You might also like
- Restricted Boltzmann Machine: Fundamentals and Applications for Unlocking the Hidden Layers of Artificial IntelligenceFrom EverandRestricted Boltzmann Machine: Fundamentals and Applications for Unlocking the Hidden Layers of Artificial IntelligenceNo ratings yet
- Boltzmann MachineDocument6 pagesBoltzmann MachineSanket MishraNo ratings yet
- Hopfield Networks: Fundamentals and Applications of The Neural Network That Stores MemoriesFrom EverandHopfield Networks: Fundamentals and Applications of The Neural Network That Stores MemoriesNo ratings yet
- Boltz321 PDFDocument7 pagesBoltz321 PDFGopi KrishnaNo ratings yet
- Boltzmann MachinesDocument7 pagesBoltzmann Machinessharathyh kumarNo ratings yet
- Hopfield Networks and Boltzman Machines-Part 2Document13 pagesHopfield Networks and Boltzman Machines-Part 2polinati.vinesh2023No ratings yet
- Mathematical Solution Unifying the Four Fundamental Forces in NatureFrom EverandMathematical Solution Unifying the Four Fundamental Forces in NatureNo ratings yet
- Restricted Boltzmann Machines: AbstractDocument21 pagesRestricted Boltzmann Machines: AbstractNasreenNo ratings yet
- Multi-Layer Feed-Forward NetworksDocument6 pagesMulti-Layer Feed-Forward NetworksVishnu DasNo ratings yet
- Introduction To RBMDocument11 pagesIntroduction To RBMEmmanuel MecanosaurioNo ratings yet
- Tutorial - Molecular Simulation Methods With GromacsDocument12 pagesTutorial - Molecular Simulation Methods With GromacsIsis BugiaNo ratings yet
- On Quantum Computers and Artificial Neural NetworksDocument11 pagesOn Quantum Computers and Artificial Neural NetworksSEP-PublisherNo ratings yet
- Simulated Annealing and The Boltzmann MachineDocument4 pagesSimulated Annealing and The Boltzmann MachineGopal GargNo ratings yet
- 2Document8 pages2Quinone QuentinNo ratings yet
- Deep Boltzmann MachinesDocument8 pagesDeep Boltzmann MachinessitukangsayurNo ratings yet
- Unit III Word NNDocument12 pagesUnit III Word NNJustin CookNo ratings yet
- Some of Quantum Mechanics ConceptsDocument12 pagesSome of Quantum Mechanics Conceptsrafalalhussaini79No ratings yet
- Final Project Report PDFDocument20 pagesFinal Project Report PDFYuvraaj Kumar100% (2)
- Black Holes Lecture UCSD Physics 161Document76 pagesBlack Holes Lecture UCSD Physics 161Rujual BainsNo ratings yet
- Assignment by Sampurnanand MishraDocument15 pagesAssignment by Sampurnanand MishraSaroj SharmaNo ratings yet
- Boltzmann DistributionDocument7 pagesBoltzmann Distributionhobson616No ratings yet
- Quantum Teleportation Circuit Using Matlab and Mathematica: Ms - Swati Sharma, Prof Asok De, Prof S.N KulkarniDocument4 pagesQuantum Teleportation Circuit Using Matlab and Mathematica: Ms - Swati Sharma, Prof Asok De, Prof S.N KulkarniBbaPbaNo ratings yet
- Ec6405 NotesDocument66 pagesEc6405 NotesmenakaNo ratings yet
- Entropy Information and Homeostasis in CyberneticsDocument7 pagesEntropy Information and Homeostasis in CyberneticsMartin DimitrovNo ratings yet
- Physics Depth StudyDocument17 pagesPhysics Depth StudyHerbertNo ratings yet
- Fancier Version PhysicsDocument4 pagesFancier Version Physicsmuhammad azizNo ratings yet
- Lloyd 1993Document4 pagesLloyd 1993Herve HerveNo ratings yet
- Parallelized Deep Neural NetworksDocument34 pagesParallelized Deep Neural NetworksLance LegelNo ratings yet
- Study Materials - Restricted Boltzmann MachineDocument6 pagesStudy Materials - Restricted Boltzmann MachineDhaarani PushpamNo ratings yet
- A Potentially Realizable Quantum Computer - Lloyd 1993Document3 pagesA Potentially Realizable Quantum Computer - Lloyd 1993John CooganNo ratings yet
- TMP 9 D48Document6 pagesTMP 9 D48FrontiersNo ratings yet
- 05 07 WiedermannDocument10 pages05 07 WiedermannTudor VoiceanuNo ratings yet
- Quantum ComputingDocument7 pagesQuantum ComputingticNo ratings yet
- 1 Stochastic Networks: Boltzmann MachinesDocument4 pages1 Stochastic Networks: Boltzmann Machinesvarsha raichalNo ratings yet
- 1973 - Journal of Structural Mechanics - 1 - 497-518 - WITTRICKW-An Algorithm For Computing Critical Buckling Loads of Elastic StructuresDocument23 pages1973 - Journal of Structural Mechanics - 1 - 497-518 - WITTRICKW-An Algorithm For Computing Critical Buckling Loads of Elastic StructuresZhangJiayongNo ratings yet
- An Efficient Learning Procedure For Deep Boltzmann MachinesDocument40 pagesAn Efficient Learning Procedure For Deep Boltzmann Machinesfabiohh90No ratings yet
- Statistical Physics: An Introduction in Two Parts: I. From Particle Interactions To Macroscopic BehaviorsDocument1 pageStatistical Physics: An Introduction in Two Parts: I. From Particle Interactions To Macroscopic BehaviorsChakra Sowmya NarayanNo ratings yet
- Lab Work 4. Motion of A Charged Particle in An Electric Field 222131Document6 pagesLab Work 4. Motion of A Charged Particle in An Electric Field 222131daniyar.kanuNo ratings yet
- Nips00 YwtDocument7 pagesNips00 YwtmikeNo ratings yet
- Physical Principles Underpinning Quantum ComputingDocument6 pagesPhysical Principles Underpinning Quantum ComputingAfzaal GhaziNo ratings yet
- Equation of State Calculations by Fast Computing Machines: Additional Information On J. Chem. PhysDocument7 pagesEquation of State Calculations by Fast Computing Machines: Additional Information On J. Chem. PhysIndra Prakash JhaNo ratings yet
- B.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsDocument14 pagesB.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsMaxnamewNo ratings yet
- Monte-Carlo Study of The 2D Ising ModelDocument24 pagesMonte-Carlo Study of The 2D Ising ModelJesse RossNo ratings yet
- A Student Guide To Clasical ControlDocument5 pagesA Student Guide To Clasical ControlSusana Vázquez VallínNo ratings yet
- A True Maxwell's Demon: The Physical Mechanism of The Charge's Negative Entropy Reordering OperationDocument9 pagesA True Maxwell's Demon: The Physical Mechanism of The Charge's Negative Entropy Reordering OperationAkshaya Kumar RathNo ratings yet
- Muller Ejp 14Document8 pagesMuller Ejp 14CarlosBuriticaNo ratings yet
- SY - Electric Potential EnergyDocument3 pagesSY - Electric Potential EnergyNeelam KapoorNo ratings yet
- Physics Lab Report 5Document3 pagesPhysics Lab Report 5Catherine Linsley0% (1)
- Assignment Neural NetworksDocument7 pagesAssignment Neural NetworksSagar SharmaNo ratings yet
- Callen 15Document21 pagesCallen 15Fani DosopoulouNo ratings yet
- Vibrations Lab ReportDocument16 pagesVibrations Lab ReportJawad Hussain100% (1)
- Lumped Element ModelDocument6 pagesLumped Element ModelLuis PressoNo ratings yet
- Letter: Quantum Annealing With Manufactured SpinsDocument5 pagesLetter: Quantum Annealing With Manufactured SpinsnhdalkNo ratings yet
- Physical Limits of InferenceDocument42 pagesPhysical Limits of Inferencegumel99No ratings yet
- Quantum Computing With Quantum DotsDocument17 pagesQuantum Computing With Quantum DotsShane Vitarana100% (1)
- Salinas SolutionDocument40 pagesSalinas SolutionRodolfo AraújoNo ratings yet
- PhysRevX 9 031009Document21 pagesPhysRevX 9 031009Marc de MiguelNo ratings yet
- 08 InhomogeneousUniverse 3Document29 pages08 InhomogeneousUniverse 3João SenaNo ratings yet
- MarbiehistoryDocument6 pagesMarbiehistoryMarbie DalanginNo ratings yet
- Updated G10 Class Routine Effective From 12 January 2023Document1 pageUpdated G10 Class Routine Effective From 12 January 2023NiloyNo ratings yet
- Pediatric EmergenciesDocument47 pagesPediatric EmergenciesahmedNo ratings yet
- Twilight PrincessDocument49 pagesTwilight PrincessHikari DiegoNo ratings yet
- TreesDocument69 pagesTreesADITYA GEHLAWATNo ratings yet
- Oil Whirl and Whip Instabilities - Within Journal BearingsDocument27 pagesOil Whirl and Whip Instabilities - Within Journal BearingsTalha AamirNo ratings yet
- Lafarge Interior Building Solutions BrochureDocument24 pagesLafarge Interior Building Solutions BrochuretwinpixtwinpixNo ratings yet
- The Broadband ForumDocument21 pagesThe Broadband ForumAnouar AleyaNo ratings yet
- 3rd Quarter Exam (Statistics)Document4 pages3rd Quarter Exam (Statistics)JERALD MONJUANNo ratings yet
- Material Specification - 077154C-000-JSS-1700-009 - DDocument13 pagesMaterial Specification - 077154C-000-JSS-1700-009 - DStructures ProductionNo ratings yet
- Better - Homes.and - Gardens.usa - TruePDF December.2018Document136 pagesBetter - Homes.and - Gardens.usa - TruePDF December.2018MadaMadutsaNo ratings yet
- 14p-220 Mud PumpDocument2 pages14p-220 Mud PumpMurali Sambandan50% (2)
- Drilling & GroutingDocument18 pagesDrilling & GroutingSantosh Laxman PatilNo ratings yet
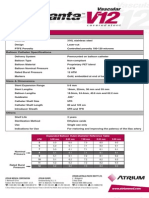
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiNo ratings yet
- Purpose in LifeDocument1 pagePurpose in Lifeaashish95100% (1)
- Crouse Hinds XPL Led BrochureDocument12 pagesCrouse Hinds XPL Led BrochureBrayan Galaz BelmarNo ratings yet
- 2022 Audi e Tron 22Document318 pages2022 Audi e Tron 22Alejandro Alberto Robalino MendezNo ratings yet
- Bảng giá FLUKEDocument18 pagesBảng giá FLUKEVăn Long NguyênNo ratings yet
- 12 Key Principles On Bhava AnalysisDocument28 pages12 Key Principles On Bhava AnalysisDhineshNo ratings yet
- SP Essay 1Document14 pagesSP Essay 1api-511870420No ratings yet
- FemDocument4 pagesFemAditya SharmaNo ratings yet
- Nivel VV-VW Board User Guide enDocument5 pagesNivel VV-VW Board User Guide enHarveyWishtartNo ratings yet
- Bomba MixerDocument2 pagesBomba MixerBinelli79No ratings yet
- GP1 Q1 Week-1Document18 pagesGP1 Q1 Week-1kickyknacksNo ratings yet
- Assignment 2 Mat435Document2 pagesAssignment 2 Mat435Arsene LupinNo ratings yet
- Column, Slab, Footing and Wall Footing Foundations: Class A MixingDocument47 pagesColumn, Slab, Footing and Wall Footing Foundations: Class A MixingGioharry Nul PanambulanNo ratings yet
- Parts Catalogue of Foton: (TC2A504-034K)Document132 pagesParts Catalogue of Foton: (TC2A504-034K)МаксимNo ratings yet
- Math COT 3Document18 pagesMath COT 3Icy Mae SenadosNo ratings yet
- Douluo Dalu Volume 05 - Star Dou Forest PDFDocument141 pagesDouluo Dalu Volume 05 - Star Dou Forest PDFRay Joseph LealNo ratings yet
- Gemh 108Document20 pagesGemh 108YuvrajNo ratings yet