Design (Fortran)Anonymous REw1YIq4q7No ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Document22 pagesA Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Anonymous REw1YIq4q7No ratings yet
- A Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesDocument17 pagesA Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesAnonymous REw1YIq4q7No ratings yet
- Converting An ECI State Vector To Hyperbolic CoordinatesDocument5 pagesConverting An ECI State Vector To Hyperbolic CoordinatesAnonymous REw1YIq4q7No ratings yet
- Impulsive Hyperbolic Injection From A Circular Earth Park Orbit (MATLAB)Document9 pagesImpulsive Hyperbolic Injection From A Circular Earth Park Orbit (MATLAB)Anonymous REw1YIq4q7No ratings yet
- A Computer Program For Interplanetary Gravity-Assist Trajectory Design and Optimization (Fortran)Document20 pagesA Computer Program For Interplanetary Gravity-Assist Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7No ratings yet
- The Selfish Giant: Oscar WildeDocument4 pagesThe Selfish Giant: Oscar WildeAdella SisiNo ratings yet
- Do Do: Afirmative Negative InterrogativeDocument4 pagesDo Do: Afirmative Negative InterrogativeRenzo Chura100% (1)
- Creative Nonfiction SLHT 3Document4 pagesCreative Nonfiction SLHT 3Richard JalangNo ratings yet
- Family LW Iringa University CollegeDocument51 pagesFamily LW Iringa University CollegeRANDAN SADIQNo ratings yet
- Fulltext 01Document54 pagesFulltext 01Shafayet UddinNo ratings yet
- 20 Animal Riddles For KidsDocument3 pages20 Animal Riddles For KidsMaedel GarciaNo ratings yet
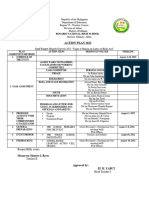
- Action Plan - Brigada Eskwela 2022Document1 pageAction Plan - Brigada Eskwela 2022Anna Lou R. retubaNo ratings yet
- TRUST AND OBEY Victory in Jesus Marvelous Grace City of Gold Paid in FullDocument94 pagesTRUST AND OBEY Victory in Jesus Marvelous Grace City of Gold Paid in FullVincent MadrideNo ratings yet
- 2 IndependentThinkingMindDocument21 pages2 IndependentThinkingMindthatfuturecpaNo ratings yet
- October 2012: Questions Must Be Answered in Accordance With The FollowingDocument31 pagesOctober 2012: Questions Must Be Answered in Accordance With The FollowingAndrew CordonNo ratings yet
- RI Family Support Specialists: Navigating The Way To Resources, Support and Better Outcomes For Children and Families (Joanne Quinn)Document1 pageRI Family Support Specialists: Navigating The Way To Resources, Support and Better Outcomes For Children and Families (Joanne Quinn)AUCDNo ratings yet
- UAS Pre ExerciseDocument2 pagesUAS Pre Exerciserain maker100% (2)
- A Model of Small Group Facilitator CompetenciesDocument15 pagesA Model of Small Group Facilitator CompetenciesDebbie FaiguenbaumNo ratings yet
- Relative Reconstructions: Caroline Heycock Can We Arrive at A Unified Picture?Document26 pagesRelative Reconstructions: Caroline Heycock Can We Arrive at A Unified Picture?ayydatboiNo ratings yet
- Practical Research Week 6 7Document7 pagesPractical Research Week 6 7Marlon James TobiasNo ratings yet
- Meghan Quinn Books in Order ChecklistDocument3 pagesMeghan Quinn Books in Order ChecklistGuadalupe Mendez CraveroNo ratings yet
- Cenacle Vol 1 No 4 2014Document95 pagesCenacle Vol 1 No 4 2014GhNo ratings yet
- Class-Ix Chapter-6 Lines and Angles: It Is Denoted byDocument10 pagesClass-Ix Chapter-6 Lines and Angles: It Is Denoted byGuruSeeker11No ratings yet
- TeandahanDocument11 pagesTeandahanElla Dia HebronNo ratings yet
- Monetary and Fiscal PolicyDocument31 pagesMonetary and Fiscal PolicyprasadzinjurdeNo ratings yet
- Damages: Erezo vs. JepteDocument2 pagesDamages: Erezo vs. JepteMeYe OresteNo ratings yet
- Ch-4 GSM Channels - and Interfaces LectureDocument105 pagesCh-4 GSM Channels - and Interfaces LectureShubham GargNo ratings yet
- Journal of Cleaner Production: Christina Maria Dües, Kim Hua Tan, Ming LimDocument8 pagesJournal of Cleaner Production: Christina Maria Dües, Kim Hua Tan, Ming LimAnass CherrafiNo ratings yet