You might also like
- Serratron 100 IDocument4 pagesSerratron 100 IOvidiu Si Roxana IvascuNo ratings yet
- MAXDNA Overview and Case-Study: Presented byDocument56 pagesMAXDNA Overview and Case-Study: Presented byArun Yadav67% (3)
- Substation Automation SystemDocument44 pagesSubstation Automation SystemKASHIFNo ratings yet
- Beckhoff TwinCATDocument46 pagesBeckhoff TwinCATHamed Mokhtari100% (1)
- En 10025 PDFDocument35 pagesEn 10025 PDFAbdelali88% (8)
- AK 1703 ACP Mã Thiết BịDocument6 pagesAK 1703 ACP Mã Thiết Bịtrưởng võNo ratings yet
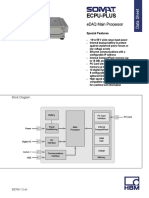
- Ecpu-Plus Main ProcessorDocument8 pagesEcpu-Plus Main ProcessorSK CCNo ratings yet
- USB Type-C Port Controller: General DescriptionDocument36 pagesUSB Type-C Port Controller: General DescriptionJuan C RiveraNo ratings yet
- A EG3200 Section 5 Communication (NXPowerLite)Document37 pagesA EG3200 Section 5 Communication (NXPowerLite)Halit Yalçınkaya100% (1)
- Tcx2-40863-Bac Communicating Cabinet Mounted Universal Controller For BacnetDocument31 pagesTcx2-40863-Bac Communicating Cabinet Mounted Universal Controller For BacnetJM ArcillaNo ratings yet
- Ericsson RNCDocument29 pagesEricsson RNCdileep mishra100% (3)
- RADA Avionics for MALE/HALE UAVsDocument4 pagesRADA Avionics for MALE/HALE UAVsAhmed EsmatNo ratings yet
- Evo Controller 8200/RNC IP configuration guideDocument56 pagesEvo Controller 8200/RNC IP configuration guideluchoben100% (7)
- mcRNC Brief Description and Introduction To Basic Troubleshooting BCN-BDocument50 pagesmcRNC Brief Description and Introduction To Basic Troubleshooting BCN-BAdewale RajiNo ratings yet
- E50001-G720-A143-X-4a00 WS Sicam TM 1703 Acp UsDocument6 pagesE50001-G720-A143-X-4a00 WS Sicam TM 1703 Acp UsdannrangerNo ratings yet
- 1 MaxDNA Overview and Case-StudyDocument55 pages1 MaxDNA Overview and Case-StudyDARA BABU (N120663)No ratings yet
- S7-300 PLC in RTG NEW V1.0Document42 pagesS7-300 PLC in RTG NEW V1.0Dinh SangNo ratings yet
- Alcplus2: Acm Radio LinkDocument126 pagesAlcplus2: Acm Radio Link123 KabulNo ratings yet
- Manual Canbus - Ingles PDFDocument38 pagesManual Canbus - Ingles PDFTom WilberNo ratings yet
- Xtrapulspac™: Ac Servo-DriveDocument4 pagesXtrapulspac™: Ac Servo-DriveAndrii MaalerNo ratings yet
- Pcan-Micromod: User ManualDocument27 pagesPcan-Micromod: User ManualRajibNo ratings yet
- MCRNC Brief HW Description and TroubleshootingDocument24 pagesMCRNC Brief HW Description and TroubleshootingAdewale RajiNo ratings yet
- Evo Controller 8200 IP Configuration KODocument56 pagesEvo Controller 8200 IP Configuration KORogerioNo ratings yet
- Parkerrr6k PDFDocument15 pagesParkerrr6k PDFJuanJValenciaCruzNo ratings yet
- QMotion 1Document2 pagesQMotion 1Henry SierraNo ratings yet
- Evo Controller 8200 IP Configuration KO PDFDocument56 pagesEvo Controller 8200 IP Configuration KO PDFPrakul Asthana100% (1)
- DataSheet ERTEC200P-2 V1 0Document80 pagesDataSheet ERTEC200P-2 V1 0dupirulitoNo ratings yet
- US5Ge Next Generation SSU PRC GPS BasedDocument3 pagesUS5Ge Next Generation SSU PRC GPS BasedcharleskawumaNo ratings yet
- Nais PLC Fp2Document39 pagesNais PLC Fp2Afrisoni SoniNo ratings yet
- Modulo de Bahia BM-9100Document2 pagesModulo de Bahia BM-9100Jose M. VasquezNo ratings yet
- Datasheet Epos 24 5Document3 pagesDatasheet Epos 24 5Halima TamboNo ratings yet
- DCS Training Presentation R.01newDocument54 pagesDCS Training Presentation R.01newAhsan Fareed100% (1)
- 9Ch NMEA (Serial) Ethernet GatewayDocument16 pages9Ch NMEA (Serial) Ethernet GatewayEvgeny YudinNo ratings yet
- p145 Cp2e Datasheet enDocument48 pagesp145 Cp2e Datasheet enCristiano TruccanoNo ratings yet
- 500 MK3 DataDocument4 pages500 MK3 Datawaleed alqatabNo ratings yet
- DAC-4 Data Sheet E R13 20151005Document12 pagesDAC-4 Data Sheet E R13 20151005Ricardo Felipe Cortes MenayNo ratings yet
- ECIL SCADA SystemsDocument25 pagesECIL SCADA Systemsraj1508No ratings yet
- USB Type-C Port Controller: General DescriptionDocument33 pagesUSB Type-C Port Controller: General DescriptionDylan BobNo ratings yet
- DVP PLC Series GuideDocument31 pagesDVP PLC Series GuideFrancisco Javier BurgosNo ratings yet
- ALC 2 Training SlideDocument128 pagesALC 2 Training SlideIslam AdamNo ratings yet
- Genset Controller DATAKOM-D500 MK2 DATA SheetDocument4 pagesGenset Controller DATAKOM-D500 MK2 DATA SheetCalixte GbaguidiNo ratings yet
- PLC's & Its Applications: BY Anil KumarDocument51 pagesPLC's & Its Applications: BY Anil Kumarsrini_kalmulaNo ratings yet
- Marine Control Unit (Mcu)Document1 pageMarine Control Unit (Mcu)Oktay KESKİNKILIÇNo ratings yet
- DAC-1146 (E) Catalog SheetDocument2 pagesDAC-1146 (E) Catalog SheetNguyen Sy LuuNo ratings yet
- Feeder Protection RelayDocument8 pagesFeeder Protection RelayUtkan BALABANNo ratings yet
- Hardware Overview (Chapter 2)Document74 pagesHardware Overview (Chapter 2)shkytenkoNo ratings yet
- Automation in A Steel PlantDocument13 pagesAutomation in A Steel Plantsidraiz260% (1)
- Programmable Logic Controller for Delta Automation SystemsDocument25 pagesProgrammable Logic Controller for Delta Automation SystemsDhanuska BothejuNo ratings yet
- MICRO DISTRIBUTED Catalog Rev GDocument4 pagesMICRO DISTRIBUTED Catalog Rev GMilorad PavlovicNo ratings yet
- Am79C970 PCnet PCI Single-Chip Ethernet Controller DatasheetDocument168 pagesAm79C970 PCnet PCI Single-Chip Ethernet Controller DatasheetrkaippullyNo ratings yet
- Accessories and specifications for Trio MC302X motion controllerDocument30 pagesAccessories and specifications for Trio MC302X motion controllerthehanhctmNo ratings yet
- CS CJ1W NCF71 InverterSuppotTechnicalNote Rev01Document19 pagesCS CJ1W NCF71 InverterSuppotTechnicalNote Rev01diarjohn9979No ratings yet
- DPU4F Module Operator InterfaceDocument17 pagesDPU4F Module Operator InterfaceMendes OffShoreNo ratings yet
- Catalog PLC GuideDocument38 pagesCatalog PLC GuideOsama MohammedNo ratings yet
- IC200CPUE05Document6 pagesIC200CPUE05Dizay AjidNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsFrom EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsNo ratings yet
- Manual EPOS2 ApplicationNotesCollection PDFDocument226 pagesManual EPOS2 ApplicationNotesCollection PDFLucas SuplinoNo ratings yet
- Manual EPOS2 GettingStartedDocument36 pagesManual EPOS2 GettingStartedLucas SuplinoNo ratings yet
- Weareable Robots IndexDocument4 pagesWeareable Robots IndexLucas SuplinoNo ratings yet
- 28b Motion Control For Newbies PDFDocument132 pages28b Motion Control For Newbies PDFMRRogueNo ratings yet
- CAN Manual300 3-0-3 PDFDocument194 pagesCAN Manual300 3-0-3 PDFLucas SuplinoNo ratings yet
- Miniature Absolute Magnetic Shaft Encoder GuideDocument8 pagesMiniature Absolute Magnetic Shaft Encoder GuideLucas SuplinoNo ratings yet
- Manual EPOS2 ApplicationNotesCANopenDocument15 pagesManual EPOS2 ApplicationNotesCANopenLucas SuplinoNo ratings yet
- Encoder MILE 512-6400 CPT Channels RS 422Document1 pageEncoder MILE 512-6400 CPT Channels RS 422Lucas SuplinoNo ratings yet
- 90mm EC Brushless MotorDocument1 page90mm EC Brushless MotorLucas SuplinoNo ratings yet
- Munchkin CardDocument8 pagesMunchkin CardLucas Suplino0% (1)
- Writing Useful SitesDocument3 pagesWriting Useful SitesLucas SuplinoNo ratings yet
- + or Cryptopotato - Com or U.today-Domain Domains-UsDocument128 pages+ or Cryptopotato - Com or U.today-Domain Domains-UsMalkeet SinghNo ratings yet
- Sales Confirmation: Alpha Trading S.P.A. Compagnie Tunisienne de NavigationDocument1 pageSales Confirmation: Alpha Trading S.P.A. Compagnie Tunisienne de NavigationimedNo ratings yet
- 3gpp Cdrs Specs AlcatelDocument337 pages3gpp Cdrs Specs AlcatelPatrick AdinaNo ratings yet
- Keerai BenefitsDocument3 pagesKeerai BenefitsjnaguNo ratings yet
- Sindhi 2020Document1 pageSindhi 2020Engr Javed AkhtarNo ratings yet
- Big Data Machine Learning Using Apache Spark Mllib: December 2017Document8 pagesBig Data Machine Learning Using Apache Spark Mllib: December 2017edgarNo ratings yet
- Tourist Spot in Ilocos Norte PhilippinesDocument1 pageTourist Spot in Ilocos Norte Philippinescharlie besabellaNo ratings yet
- A Study On Customer Satisfaction of TVS Apache RTR 160Document11 pagesA Study On Customer Satisfaction of TVS Apache RTR 160Manajit BhowmikNo ratings yet
- B IngDocument2 pagesB IngsyfnanyNo ratings yet
- Facilitating Learner Centered Teaching FinalsDocument3 pagesFacilitating Learner Centered Teaching FinalsPatricia Andrei De GuzmanNo ratings yet
- MTSC QuestionsDocument8 pagesMTSC QuestionsAbhi RamNo ratings yet
- Delta ABAP Workbench 4.0 To 4.6Document313 pagesDelta ABAP Workbench 4.0 To 4.6aurber2013No ratings yet
- Greetings To EveryoneDocument2 pagesGreetings To EveryoneLouella MedinaNo ratings yet
- People Vs Sindiong & PastorDocument4 pagesPeople Vs Sindiong & PastorErby Jennifer Sotelo-GesellNo ratings yet
- Free PPT Templates: Insert The Title of Your Presentation HereDocument10 pagesFree PPT Templates: Insert The Title of Your Presentation HereMaybelyn Medrano100% (1)
- Hidden Divergence Reveals Profitable Trading PatternsDocument12 pagesHidden Divergence Reveals Profitable Trading PatternsSubrata PaulNo ratings yet
- SL - No Name of The Students University Roll NumberDocument58 pagesSL - No Name of The Students University Roll NumberSai AmbatiNo ratings yet
- Lesson 7Document29 pagesLesson 7Khelly Joshua UyNo ratings yet
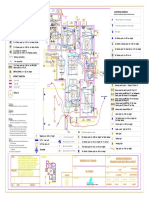
- Varun Valanjeri Electrical Layout-3Document1 pageVarun Valanjeri Electrical Layout-3ANOOP R NAIRNo ratings yet
- IN THE COURT OF - SUIT/APPEAL No. - JURISDICTION OF 2017Document1 pageIN THE COURT OF - SUIT/APPEAL No. - JURISDICTION OF 2017Adv Pooja AroraNo ratings yet
- An Essay For The Glass Menagerie PDFDocument11 pagesAn Essay For The Glass Menagerie PDFBily ManNo ratings yet
- Vistara News and Tie UpDocument4 pagesVistara News and Tie UpDimple RathodNo ratings yet
- Underwater Cutting and Welding Equipment - 89250054 - AbDocument38 pagesUnderwater Cutting and Welding Equipment - 89250054 - AbAhmed Adel100% (1)
- Pricelist PT SCB Maret 2023Document11 pagesPricelist PT SCB Maret 2023PT RUKUN CAHAYA ABADINo ratings yet
- Cing - Common Interface For NMR Structure Generation: Results 1 - 10 of 978Document3 pagesCing - Common Interface For NMR Structure Generation: Results 1 - 10 of 978Judap FlocNo ratings yet
- Sec. Gr. To BT History Temp Panel 2013Document50 pagesSec. Gr. To BT History Temp Panel 2013edwin_prakash75No ratings yet
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDocument5 pagesBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDeep PandyaNo ratings yet
- DR Horton Homeowners ManualDocument80 pagesDR Horton Homeowners ManualLynn RaisesNo ratings yet
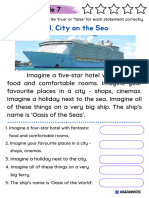
- Reading Module 7Document10 pagesReading Module 7lawrencekailNo ratings yet