You might also like
- Unsupervised Learning Clustering IIDocument17 pagesUnsupervised Learning Clustering IIarif.ishaan99No ratings yet
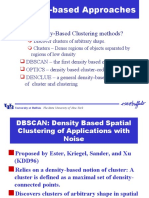
- DBSCANDocument42 pagesDBSCANY SAHITHNo ratings yet
- DBSCAN PresentationDocument10 pagesDBSCAN PresentationRosemelyne WartdeNo ratings yet
- 7- Chapter 7-Chapter 7 -Density-Based Clustering MethodsDocument30 pages7- Chapter 7-Chapter 7 -Density-Based Clustering Methodsmazeen naserNo ratings yet
- BirchDocument6 pagesBirchhehehenotyoursNo ratings yet
- DBSCAN Density-Based Clustering Algorithm ExplainedDocument12 pagesDBSCAN Density-Based Clustering Algorithm ExplainedRohit PaulNo ratings yet
- DBSCANDocument3 pagesDBSCANyevedi5237No ratings yet
- DBSCAN Clustering Algorithm: Presented byDocument22 pagesDBSCAN Clustering Algorithm: Presented byJarir AhmedNo ratings yet
- DBSCANDocument18 pagesDBSCANnilabjyaghoshNo ratings yet
- DBSCAN AlgorithmDocument15 pagesDBSCAN AlgorithmMukesh GautamNo ratings yet
- Parallel Implementation of OPTICS AlgorithmDocument10 pagesParallel Implementation of OPTICS Algorithmzii.wang626No ratings yet
- Density BasedDocument52 pagesDensity BaseddevibalaNo ratings yet
- Dbscan: Densiy Based Scan AlgorithmDocument8 pagesDbscan: Densiy Based Scan AlgorithmpritinaiduNo ratings yet
- 6 Most ImpDocument17 pages6 Most Impsuchi87No ratings yet
- Clustering Others EvaluationDocument70 pagesClustering Others EvaluationKathy KgNo ratings yet
- CSE4014 - High Performance Computing (EPJ) : Submitted by Project GuideDocument12 pagesCSE4014 - High Performance Computing (EPJ) : Submitted by Project GuideAshish PaudelNo ratings yet
- DBSCAN Density-Based Clustering GuideDocument14 pagesDBSCAN Density-Based Clustering GuideamjadNo ratings yet
- Db ScanDocument7 pagesDb ScanUJJAWAL PUGALIANo ratings yet
- Chapter 4Document57 pagesChapter 4Krishna Rana MagarNo ratings yet
- Spectral Envelope Estimation and Representation For Sound Analysis-SynthesisDocument4 pagesSpectral Envelope Estimation and Representation For Sound Analysis-SynthesisHussein RazaqNo ratings yet
- Bezier Curve For Image ReconstructionDocument4 pagesBezier Curve For Image Reconstructionsyamsulrizal123No ratings yet
- Dominant Wavelength and Purity: Technical Note on Characterizing Light SourcesDocument1 pageDominant Wavelength and Purity: Technical Note on Characterizing Light SourcesguangbengNo ratings yet
- Digital - Image - Processing - 2 Lec 1 PDFDocument56 pagesDigital - Image - Processing - 2 Lec 1 PDFsnake teethNo ratings yet
- Orthogonal Biorthogonal and Simplex SignalsDocument17 pagesOrthogonal Biorthogonal and Simplex Signalsindameantime5655No ratings yet
- Basic Electronics Course OverviewDocument30 pagesBasic Electronics Course OverviewNithish KolliNo ratings yet
- Data Communication AssigmentDocument6 pagesData Communication AssigmentAsif AhmedNo ratings yet
- 20 - 1 - ML - Unsup - 03 - Dbscan HdbscanDocument21 pages20 - 1 - ML - Unsup - 03 - Dbscan HdbscanMohitKhemkaNo ratings yet
- Lec.1n - COMM 552 Information Theory and CodingDocument25 pagesLec.1n - COMM 552 Information Theory and CodingDonia Mohammed AbdeenNo ratings yet
- Density Based ClusteringDocument22 pagesDensity Based Clusteringanon_857439662No ratings yet
- Density BasedDocument52 pagesDensity BasedCloneNo ratings yet
- Optimum Global Thresholding Using Otsu's MethodDocument5 pagesOptimum Global Thresholding Using Otsu's MethodMay Phyu KhinNo ratings yet
- Spatial Databse Indexing On RNN Query SummatyDocument3 pagesSpatial Databse Indexing On RNN Query Summatyvicky101No ratings yet
- Pitch Estimation Using A Full/Multi-Band Approaches: Mikhail Tadjikov, Arya AhmadiDocument5 pagesPitch Estimation Using A Full/Multi-Band Approaches: Mikhail Tadjikov, Arya AhmadiVinayaka SwamyNo ratings yet
- Density BasedDocument52 pagesDensity BasedNermine LimemeNo ratings yet
- Notes on Discrete Fourier Transforms (DFTDocument4 pagesNotes on Discrete Fourier Transforms (DFTSachin PatiNo ratings yet
- Lazy Learners Unit 2Document26 pagesLazy Learners Unit 2ManshiNo ratings yet
- Principles Comm EXP 4 Student ManualDocument5 pagesPrinciples Comm EXP 4 Student Manualxyzmd2000No ratings yet
- Introduction To Machine Learning: K-Nearest Neighbor AlgorithmDocument25 pagesIntroduction To Machine Learning: K-Nearest Neighbor AlgorithmAlwan SiddiqNo ratings yet
- Lossless Data CompressionDocument24 pagesLossless Data Compressionsojdeep_nagra24No ratings yet
- Multi Density DBScanDocument8 pagesMulti Density DBScanVangelis TaratorisNo ratings yet
- DFTDocument5 pagesDFTManojChowdaryNo ratings yet
- Lecture 07 KNN 14112022 034756pmDocument24 pagesLecture 07 KNN 14112022 034756pmMisbah100% (1)
- DIP Lab 13 DBSCAN ClusteringDocument6 pagesDIP Lab 13 DBSCAN Clusteringmahadm.bscs21seecsNo ratings yet
- Assignment 5 CH-4 Cce-211Document14 pagesAssignment 5 CH-4 Cce-211Sadia Islam ShefaNo ratings yet
- Compression For Sending and Storing Information: Text, Audio, Images, VideosDocument28 pagesCompression For Sending and Storing Information: Text, Audio, Images, VideosPradeep RamuNo ratings yet
- Section 15 - Digital CommunicationsDocument27 pagesSection 15 - Digital CommunicationsCherryl Mae Almojuela0% (1)
- Deformable Contours for Edge DetectionDocument7 pagesDeformable Contours for Edge DetectionNITHIN NAKULANNo ratings yet
- Data Mining Lecture 1 - SummaryDocument3 pagesData Mining Lecture 1 - SummaryYaksh ShahNo ratings yet
- DBSCAN Clustering Algorithm ExplainedDocument10 pagesDBSCAN Clustering Algorithm ExplainedeimisjaneisiNo ratings yet
- WINSEM2020-21 ECE4010 TH VL2020210503189 Reference Material I 03-Apr-2021 Part IVDocument25 pagesWINSEM2020-21 ECE4010 TH VL2020210503189 Reference Material I 03-Apr-2021 Part IVAryan VermaNo ratings yet
- ITC 2marks NewDocument34 pagesITC 2marks NewSaravanan GNo ratings yet
- HTVT 2Document153 pagesHTVT 2Vo Phong PhuNo ratings yet
- Digital Signal Processing AssignmentDocument1 pageDigital Signal Processing Assignmentruss90No ratings yet
- Spectral Compressive Sensing for Frequency-Sparse SignalsDocument38 pagesSpectral Compressive Sensing for Frequency-Sparse Signalspavan2446No ratings yet
- COMMUNICATION THEORY FUNDAMENTALSDocument13 pagesCOMMUNICATION THEORY FUNDAMENTALSnitalizNo ratings yet
- Midterm Review: STAT 5301/MATH 5310 Key ConceptsDocument6 pagesMidterm Review: STAT 5301/MATH 5310 Key ConceptsDenish ShresthaNo ratings yet
- Mergesort: Algorithm: Design & AnalysisDocument26 pagesMergesort: Algorithm: Design & AnalysisIbrahim HawariNo ratings yet
- Btech Syllabus Rtu 3-8 SemesterDocument86 pagesBtech Syllabus Rtu 3-8 SemesterSanat SharmaNo ratings yet
- Objective of CDDocument30 pagesObjective of CDSrinivas Rao YendaNo ratings yet
- FFDocument4 pagesFFvNo ratings yet
- Naive Bayes PDFDocument5 pagesNaive Bayes PDFvNo ratings yet
- Pseudo Residual Revisited PDFDocument2 pagesPseudo Residual Revisited PDFvNo ratings yet
- Prog CPPDocument736 pagesProg CPPMarcus RGNo ratings yet
- Section ViewsDocument34 pagesSection ViewsSuzzane Pearl FulgarNo ratings yet
- Munication SystemDocument341 pagesMunication SystemNikhil SinghNo ratings yet
- Object RecognitionDocument98 pagesObject RecognitionBarga SP DeoriNo ratings yet
- Scip y LecturesDocument329 pagesScip y Lecturesv100% (1)
- PRACTICAL GEOMETRY Basic Intro & ProjectionsDocument38 pagesPRACTICAL GEOMETRY Basic Intro & ProjectionsvNo ratings yet
- Physics II SPDocument158 pagesPhysics II SPvNo ratings yet
- CT Solved PaperDocument96 pagesCT Solved PapervNo ratings yet
- Geometry Vocabulary: Mr. Fiore & Mr. RyanDocument22 pagesGeometry Vocabulary: Mr. Fiore & Mr. RyanvNo ratings yet
- Doctor of PhilosophyDocument2 pagesDoctor of PhilosophyvNo ratings yet
- IIS University: Fundamentals of E-Commerce BBM 506Document2 pagesIIS University: Fundamentals of E-Commerce BBM 506vNo ratings yet
- DebatesDocument76 pagesDebatesvNo ratings yet