You might also like
- Soundir 1 PJDocument2 pagesSoundir 1 PJHeri BudiantoNo ratings yet
- Experimental & 1D FEA Temp ComparisonDocument4 pagesExperimental & 1D FEA Temp ComparisonGaurav GayakeNo ratings yet
- Resistance CalculationsDocument2 pagesResistance CalculationsqweqweqweNo ratings yet
- Field Investigation Data Sheet Ducth Cone Penetrometer Test/Sondir TestDocument1 pageField Investigation Data Sheet Ducth Cone Penetrometer Test/Sondir Testfebri yoga AnggaraNo ratings yet
- Foundation Design Swadaya LorohouseDocument1 pageFoundation Design Swadaya LorohouseDify Rizky KNo ratings yet
- Sondir PerpustakaanDocument51 pagesSondir PerpustakaanSyara HanjayaNo ratings yet
- Dias (NOV - DIC) P (MM) Orden Pa X P (MM) Tiempo de Retorno: Pluviometro - Nueva EsperanzaDocument8 pagesDias (NOV - DIC) P (MM) Orden Pa X P (MM) Tiempo de Retorno: Pluviometro - Nueva EsperanzaIan Alejos CastilloNo ratings yet
- Steel CalculationsDocument1 pageSteel CalculationsmuhammadnadeemanjumNo ratings yet
- AssignmentDocument23 pagesAssignmentGlenPalmerNo ratings yet
- GI Pipe Weight ChartDocument4 pagesGI Pipe Weight ChartFlormin LumbaoNo ratings yet
- Kitten Length (CM) Weight (G) : SolutionDocument4 pagesKitten Length (CM) Weight (G) : SolutionCyndi CascaroNo ratings yet
- Resistance Calculations.: Delft Series ('98)Document3 pagesResistance Calculations.: Delft Series ('98)Alex CioaraNo ratings yet
- Capacity RefDocument1 pageCapacity Refرب اغفر لقومي فإنهم لا يعلمونNo ratings yet
- Data PlaxisDocument4 pagesData PlaxisTahta AthallahNo ratings yet
- Tab 12.1 Unconfined Strength Test ResultsDocument4 pagesTab 12.1 Unconfined Strength Test ResultsOktavia PutriNo ratings yet
- BANGUNAN AIr M Sevi Abdillah - 2010611043Document4 pagesBANGUNAN AIr M Sevi Abdillah - 2010611043seviabdillah4No ratings yet
- Gamma GammaDocument3 pagesGamma GammaDebayan BiswasNo ratings yet
- Form LaporanDocument36 pagesForm LaporantriNo ratings yet
- S.1Document3 pagesS.1samsulNo ratings yet
- Title: Particle Size Analysis Via Mechanical Sieve: CEE 346L - Geotechnical Engineering I LabDocument6 pagesTitle: Particle Size Analysis Via Mechanical Sieve: CEE 346L - Geotechnical Engineering I LabAbhishek RayNo ratings yet
- Y6 Dividing With DecimalsDocument1 pageY6 Dividing With DecimalsAqilah Noor BahariNo ratings yet
- Field Data Investigation Ducth Cone Penetrometer TestDocument3 pagesField Data Investigation Ducth Cone Penetrometer TestRahmad SamudraNo ratings yet
- Cuadro de DatosDocument2 pagesCuadro de DatosJhony C CarrascoNo ratings yet
- Cuttings Exported 2020 2022Document189 pagesCuttings Exported 2020 2022Getrude GeraldNo ratings yet
- Rainfall Data SheetDocument2 pagesRainfall Data Sheetᜁᜊ ᜀᜎᜆᜂNo ratings yet
- No. Tegangan (Volt) Arus (Ma)Document3 pagesNo. Tegangan (Volt) Arus (Ma)Rolando ManurungNo ratings yet
- Statistical Analysis Software Gross Profit FactorsDocument2 pagesStatistical Analysis Software Gross Profit FactorsMhervin BisisNo ratings yet
- Flow rate and reactor volume analysisDocument4 pagesFlow rate and reactor volume analysisAnubius LokatNo ratings yet
- k7Document278 pagesk7ZatAdiktifNo ratings yet
- Field Investigation Data Sheet Ducth Cone Penetrometer Test/Sondir TestDocument2 pagesField Investigation Data Sheet Ducth Cone Penetrometer Test/Sondir TestAdefi AbiogaNo ratings yet
- Injection Table (CITY)Document1 pageInjection Table (CITY)Hasilwan ChanNo ratings yet
- 3 Dados Motores Assíncronos Trifásicos Com Rotor em Curto-Circuito Tab 6.4Document4 pages3 Dados Motores Assíncronos Trifásicos Com Rotor em Curto-Circuito Tab 6.4andreNo ratings yet
- Jl. Pendidikan, 27 Malaingkedi, Kota Sorong, Telp (0951) 328775 Faks (0951) 326162Document13 pagesJl. Pendidikan, 27 Malaingkedi, Kota Sorong, Telp (0951) 328775 Faks (0951) 326162era watiNo ratings yet
- Data Penyelidikan Lapangan Pengujian Ducth Cone Penetrometer Test/Sondir Rumah TinggalDocument2 pagesData Penyelidikan Lapangan Pengujian Ducth Cone Penetrometer Test/Sondir Rumah TinggalAgus CnsNo ratings yet
- Theis CurveDocument8 pagesTheis CurveumairNo ratings yet
- CB Disc Spring CatalogueDocument28 pagesCB Disc Spring Cataloguekjagu87No ratings yet
- Diagrama Creciente) : Elavoracion de Hidrograma UnitarioDocument5 pagesDiagrama Creciente) : Elavoracion de Hidrograma Unitariodavid porrasNo ratings yet
- Motorola Six Sigma Conversion TableDocument1 pageMotorola Six Sigma Conversion TableMars HNo ratings yet
- CAlcio Fino y Grueso Polo MatiasDocument2 pagesCAlcio Fino y Grueso Polo MatiasCarlos M. LópezNo ratings yet
- Tabla Awg by Kriss Electronics PDFDocument1 pageTabla Awg by Kriss Electronics PDFflavio5palomino5alarNo ratings yet
- Observation Table for Rate of Reaction of HCl with NaOHDocument4 pagesObservation Table for Rate of Reaction of HCl with NaOHrishavNo ratings yet
- Axial de Rodillos y de BolaDocument6 pagesAxial de Rodillos y de BolaGustavo RodriguezNo ratings yet
- ManoloDocument6 pagesManoloManuel Mamani De La TorreNo ratings yet
- Report Homework 1 No 8 & 11Document5 pagesReport Homework 1 No 8 & 11mrr dwi lindawatiNo ratings yet
- PLATE BEARING TEST (Acc. DIN 18134) - Part - 1 (Field Data)Document2 pagesPLATE BEARING TEST (Acc. DIN 18134) - Part - 1 (Field Data)EMANUELINo ratings yet
- Simulating reservoir outflow and water level changes over timeDocument6 pagesSimulating reservoir outflow and water level changes over timeJoaquim Ferreira Costa FilhoNo ratings yet
- 000 Abc 3Document51 pages000 Abc 3nelson jose romero montielNo ratings yet
- Pasir Panjang Bus DepotDocument4 pagesPasir Panjang Bus DepotVaidees waranNo ratings yet
- Hujan dan infiltasi tanahDocument3 pagesHujan dan infiltasi tanahDINI ISLAMI RAHMAWATINo ratings yet
- D Cumilé D D'action S Deblai S Remblai V DeblaiDocument10 pagesD Cumilé D D'action S Deblai S Remblai V DeblaiaaerNo ratings yet
- Perhitungan Mektan Kelompok 1Document39 pagesPerhitungan Mektan Kelompok 1Jasinta Lizarni PutriNo ratings yet
- PeyokDocument60 pagesPeyokJajang D SetyawanNo ratings yet
- No N/10s N/10s Frekuensi (N/10 S) (F) Pobs P (M) : Grafik Watak Statistik Radiasi NuklirDocument5 pagesNo N/10s N/10s Frekuensi (N/10 S) (F) Pobs P (M) : Grafik Watak Statistik Radiasi NuklirMaria DANo ratings yet
- Plaxis - Finite Element Code For Soil and Rock AnalysesDocument1 pagePlaxis - Finite Element Code For Soil and Rock AnalysesYulius HendraNo ratings yet
- Utilities Size Distribution PinaDocument3 pagesUtilities Size Distribution PinaDefsson DouglasNo ratings yet
- slipping-wind-peralte-justificationDocument8 pagesslipping-wind-peralte-justificationRobinson Aponte SierraNo ratings yet
- 1 DCP1Document2 pages1 DCP1Edson Da GracaNo ratings yet
- Tabla para GasDocument6 pagesTabla para Gasrodrigo osinaga solizNo ratings yet
- Government Publications: Key PapersFrom EverandGovernment Publications: Key PapersBernard M. FryNo ratings yet
- Math Practice Simplified: Decimals & Percents (Book H): Practicing the Concepts of Decimals and PercentagesFrom EverandMath Practice Simplified: Decimals & Percents (Book H): Practicing the Concepts of Decimals and PercentagesRating: 5 out of 5 stars5/5 (3)
- Elvis PDFDocument74 pagesElvis PDFJairo Lugo100% (1)
- Signal GeneratorDocument16 pagesSignal GeneratorRahman Ecky RNo ratings yet
- 24 121904Document15 pages24 121904Rahman Ecky RNo ratings yet
- Join the fight vs ScientologyDocument2 pagesJoin the fight vs ScientologyRahman Ecky RNo ratings yet
- Signal Processing Experiments in MatlabDocument3 pagesSignal Processing Experiments in MatlabRahman Ecky RNo ratings yet
- Computer SecurityDocument8 pagesComputer SecurityRahman Ecky RNo ratings yet
- Lamiran Unit Price 2017Document14 pagesLamiran Unit Price 2017Rahman Ecky RNo ratings yet
- Load RegulationDocument5 pagesLoad RegulationchanchaalNo ratings yet
- Tugas Elektronika 1 PDFDocument1 pageTugas Elektronika 1 PDFRahman Ecky RNo ratings yet
- A Loosely Coupled Planar Wireless Power System For Multiple ReceiversDocument9 pagesA Loosely Coupled Planar Wireless Power System For Multiple ReceiversRahman Ecky RNo ratings yet
- Tugas Elektronika 1 PDFDocument1 pageTugas Elektronika 1 PDFRahman Ecky RNo ratings yet
- Tugas Elektronika 1 PDFDocument1 pageTugas Elektronika 1 PDFRahman Ecky RNo ratings yet
- NSS12201L DDocument5 pagesNSS12201L DjamesabowdenNo ratings yet
- Antidote IEEE 11073-20601 Library Developers GuideDocument23 pagesAntidote IEEE 11073-20601 Library Developers Guidekeyz182No ratings yet
- Designing and Developing a Cloud-Based Container Management System for Maersk LineDocument38 pagesDesigning and Developing a Cloud-Based Container Management System for Maersk LineAlexNo ratings yet
- 26 09 23 Lighting Control DevicesDocument2 pages26 09 23 Lighting Control DeviceskaichosanNo ratings yet
- ListnamaDocument17 pagesListnamaMuhammad RiyadiNo ratings yet
- EU-ME2_EU-ME_PremierPlus_QRG_Setup-1Document4 pagesEU-ME2_EU-ME_PremierPlus_QRG_Setup-1lied cnNo ratings yet
- Checkpoint Firewall Interview QuestionsDocument5 pagesCheckpoint Firewall Interview QuestionsHemant Sharma100% (2)
- Vijay Dhanakodi-Mulesoft DeveloperDocument3 pagesVijay Dhanakodi-Mulesoft DeveloperTamilarasi DhanakodiNo ratings yet
- 4 - Chapter 3 Key ConceptsDocument6 pages4 - Chapter 3 Key ConceptsCloudKitNo ratings yet
- Software Quality Assurance AnalystDocument3 pagesSoftware Quality Assurance Analystapi-121649886No ratings yet
- Finite State MachineDocument57 pagesFinite State MachinedoomachaleyNo ratings yet
- Configure Nagios to Monitor Windows MachinesDocument2 pagesConfigure Nagios to Monitor Windows MachinesAhmed ShamsanNo ratings yet
- Solaris Cluster Reservation Conflict Panic in A Clustered Guest LDom When Rebooting Primary Service DomainDocument4 pagesSolaris Cluster Reservation Conflict Panic in A Clustered Guest LDom When Rebooting Primary Service DomaincresmakNo ratings yet
- P2131 - A00 GK208 GDDR5 256X32Bit: DescriptionDocument16 pagesP2131 - A00 GK208 GDDR5 256X32Bit: DescriptionCarlosBayonaMontenegroNo ratings yet
- A Arduino-Info - RobotKitAboutDocument63 pagesA Arduino-Info - RobotKitAboutzakariiNo ratings yet
- DP3F Closed Loop Stepping Driver ManualDocument28 pagesDP3F Closed Loop Stepping Driver ManualNguyen QuanNo ratings yet
- LINUX PROCESS MANAGEMENT AND IPCDocument18 pagesLINUX PROCESS MANAGEMENT AND IPCgangana nikhithreddyNo ratings yet
- Cambridge Lower Secondary Computing Exec Preview Mini UK (No Request)Document28 pagesCambridge Lower Secondary Computing Exec Preview Mini UK (No Request)jawadkhuzaimaNo ratings yet
- TEX700LCD-1000light 0310Document4 pagesTEX700LCD-1000light 0310evert22No ratings yet
- DSI - MPS® Transfer System Compact Trainer I4.0 - EN - DID1089 (Screen)Document2 pagesDSI - MPS® Transfer System Compact Trainer I4.0 - EN - DID1089 (Screen)mhafizanNo ratings yet
- Hi-Fog Electric Pump UnitDocument2 pagesHi-Fog Electric Pump UnitAdvenser GroupNo ratings yet
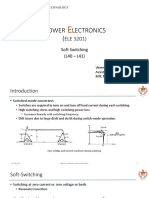
- Ower Lectronics (: Soft Switching (L40 - L41)Document7 pagesOwer Lectronics (: Soft Switching (L40 - L41)Mayank KashyapNo ratings yet
- XNP-6320RH/6250RH: 2MP 32x/25x Network IR PTZ CameraDocument3 pagesXNP-6320RH/6250RH: 2MP 32x/25x Network IR PTZ Camerasexkoal90No ratings yet
- LAB Manual Tech Support DSL BroadbandDocument41 pagesLAB Manual Tech Support DSL BroadbandWaleed AhmadNo ratings yet
- 0542 (MDM) HubJavaUserExits en H2LDocument18 pages0542 (MDM) HubJavaUserExits en H2LarjuncchaudharyNo ratings yet
- Mbs Public School: Physics ProjectDocument12 pagesMbs Public School: Physics ProjectSwaraj PatelNo ratings yet
- IPCLK1000 User Guide PDFDocument119 pagesIPCLK1000 User Guide PDFGirasolesAmarillosNo ratings yet
- PMI-Servo Stabilizer Product CatalogueDocument5 pagesPMI-Servo Stabilizer Product CatalogueWilmer SusanoNo ratings yet
- SSL3250A: 1. General DescriptionDocument26 pagesSSL3250A: 1. General DescriptionHarish Kumar MNo ratings yet
- P.P.10.1 Node Analysis of Phasor CircuitsDocument10 pagesP.P.10.1 Node Analysis of Phasor CircuitsNguyễn Bá HoàngNo ratings yet