You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Astm B248 PDFDocument12 pagesAstm B248 PDFFabian Medrano50% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Manual FP90 Thermosystem 82 - 98Document17 pagesManual FP90 Thermosystem 82 - 98alfonso pachon100% (1)
- Project: D.F.Doddamani Date: Designed By: CHKD byDocument4 pagesProject: D.F.Doddamani Date: Designed By: CHKD bynaveenpnaidu1No ratings yet
- Slab Design Using Co-Efficients As Per Is 456-2000Document2 pagesSlab Design Using Co-Efficients As Per Is 456-2000naveenpnaidu1No ratings yet
- Slab Design Using Co-Efficients As Per Is 456-2000Document2 pagesSlab Design Using Co-Efficients As Per Is 456-2000naveenpnaidu1No ratings yet
- Eccentricity Footing - 01022020Document7 pagesEccentricity Footing - 01022020naveenpnaidu1No ratings yet
- Final Column RFT Column RFT - V6 - 06122018Document3 pagesFinal Column RFT Column RFT - V6 - 06122018naveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument6 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- fOOTING rEACTIONS - 21122018Document2 pagesfOOTING rEACTIONS - 21122018naveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument2 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- Project: Datta Ellur Residence Date: Designed By: CHKD byDocument10 pagesProject: Datta Ellur Residence Date: Designed By: CHKD bynaveenpnaidu1No ratings yet
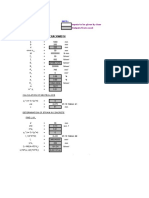
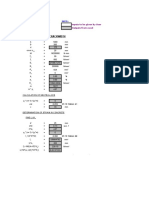
- Calculation of Crackwidth: Inputs To Be Given by User Outputs From ExcelDocument2 pagesCalculation of Crackwidth: Inputs To Be Given by User Outputs From Excelnaveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument6 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument2 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- Slab Design Using Co-Efficients As Per Is 456-2000Document2 pagesSlab Design Using Co-Efficients As Per Is 456-2000naveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument2 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- TABLE: Concrete Column Summary - IS 456-2000 Story Label Unique Name Design Section Station Design/Check Status PMM RatioDocument3 pagesTABLE: Concrete Column Summary - IS 456-2000 Story Label Unique Name Design Section Station Design/Check Status PMM Rationaveenpnaidu1No ratings yet
- Bending Moment Criteria:::::: Area of Steel ProvidedDocument5 pagesBending Moment Criteria:::::: Area of Steel Providednaveenpnaidu1No ratings yet
- Calculation of Crackwidth: Inputs To Be Given by User Outputs From ExcelDocument10 pagesCalculation of Crackwidth: Inputs To Be Given by User Outputs From Excelnaveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MX MYDocument22 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MX MYnaveenpnaidu1No ratings yet
- Product End-of-Life Disassembly InstructionsDocument4 pagesProduct End-of-Life Disassembly InstructionsHoratiu SichitiuNo ratings yet
- Seismic Refraction MethodDocument9 pagesSeismic Refraction MethodSaroo MusicNo ratings yet
- Ch06c EntropyDocument46 pagesCh06c EntropyJoshua ZikuNo ratings yet
- Lecture 5Document18 pagesLecture 5Amr MohamedNo ratings yet
- MMW Worksheet 2.4-The Language of Relations and FunctionsDocument8 pagesMMW Worksheet 2.4-The Language of Relations and FunctionsZoren Divina BorretaNo ratings yet
- Section 3A Vector Representation-Euclidean SpaceDocument11 pagesSection 3A Vector Representation-Euclidean SpaceHazwan HamidNo ratings yet
- Proposed Syllabus For Work Shop On Composite Materials and TechnologyDocument2 pagesProposed Syllabus For Work Shop On Composite Materials and TechnologygnanasekarNo ratings yet
- "Derivation" of Canonical DistributionDocument2 pages"Derivation" of Canonical DistributionANDRÉS FELIPE SERRANO BARRIOSNo ratings yet
- R.O.H.S.A.R: Remotely Operated Human Search and Rescue RobotDocument22 pagesR.O.H.S.A.R: Remotely Operated Human Search and Rescue RobotKiritoNo ratings yet
- ACI 308R-16 - Guide o External Curing - PreviewDocument6 pagesACI 308R-16 - Guide o External Curing - PreviewHaniAmin0% (4)
- Student Handout Curve FittingDocument4 pagesStudent Handout Curve FittingLINDALVA RIBEIRO BARROSNo ratings yet
- EN500 Manual V1.0Document228 pagesEN500 Manual V1.0nntuan03100% (1)
- Rib SpacingDocument7 pagesRib Spacingjacob ellyNo ratings yet
- Multivariate ApproximationDocument296 pagesMultivariate ApproximationAlexander GolikovNo ratings yet
- Power SeriesDocument9 pagesPower SeriesJerwil CarinNo ratings yet
- DLL Earth Science Week 5Document5 pagesDLL Earth Science Week 5Jynepher Asok100% (2)
- Nonlinear Modeling of RC Structures Using Opensees: University of Naples Federico IiDocument66 pagesNonlinear Modeling of RC Structures Using Opensees: University of Naples Federico IiJorge Luis Garcia ZuñigaNo ratings yet
- Curtain Wall With HZ & VL Louvers Structural Calculation For Building a-PART (6) at AXIS (34-42) - A'Document59 pagesCurtain Wall With HZ & VL Louvers Structural Calculation For Building a-PART (6) at AXIS (34-42) - A'نصر عبدالسلامNo ratings yet
- Pipeline Hydraulic Design Proposal PDFDocument62 pagesPipeline Hydraulic Design Proposal PDFDhia SlamaNo ratings yet
- IPT PresentationDocument12 pagesIPT PresentationSandeep yekkaliNo ratings yet
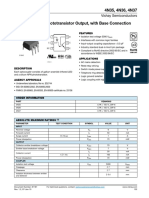
- Vishay Semiconductors: FeaturesDocument7 pagesVishay Semiconductors: FeaturesbhathiyaengNo ratings yet
- Level 2 Advanced Fluid MechanicsDocument40 pagesLevel 2 Advanced Fluid MechanicsRUGERO KeslyneNo ratings yet
- Gaussian Elimination: Major: All Engineering Majors Author(s) : Autar KawDocument94 pagesGaussian Elimination: Major: All Engineering Majors Author(s) : Autar KawHassan Funsho AkandeNo ratings yet
- Notice: Dated:23.05.2022Document3 pagesNotice: Dated:23.05.2022Biswanath BiswasNo ratings yet
- Review On Matrices (Definition and Coursera Systems of EquationsDocument2 pagesReview On Matrices (Definition and Coursera Systems of EquationsAlwin Palma jrNo ratings yet
- UnitsDocument206 pagesUnitsSomya Shukla100% (3)
- MAT 152 Lesson 1-7Document2 pagesMAT 152 Lesson 1-7MARY ESTHER A. DE ANGELNo ratings yet