You might also like
- Akhtamov A.A. - Destination C1-C2, Test CollectionDocument37 pagesAkhtamov A.A. - Destination C1-C2, Test CollectionNguyen NhiNo ratings yet
- Captiva 2013 Systema Electric 3.0Document13 pagesCaptiva 2013 Systema Electric 3.0carlos martinez50% (2)
- Goedel's Theorem /godel's TheoremDocument6 pagesGoedel's Theorem /godel's TheoremAHLUSSUNNAHVSALIMIRZANo ratings yet
- Teach Theory and Diagnosis of Multiple CAN Systems Using DLCDocument16 pagesTeach Theory and Diagnosis of Multiple CAN Systems Using DLCJaffer HussainNo ratings yet
- Election of Councillors for Dudden Hill Borough WardDocument1 pageElection of Councillors for Dudden Hill Borough WardLink ZeldaNo ratings yet
- RADEMAKER) Sophrosyne and The Rhetoric of Self-RestraintDocument392 pagesRADEMAKER) Sophrosyne and The Rhetoric of Self-RestraintLafayers100% (2)
- Maths - IJAMSS - Common Fixed Point Theorem V.K. GuptaDocument8 pagesMaths - IJAMSS - Common Fixed Point Theorem V.K. Guptaiaset123No ratings yet
- (29-35) A Unique Common Fixed Point Theorem Under Psi Varphi Contractive Condition in Partial Metric Spaces Using Rational ExpressionsDocument8 pages(29-35) A Unique Common Fixed Point Theorem Under Psi Varphi Contractive Condition in Partial Metric Spaces Using Rational ExpressionsAlexander DeckerNo ratings yet
- Fixed Point Result in Menger Space With EA PropertyDocument6 pagesFixed Point Result in Menger Space With EA PropertyAlexander DeckerNo ratings yet
- 15 - Published PapersDocument11 pages15 - Published PapersMehwish QadirNo ratings yet
- Fixed Point Theory and Applications: Fixed Point Theorems For Weakly C-Contractive Mappings in Partial Metric SpacesDocument18 pagesFixed Point Theory and Applications: Fixed Point Theorems For Weakly C-Contractive Mappings in Partial Metric SpacesAnca Maria AncaNo ratings yet
- fixed_point_results_for_multivalued_mappings_in_mathbf_g_bcone_metric_spacesDocument10 pagesfixed_point_results_for_multivalued_mappings_in_mathbf_g_bcone_metric_spacesjhudddar99No ratings yet
- Mathematical and Computer Modelling: Binayak S. Choudhury, Pranati MaityDocument7 pagesMathematical and Computer Modelling: Binayak S. Choudhury, Pranati MaityTalha WaheedNo ratings yet
- Homework problems on polynomials and ideals due 1/20/10Document94 pagesHomework problems on polynomials and ideals due 1/20/10kamilbismaNo ratings yet
- Statistical Convergence in G-Metric Spaces: Rasoul AbazariDocument9 pagesStatistical Convergence in G-Metric Spaces: Rasoul AbazariHenry KingNo ratings yet
- Orthogonal P-Wavelets On R: + Yu.A. FarkovDocument23 pagesOrthogonal P-Wavelets On R: + Yu.A. FarkovukoszapavlinjeNo ratings yet
- New Results On Occasionally Weakly Compatible Mappingsand Fixed Point Theorem in Fuzzy Metric Spaces Satisfying Integral Type InequalityDocument8 pagesNew Results On Occasionally Weakly Compatible Mappingsand Fixed Point Theorem in Fuzzy Metric Spaces Satisfying Integral Type InequalityinventyNo ratings yet
- Fixed Point Theorems For Eight Mappings On Menger Space Through CompatibilityDocument5 pagesFixed Point Theorems For Eight Mappings On Menger Space Through CompatibilityresearchinventyNo ratings yet
- Common Fixed Point Results For R - Weakly CommutinDocument14 pagesCommon Fixed Point Results For R - Weakly CommutinTalha WaheedNo ratings yet
- Metric SpacesDocument21 pagesMetric SpacesaaronbjarkeNo ratings yet
- LEC0125 RNG GenerationDocument7 pagesLEC0125 RNG GenerationJuani TonelliNo ratings yet
- 2Document9 pages2Luis Alberto FuentesNo ratings yet
- Generalized Compatibility in Partially Ordered Metric SpacesDocument16 pagesGeneralized Compatibility in Partially Ordered Metric SpacesLuis Alberto FuentesNo ratings yet
- L Spaces: 3.1 Banach and Hilbert SpacesDocument10 pagesL Spaces: 3.1 Banach and Hilbert SpacesGiovanny Der KaiserNo ratings yet
- Lecture No.6Document8 pagesLecture No.6MUHAMMAD USMANNo ratings yet
- Semi Weakly Compatibility of Maps in Fuzzy Metric Space: Faculty, National Institute of Technology, Warangal, IndiaDocument6 pagesSemi Weakly Compatibility of Maps in Fuzzy Metric Space: Faculty, National Institute of Technology, Warangal, IndiaTJPRC PublicationsNo ratings yet
- Suganthi Ifscom PDFDocument11 pagesSuganthi Ifscom PDFVimala SuganthiNo ratings yet
- A Common Fixed Point Theorems in 2-Metric Spaces Satisfying Integral Type Implicit RelationDocument12 pagesA Common Fixed Point Theorems in 2-Metric Spaces Satisfying Integral Type Implicit Relationadmin2146No ratings yet
- On Lp-Sasakian ManifoldsDocument8 pagesOn Lp-Sasakian ManifoldsSunil YadavNo ratings yet
- Lecture No.6Document8 pagesLecture No.6Awais RaoNo ratings yet
- Canonical Quantization C6, HT 2016: 1.1 From Classical To Quantum TheoryDocument19 pagesCanonical Quantization C6, HT 2016: 1.1 From Classical To Quantum Theorycifarha venantNo ratings yet
- An Empirical Bayes ApproachDocument7 pagesAn Empirical Bayes Approachcamus CaNo ratings yet
- Metric Spaces Examples of Metric SpacesDocument5 pagesMetric Spaces Examples of Metric SpacesAjoy SharmaNo ratings yet
- Mathematics for Statistics: Set TheoryDocument11 pagesMathematics for Statistics: Set TheoryStephen Jun VillejoNo ratings yet
- SAA For JCCDocument18 pagesSAA For JCCShu-Bo YangNo ratings yet
- IEOR 6711: Laws of Large NumbersDocument6 pagesIEOR 6711: Laws of Large NumbersSongya PanNo ratings yet
- Informationtheory-Lecture Slides-A1 Solutions 5037558613Document0 pagesInformationtheory-Lecture Slides-A1 Solutions 5037558613gowthamkurriNo ratings yet
- Common fixed point theorems for PD-operator pairs under relaxed conditions with applicationsDocument11 pagesCommon fixed point theorems for PD-operator pairs under relaxed conditions with applicationsMustafa Al-AniNo ratings yet
- Ɣ-Regularity and Ɣ-Normality Via Extended Notions of Ɣ-Open Sets Due To CsaszarDocument8 pagesƔ-Regularity and Ɣ-Normality Via Extended Notions of Ɣ-Open Sets Due To CsaszarYhonnatan SalazarNo ratings yet
- Some Fixed Point Theorems in Metric and 2-Metric Spaces: S. Venkata Ratnam NaiduDocument12 pagesSome Fixed Point Theorems in Metric and 2-Metric Spaces: S. Venkata Ratnam NaiduTomi DimovskiNo ratings yet
- Probability For Ai2Document8 pagesProbability For Ai2alphamale173No ratings yet
- 10 - Posets Basic Concepts: William T. TrotterDocument22 pages10 - Posets Basic Concepts: William T. TrotterMary GeorgeNo ratings yet
- A path decomposition expansion proof for the method of imagesDocument4 pagesA path decomposition expansion proof for the method of imagesAlejandro MoranoNo ratings yet
- Study of Common Fixed Point Result of Pair of Self Maps in G-Metric SpaceDocument5 pagesStudy of Common Fixed Point Result of Pair of Self Maps in G-Metric SpaceIJAR JOURNALNo ratings yet
- Geometry BasicsDocument6 pagesGeometry BasicsMatthew RaymondNo ratings yet
- CS19M016 PGM Assignment1Document9 pagesCS19M016 PGM Assignment1avinashNo ratings yet
- Elliptic Ding-Iohara-Miki Algebra and Commutative Families of The Elliptic Ruijsenaars OperatorsDocument21 pagesElliptic Ding-Iohara-Miki Algebra and Commutative Families of The Elliptic Ruijsenaars Operatorsapi-225890336No ratings yet
- Some New Fixed Point Theorems For Generalized Weak Contraction in Partially Ordered Metric SpacesDocument9 pagesSome New Fixed Point Theorems For Generalized Weak Contraction in Partially Ordered Metric SpacesNaveen GulatiNo ratings yet
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocument10 pagesA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNo ratings yet
- Amar Ouaoua-2019Document10 pagesAmar Ouaoua-2019Chương Quách VănNo ratings yet
- Ajms 480 23Document7 pagesAjms 480 23BRNSS Publication Hub InfoNo ratings yet
- On The Connection Between Neural Processes and Gaussian Processes With Deep KernelsDocument6 pagesOn The Connection Between Neural Processes and Gaussian Processes With Deep KernelsNina MouhoubNo ratings yet
- Stochastic Processes NotesDocument22 pagesStochastic Processes Notesels_872100% (1)
- Some Fixed Point Theorems For Expansion Mappings: A.S.Saluja, Alkesh Kumar Dhakde Devkrishna MagardeDocument7 pagesSome Fixed Point Theorems For Expansion Mappings: A.S.Saluja, Alkesh Kumar Dhakde Devkrishna MagardeInternational Journal of computational Engineering research (IJCER)No ratings yet
- ECS 315 Probability and Random Processes Homework SolutionsDocument64 pagesECS 315 Probability and Random Processes Homework SolutionsWilliam Chandra PratamaNo ratings yet
- Fixed Points For Multivalued Contractions in B-Metric Spaces With Applications To FractalsDocument12 pagesFixed Points For Multivalued Contractions in B-Metric Spaces With Applications To FractalsBrenton MorrisonNo ratings yet
- First-order Predicate Logic Tutorial for Lecture #6 (FOL IDocument5 pagesFirst-order Predicate Logic Tutorial for Lecture #6 (FOL Itheresa.painterNo ratings yet
- CH 5 HandoutDocument55 pagesCH 5 HandoutgabyssinieNo ratings yet
- Zhang ManifoldDocument16 pagesZhang ManifoldVasi UtaNo ratings yet
- Handout For The Quantitative Finance Course: Conditional Expectation and Discrete MartingaleDocument4 pagesHandout For The Quantitative Finance Course: Conditional Expectation and Discrete Martingaleferkel28No ratings yet
- Ajmaa: Vol. 18 (2021), No. 1, Art. 14, 10 PPDocument10 pagesAjmaa: Vol. 18 (2021), No. 1, Art. 14, 10 PPAnantachai PadcharoenNo ratings yet
- Alg Comb Lecture 7Document8 pagesAlg Comb Lecture 7Mauro Luiz Brandao JuniorNo ratings yet
- Coordinate Representation and Momentum OperatorDocument26 pagesCoordinate Representation and Momentum OperatorATP_101No ratings yet
- 3 Bayesian Deep LearningDocument33 pages3 Bayesian Deep LearningNishanth ManikandanNo ratings yet
- Analysis of A Protocol For The Treatment of Buttocks FolliculitisDocument5 pagesAnalysis of A Protocol For The Treatment of Buttocks FolliculitisLink ZeldaNo ratings yet
- Qualifiers 19Document60 pagesQualifiers 19Link ZeldaNo ratings yet
- Buttocks Lift For Tight ThighsDocument17 pagesButtocks Lift For Tight ThighsLink ZeldaNo ratings yet
- Department of Veterans Affairs: Beth A - Todd, PHD and John G - Thacker, PHDDocument9 pagesDepartment of Veterans Affairs: Beth A - Todd, PHD and John G - Thacker, PHDLink ZeldaNo ratings yet
- 8 Staff - 201508270829016160Document1 page8 Staff - 201508270829016160Link ZeldaNo ratings yet
- M Bataan Dorji Pi To PaperDocument3 pagesM Bataan Dorji Pi To PaperLink ZeldaNo ratings yet
- Commerzbank Aktiengesellschaft Final Terms: Dated 4 July 2016 Relating ToDocument52 pagesCommerzbank Aktiengesellschaft Final Terms: Dated 4 July 2016 Relating ToLink ZeldaNo ratings yet
- Priest House John Godwin KingDocument1 pagePriest House John Godwin KingLink ZeldaNo ratings yet
- 2017 Godwin PHD CH 1Document28 pages2017 Godwin PHD CH 1Link ZeldaNo ratings yet
- LA GRANGE ZZ Top Guitar TabDocument11 pagesLA GRANGE ZZ Top Guitar TabJosé A. Medina100% (1)
- John Godwin CV 2017Document8 pagesJohn Godwin CV 2017Link ZeldaNo ratings yet
- Drone Americane ExempleDocument22 pagesDrone Americane ExempleRatiu IonutNo ratings yet
- BV RhizaDocument27 pagesBV RhizaLink ZeldaNo ratings yet
- Yoc en Geschäftsbericht 2018Document104 pagesYoc en Geschäftsbericht 2018Link ZeldaNo ratings yet
- Context-Free Grammars: A Grammar Is A Set of Rules For Putting Strings Together and So Corresponds To A LanguageDocument20 pagesContext-Free Grammars: A Grammar Is A Set of Rules For Putting Strings Together and So Corresponds To A LanguageLink ZeldaNo ratings yet
- l3 CFG PDFDocument26 pagesl3 CFG PDFȘtefan AnghelNo ratings yet
- Valley of Juigalpa Mayales River Subbasin Microregion Chontales Nicaragua Date List IDocument10 pagesValley of Juigalpa Mayales River Subbasin Microregion Chontales Nicaragua Date List ILink ZeldaNo ratings yet
- Context Free GrammarsDocument38 pagesContext Free GrammarsImran BajwaNo ratings yet
- 2018 Geurds, Prehistory Southern Central AmericaDocument20 pages2018 Geurds, Prehistory Southern Central AmericaLink ZeldaNo ratings yet
- Young Children S Transfer of Series Completion in A Dynamic Testsetting Does Cognitive Flexibility Play A Role 2469 9837 1000199Document10 pagesYoung Children S Transfer of Series Completion in A Dynamic Testsetting Does Cognitive Flexibility Play A Role 2469 9837 1000199Link ZeldaNo ratings yet
- 56646960Document32 pages56646960Link ZeldaNo ratings yet
- Stad2019 Article TheRoleOfCognitiveFlexibilityIDocument24 pagesStad2019 Article TheRoleOfCognitiveFlexibilityILink ZeldaNo ratings yet
- Process Assessment in Dynamic Testing Using Electronic TangiblesDocument16 pagesProcess Assessment in Dynamic Testing Using Electronic TangiblesLink ZeldaNo ratings yet
- Vogelaar&Resing 2018Document18 pagesVogelaar&Resing 2018Link ZeldaNo ratings yet
- Cui Heuven ICPhS2011Document4 pagesCui Heuven ICPhS2011Link ZeldaNo ratings yet
- Jajczyk Jaros Aw CAN 12 2014 PDFDocument10 pagesJajczyk Jaros Aw CAN 12 2014 PDFAzizi AbdullahNo ratings yet
- Official Contest RulesDocument3 pagesOfficial Contest RulesLink ZeldaNo ratings yet
- Scope of CoverageDocument4 pagesScope of CoverageLink ZeldaNo ratings yet
- Enlightened DespotismDocument19 pagesEnlightened Despotismmeghna mNo ratings yet
- Accident Avoiding Bumper SystemDocument3 pagesAccident Avoiding Bumper SystemDeepak DaineNo ratings yet
- Four Process StrategyDocument10 pagesFour Process StrategyChandria FordNo ratings yet
- 4.2 Force and Motion 1Document19 pages4.2 Force and Motion 1ammarsyahmiNo ratings yet
- Get Lucky LetraDocument1 pageGet Lucky LetraDante Jhonatan Kamt GarciaNo ratings yet
- RD 5000 CalibracionDocument5 pagesRD 5000 Calibracionfran reyNo ratings yet
- EPI Manual Part1 2013 2Document350 pagesEPI Manual Part1 2013 2digger1833No ratings yet
- Vastu House PlanDocument187 pagesVastu House Planshilpa shahNo ratings yet
- Surveying - Mcqs On Unit I - SJMDocument6 pagesSurveying - Mcqs On Unit I - SJMKalyani ingole100% (1)
- Ac and DC MeasurementsDocument29 pagesAc and DC MeasurementsRudra ChauhanNo ratings yet
- GE Café™ "This Is Really Big" RebateDocument2 pagesGE Café™ "This Is Really Big" RebateKitchens of ColoradoNo ratings yet
- Sleep Hygiene Sleep QualityandDocument8 pagesSleep Hygiene Sleep QualityandVriddhi AgrawalNo ratings yet
- Nanowires - Fundamental ResearchDocument564 pagesNanowires - Fundamental ResearchJosé Ramírez100% (1)
- Explorer 7100 ACU ManualDocument78 pagesExplorer 7100 ACU ManualMuhammad Shahroz AfzalNo ratings yet
- Foundation Fieldbus: Dataguard™ - Iec61158-2 - Isa/Sp50 - Type A - Extended TemperatureDocument1 pageFoundation Fieldbus: Dataguard™ - Iec61158-2 - Isa/Sp50 - Type A - Extended TemperatureJosé CallisayaNo ratings yet
- 5S ManualDocument60 pages5S ManualMun Hein ZawNo ratings yet
- Technical Report Writing For Ca2 ExaminationDocument6 pagesTechnical Report Writing For Ca2 ExaminationAishee DuttaNo ratings yet
- Hydro Distillation Method Extraction of Eucalyptus Oil Lemongrass OilDocument9 pagesHydro Distillation Method Extraction of Eucalyptus Oil Lemongrass OilSIVANESAN JOTHIVELNo ratings yet
- Madd Powerpoint 1Document17 pagesMadd Powerpoint 1api-457366947No ratings yet
- BOYSEN® Marmorino™ Italian Marble Finish: Liters UseDocument1 pageBOYSEN® Marmorino™ Italian Marble Finish: Liters UseJohn Ray Esmama CalasicasNo ratings yet
- Jhamuna Tower Design DataDocument15 pagesJhamuna Tower Design DataArindam RoyNo ratings yet
- BrochureDocument2 pagesBrochureNarayanaNo ratings yet
- E - Program Files (x86) - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Operation - ENDocument180 pagesE - Program Files (x86) - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Operation - ENJuan Cristóbal Rivera PuellesNo ratings yet
- Mercury MasterDocument18 pagesMercury MastersatishmuggulaNo ratings yet
- GE 5 Purposive Communication Course OverviewDocument10 pagesGE 5 Purposive Communication Course OverviewHarold LuceroNo ratings yet
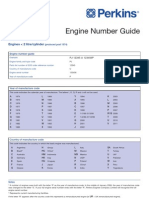
- Perkins Engine Number Guide PP827Document6 pagesPerkins Engine Number Guide PP827Muthu Manikandan100% (1)
- ouchureIC 7000Document4 pagesouchureIC 7000iti_na8567No ratings yet