You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TADM10 - 1 Test QuestionsDocument7 pagesTADM10 - 1 Test QuestionsWilson Lima100% (1)
- Custom SoCs For IoT SimplifiedDocument22 pagesCustom SoCs For IoT SimplifiedRohan PeterNo ratings yet
- Perl Learning Material IDocument13 pagesPerl Learning Material IRohan PeterNo ratings yet
- Hard and Soft Embedded FPGA Processor Systems Design: Design Considerations and Performance ComparisonsDocument22 pagesHard and Soft Embedded FPGA Processor Systems Design: Design Considerations and Performance ComparisonsRohan PeterNo ratings yet
- Clock Domain Crossing (CDC) : Erik Seligman CS 510, Lecture 17, March 2009Document39 pagesClock Domain Crossing (CDC) : Erik Seligman CS 510, Lecture 17, March 2009Rohan PeterNo ratings yet
- What Is The Mtogas Virus and How Does It Work?Document2 pagesWhat Is The Mtogas Virus and How Does It Work?Christopher PantojaNo ratings yet
- Digital Malware AnalysisDocument2 pagesDigital Malware AnalysisAnkur SinghNo ratings yet
- Thomas Case StudyreportDocument11 pagesThomas Case Studyreport21UCS152 J.MICHEAL AUGUSTINNo ratings yet
- Types of Keys Used in HotelsDocument9 pagesTypes of Keys Used in HotelsJulius Retiro de la CruzNo ratings yet
- Tutorial 9 - AnswerDocument3 pagesTutorial 9 - AnswerlovelovengNo ratings yet
- Solicitation W56JSR 17 R 0004Document69 pagesSolicitation W56JSR 17 R 0004zNo ratings yet
- Assignement 4Document6 pagesAssignement 4sam khanNo ratings yet
- Darkode 2019 ChargesDocument32 pagesDarkode 2019 ChargesCatalin Cimpanu [ZDNet]No ratings yet
- Analysis of Cobalt Attacks On FinancialDocument20 pagesAnalysis of Cobalt Attacks On FinancialYanNo ratings yet
- CS507 Solved Quiz DatedDocument11 pagesCS507 Solved Quiz DatedKhurram KoolNo ratings yet
- Assignment ReportDocument9 pagesAssignment ReportThomas Musyoka PhilipNo ratings yet
- Overview of BlockchainDocument9 pagesOverview of Blockchainoshwa_ishNo ratings yet
- Eagle Drive - Department of Computer Science PublicationDocument32 pagesEagle Drive - Department of Computer Science PublicationCarson SmithNo ratings yet
- 04 - CN67484EN40GLA0 - NT HLR SecurityDocument64 pages04 - CN67484EN40GLA0 - NT HLR Securitysaurabh singhNo ratings yet
- Nist Fips 140-3 PDFDocument11 pagesNist Fips 140-3 PDFJhon RojasNo ratings yet
- CNS Labmanual 2024Document71 pagesCNS Labmanual 2024srikanthNo ratings yet
- Anti Virus Best Practices PDFDocument8 pagesAnti Virus Best Practices PDFkprasad_mlNo ratings yet
- Lecture 3Document49 pagesLecture 3Opoka John ModiNo ratings yet
- Wepik Strengthening Digital Defenses An in Depth Exploration of Cyber Security 20231121043209BlIPDocument12 pagesWepik Strengthening Digital Defenses An in Depth Exploration of Cyber Security 20231121043209BlIPsuchdev darshanNo ratings yet
- Bit-Level Encryption and Decryption of Images Using Genetic Algorithm: A New ApproachDocument5 pagesBit-Level Encryption and Decryption of Images Using Genetic Algorithm: A New ApproachInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
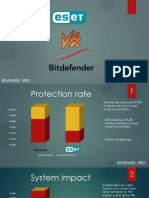
- Bitdefender VS Eset PDFDocument8 pagesBitdefender VS Eset PDFcatalin ionNo ratings yet
- 1da19is005 (Activity Points Report)Document28 pages1da19is005 (Activity Points Report)Santhosh NNo ratings yet
- Z Fortigate Hardening Your Fortigate 56 PDFDocument12 pagesZ Fortigate Hardening Your Fortigate 56 PDFCristian Ezequiel IbiriNo ratings yet
- MIS Case Study 1 Makinde Oyedemi PHDDocument4 pagesMIS Case Study 1 Makinde Oyedemi PHDmakintosh0370100% (1)
- BookletDocument51 pagesBookletsuraj karNo ratings yet
- SY0-101 CompTIA SY0-101 Security+ Version 24.0Document705 pagesSY0-101 CompTIA SY0-101 Security+ Version 24.0billnpattiNo ratings yet
- CCNA Security: Chapter Nine Managing A Secure NetworkDocument71 pagesCCNA Security: Chapter Nine Managing A Secure NetworkAmine InpticNo ratings yet
- 01 - Overview and IntroductionDocument26 pages01 - Overview and IntroductionAjay GowthamNo ratings yet
- IISc Email First Login Procedure SSPR Enabled Time Zone With MFADocument12 pagesIISc Email First Login Procedure SSPR Enabled Time Zone With MFAMunish SharmaNo ratings yet