You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5809)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Design and Analysis of Horizontal Steam Pressure VesselDocument41 pagesDesign and Analysis of Horizontal Steam Pressure VesselVitor OlivettiNo ratings yet
- Aqua 1Document324 pagesAqua 1staryklt100% (1)
- Uow009699 Building Elements Commissioning StandardDocument28 pagesUow009699 Building Elements Commissioning StandardstarykltNo ratings yet
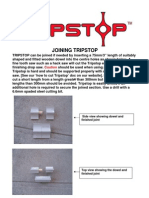
- Ts Join GuideDocument1 pageTs Join GuidestarykltNo ratings yet
- Uow009694 Hydraulic Services Design StandardsDocument37 pagesUow009694 Hydraulic Services Design StandardsstarykltNo ratings yet
- Glossary of Home Construction Terms - HCM-04759Document15 pagesGlossary of Home Construction Terms - HCM-04759starykltNo ratings yet
- Floor Waste Installation OverviewDocument2 pagesFloor Waste Installation OverviewstarykltNo ratings yet
- Power System Sizing Form: G G G GDocument4 pagesPower System Sizing Form: G G G GstarykltNo ratings yet
- Residential Electric Service InstallationDocument56 pagesResidential Electric Service InstallationJ Hevesi100% (1)
- Guide To Concrete RepairDocument168 pagesGuide To Concrete Repairhansen_zinck4751100% (11)
- 7123AF Aquatherm Fusiotherm Hot & Cold Water System 2010Document9 pages7123AF Aquatherm Fusiotherm Hot & Cold Water System 2010starykltNo ratings yet
- Enclosed Shower BaysetDocument2 pagesEnclosed Shower BaysetstarykltNo ratings yet
- 0 - Mains Water Pipe SizingDocument4 pages0 - Mains Water Pipe SizingstarykltNo ratings yet
- 0621 SIKA Waterproofing - Wet AreasDocument12 pages0621 SIKA Waterproofing - Wet Areasstaryklt100% (1)
- Bbse3006 1011 05-Waterside01Document60 pagesBbse3006 1011 05-Waterside01starykltNo ratings yet
- MEN System of EarthningDocument6 pagesMEN System of EarthningstarykltNo ratings yet
- @@@ Geothermal-WellsDocument44 pages@@@ Geothermal-WellsstarykltNo ratings yet
- Ceramic Tilles Installation ManualDocument16 pagesCeramic Tilles Installation ManualstarykltNo ratings yet
- Specification For Stop ValvesDocument9 pagesSpecification For Stop ValvesstarykltNo ratings yet
- Bbse3006 1011 05-Waterside01Document60 pagesBbse3006 1011 05-Waterside01starykltNo ratings yet
- Appendix 07 - Deliverables - Detailed SubmissionDocument10 pagesAppendix 07 - Deliverables - Detailed SubmissionstarykltNo ratings yet
- Mebs6000 1011 01 Cold & Flush WaterDocument70 pagesMebs6000 1011 01 Cold & Flush Waterstaryklt100% (1)
- LKPD Kelas XiiDocument32 pagesLKPD Kelas XiiOrpa Luisa100% (5)
- The Ultimate Guide To Project Documentation (With Free Template)Document11 pagesThe Ultimate Guide To Project Documentation (With Free Template)Marlene BritoNo ratings yet
- MA Finbrinolisis en CRAODocument7 pagesMA Finbrinolisis en CRAOFrancisco Palma CarvajalNo ratings yet
- ME730A - Modal Analysis: Theory and PracticeDocument5 pagesME730A - Modal Analysis: Theory and PracticePankaj KumarNo ratings yet
- Tristan Walde Personal PhilosophyDocument4 pagesTristan Walde Personal Philosophyapi-301442880No ratings yet
- Satzewich - The Ukranian DiasporaDocument275 pagesSatzewich - The Ukranian DiasporaMihai IonitaNo ratings yet
- Translation Methods Applied in The IndonDocument6 pagesTranslation Methods Applied in The IndonAinul Yakien MNo ratings yet
- Span 141 Syllabus and Course Calendar - Spring 2011Document15 pagesSpan 141 Syllabus and Course Calendar - Spring 2011Jefferson BadgerNo ratings yet
- Custom Dictionaries in Computer-Aided Text AnalysisDocument13 pagesCustom Dictionaries in Computer-Aided Text AnalysisTerry College of BusinessNo ratings yet
- Dhreg, Xtdhreg, and Bootdhreg: Commands To Implement Double-Hurdle RegressionDocument20 pagesDhreg, Xtdhreg, and Bootdhreg: Commands To Implement Double-Hurdle RegressiondemistesfawNo ratings yet
- Etabs Pushover PDFDocument2 pagesEtabs Pushover PDFGregoryNo ratings yet
- Shell Gadus s2 V460a 2Document2 pagesShell Gadus s2 V460a 2Dhavit WijayantoNo ratings yet
- Process Management The Boat Exercise: Process Managem Ent Is FunDocument4 pagesProcess Management The Boat Exercise: Process Managem Ent Is Funschizm2No ratings yet
- Best Training Institute in Uae PDFDocument5 pagesBest Training Institute in Uae PDFAnnex InstituteNo ratings yet
- Mikhail Bulgakov: The Theme of Evil IN Master I MargaritaDocument248 pagesMikhail Bulgakov: The Theme of Evil IN Master I MargaritaGabriela CheaptanaruNo ratings yet
- HvpeDocument122 pagesHvpeAmitNo ratings yet
- Gayle CV TeachingDocument6 pagesGayle CV TeachingggNo ratings yet
- Pilot Study MethodologyDocument5 pagesPilot Study MethodologyThierry UhawenimanaNo ratings yet
- ICC Job Advert Development Officer Americas 1Document2 pagesICC Job Advert Development Officer Americas 1Anant SarkariaNo ratings yet
- A Study On Analyzing Levels Of: Master of Business AdministrationDocument107 pagesA Study On Analyzing Levels Of: Master of Business AdministrationTanuja JhaNo ratings yet
- Technical Bulletin: Updating The CELLCHECK-400 Set Values Used For WBC SensitivitiesDocument2 pagesTechnical Bulletin: Updating The CELLCHECK-400 Set Values Used For WBC SensitivitiesYANISSE BADNo ratings yet
- 2011 Calendar (Hindi, Gujarati, Marathi, Telugu, Tamil, Kannada, Punjabi) For Mumbai MaharastraDocument28 pages2011 Calendar (Hindi, Gujarati, Marathi, Telugu, Tamil, Kannada, Punjabi) For Mumbai MaharastramaheshupNo ratings yet
- FUNARI, P. Archaeology, History, and Historical Archaeology in South America. 1997 PDFDocument17 pagesFUNARI, P. Archaeology, History, and Historical Archaeology in South America. 1997 PDFMartín Maldonado ParadaNo ratings yet
- Business Ethics AssignmentDocument6 pagesBusiness Ethics AssignmentAlif AnasNo ratings yet
- Worksheet Works Comparative and Superlative Adjectives 2Document3 pagesWorksheet Works Comparative and Superlative Adjectives 2Bongkotratt CharuchindaNo ratings yet
- TjmnamesDocument5 pagesTjmnamesFarid BenhamidaNo ratings yet
- Aspen Hysys SimulationDocument5 pagesAspen Hysys SimulationEngr Mohammad FarhanNo ratings yet
- Compiled ABS EducationDocument6 pagesCompiled ABS EducationpbariarNo ratings yet
- HTML Notes For BeginnersDocument10 pagesHTML Notes For BeginnersAman BaranwalNo ratings yet