You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Fire and Rescue Force Act, 2008Document22 pagesFire and Rescue Force Act, 2008Jeremia Mtobesya75% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Deathwatch Game Master's Kit (Screen) PDFDocument2 pagesDeathwatch Game Master's Kit (Screen) PDFSergio Morales100% (1)
- Tim Redmer AccountingDocument204 pagesTim Redmer AccountingDax100% (5)
- Currency ListDocument5 pagesCurrency Listanon_878976340100% (1)
- 802-CBN-00-PR-CE-LIFTING PROCEDURE-049-B of Civil Construction and Infrastructure Works, Stage 2Document12 pages802-CBN-00-PR-CE-LIFTING PROCEDURE-049-B of Civil Construction and Infrastructure Works, Stage 2Agus SupriadiNo ratings yet
- Balashov - Et Al - 2021 - Metacognitive Awareness and Academic Self-Regulation of HEI StudentsDocument12 pagesBalashov - Et Al - 2021 - Metacognitive Awareness and Academic Self-Regulation of HEI StudentsHernán Robledo NakagawaNo ratings yet
- Biomedical Instrumentation I: Lecture-5: The Origin of BiopotentialsDocument35 pagesBiomedical Instrumentation I: Lecture-5: The Origin of BiopotentialsNitin PrajapatiNo ratings yet
- Omex Tech Co., Limited: OMT Water Filter IntroductionDocument3 pagesOmex Tech Co., Limited: OMT Water Filter IntroductionAleksandar KlipićNo ratings yet
- Antrenament - Caiet de Lucru Al AntrenoruluiDocument134 pagesAntrenament - Caiet de Lucru Al AntrenoruluialeksandraNo ratings yet
- Spanish III - Mis Actividades Extracurriculares Rubric - MostupdatedDocument2 pagesSpanish III - Mis Actividades Extracurriculares Rubric - Mostupdatedapi-296053154No ratings yet
- Camberley Mosque Calendar 2020 PDFDocument12 pagesCamberley Mosque Calendar 2020 PDFJack JonesNo ratings yet
- Aluminum XHHW-2 600V, XLPE Insulation: ApplicationDocument1 pageAluminum XHHW-2 600V, XLPE Insulation: ApplicationJuan Rivera DuronNo ratings yet
- Drum Sound Design TutorialDocument6 pagesDrum Sound Design Tutorialsdagogy100% (1)
- Modern Solutions To Screen NG Problems: Mogensen SizerDocument8 pagesModern Solutions To Screen NG Problems: Mogensen SizerTsakalakis G. KonstantinosNo ratings yet
- MCQ CPWA Code Chapter-10Document14 pagesMCQ CPWA Code Chapter-10Biswajit JenaNo ratings yet
- Videocon Industries LTDDocument19 pagesVideocon Industries LTDRitika SharmaNo ratings yet
- Release RTWlanUDocument10 pagesRelease RTWlanUNicolas FournierNo ratings yet
- 3 Assumptions and ApproximationsDocument5 pages3 Assumptions and ApproximationsJack RyderNo ratings yet
- Flix BusDocument1 pageFlix BusjakovNo ratings yet
- Fly XPR 5582Document2 pagesFly XPR 5582Miguel Angel Rodriguez FloresNo ratings yet
- Completed Unit II 17.7.17Document113 pagesCompleted Unit II 17.7.17Dr.A.R.KavithaNo ratings yet
- 3.1 ActionDocument2 pages3.1 ActionCynthia AnahiNo ratings yet
- Drama Performance Assessment RubricsDocument2 pagesDrama Performance Assessment RubricsPrincess Lynn PaduaNo ratings yet
- RPMS Porfolio Template (Long)Document3 pagesRPMS Porfolio Template (Long)JohnCzyril Deladia DomensNo ratings yet
- Linked List, Stack, QueueDocument13 pagesLinked List, Stack, QueueTaqi IsmailNo ratings yet
- AntidotesDocument29 pagesAntidotesjyothisahadevanNo ratings yet
- Nature and Concept of ManagementDocument3 pagesNature and Concept of ManagementHalimanessa AlontoNo ratings yet
- Cjmo 2023Document2 pagesCjmo 2023ferrousweiNo ratings yet
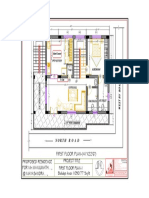
- Proposed Residence For MR - Manjunath..., at Mayasandra... ,: FIRST FLOOR PLAN - (41'X22'6'')Document1 pageProposed Residence For MR - Manjunath..., at Mayasandra... ,: FIRST FLOOR PLAN - (41'X22'6'')arya adeshNo ratings yet
- The Art of SingingDocument40 pagesThe Art of SingingTrish VictoriaNo ratings yet