You might also like
- Welcome To Augmented Reality 101 - AR Foundation Basics!: Further Your LearningDocument1 pageWelcome To Augmented Reality 101 - AR Foundation Basics!: Further Your LearningSelvapandiNo ratings yet
- Book 1Document19 pagesBook 1SelvapandiNo ratings yet
- Good TimeDocument3 pagesGood TimeSelvapandiNo ratings yet
- Lecture15 PDFDocument46 pagesLecture15 PDFSelvapandiNo ratings yet
- RtsDocument3 pagesRtsSelvapandiNo ratings yet
- Eula Microsoft Visual StudioDocument3 pagesEula Microsoft Visual StudioqwwerttyyNo ratings yet
- Python Foundation Nanodegree Syllabus PDFDocument2 pagesPython Foundation Nanodegree Syllabus PDFSelvapandiNo ratings yet
- 36Document5 pages36SelvapandiNo ratings yet
- Original Video CodeDocument2 pagesOriginal Video CodeSelvapandiNo ratings yet
- ScriptsDocument3 pagesScriptsSelvapandiNo ratings yet
- JQuery Notes For ProfessionalsDocument67 pagesJQuery Notes For ProfessionalsJorge CmtzNo ratings yet
- Vegetable Flash Cards for Classroom LearningDocument3 pagesVegetable Flash Cards for Classroom LearningSelvapandiNo ratings yet
- ScriptsDocument12 pagesScriptsGris DepandiNo ratings yet
- 602 Introducing Arkit Augmented Reality For IosDocument187 pages602 Introducing Arkit Augmented Reality For IosSelvapandiNo ratings yet
- AWS Amazon SES Best PracticesDocument13 pagesAWS Amazon SES Best PracticesYesenia GriffithNo ratings yet
- JQuery Notes For ProfessionalsDocument67 pagesJQuery Notes For ProfessionalsJorge CmtzNo ratings yet
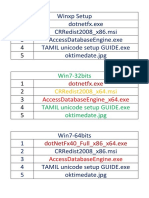
- Winxp Setup Dotnetfx - Exe Crredist2008 - X86.Msi Accessdatabaseengine - Exe Tamil Unicode Setup Guide - Exe Oktimedate - JPGDocument2 pagesWinxp Setup Dotnetfx - Exe Crredist2008 - X86.Msi Accessdatabaseengine - Exe Tamil Unicode Setup Guide - Exe Oktimedate - JPGSelvapandiNo ratings yet
- Sample Smart and Balanced Resume PDFDocument3 pagesSample Smart and Balanced Resume PDFidaNo ratings yet
- Probability CheatsheetDocument10 pagesProbability CheatsheetSatheeskumar100% (1)
- Winxp Setup Dotnetfx - Exe Crredist2008 - X86.Msi Accessdatabaseengine - Exe Tamil Unicode Setup Guide - Exe Oktimedate - JPGDocument2 pagesWinxp Setup Dotnetfx - Exe Crredist2008 - X86.Msi Accessdatabaseengine - Exe Tamil Unicode Setup Guide - Exe Oktimedate - JPGSelvapandiNo ratings yet
- Anaconda Training PDFDocument2 pagesAnaconda Training PDFSelvapandiNo ratings yet
- 08a Netflix PrizeDocument38 pages08a Netflix PrizeWang Chen YuNo ratings yet
- Fruit FlashDocument3 pagesFruit FlashMina Dini VeliuNo ratings yet
- MIT18 657F15 LecNote PDFDocument194 pagesMIT18 657F15 LecNote PDFMuhammad Sualeh AliNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SmartPTT Enterprise Radioserver Configurator GuideDocument246 pagesSmartPTT Enterprise Radioserver Configurator GuideSmartPTTNo ratings yet
- Ba Tcs-Basic 76 PDFDocument110 pagesBa Tcs-Basic 76 PDFBui Van ThongNo ratings yet
- Student Management System SrsDocument31 pagesStudent Management System SrsNaseem AhamadNo ratings yet
- Design and Implementation of a GPS Mobile Tracking System ThesisDocument88 pagesDesign and Implementation of a GPS Mobile Tracking System Thesisjo manNo ratings yet
- Eternity NX Matrix Sarvam: The Next-Generation Platforms For Unified CommunicationsDocument14 pagesEternity NX Matrix Sarvam: The Next-Generation Platforms For Unified CommunicationsmayankNo ratings yet
- ETERNITY LENX DatasheetDocument10 pagesETERNITY LENX DatasheetRabin KoiralaNo ratings yet
- SMS Tutorial: Operating Mode: SMS Text Mode and SMS PDU ModeDocument5 pagesSMS Tutorial: Operating Mode: SMS Text Mode and SMS PDU ModeMukhammad WildanNo ratings yet
- Student Management System Srs PDF FreeDocument30 pagesStudent Management System Srs PDF FreeLevko DovganNo ratings yet
- SmartPTT PLUS 9.0 Radioserver Configurator User GuideDocument184 pagesSmartPTT PLUS 9.0 Radioserver Configurator User GuideSmartPTTNo ratings yet
- Top Bulk SMS Service ProviderDocument9 pagesTop Bulk SMS Service ProviderGovind kumarNo ratings yet
- WEBEL SRS SingleMobilePlatform 1.2Document156 pagesWEBEL SRS SingleMobilePlatform 1.2sunitsinhaNo ratings yet
- How To Setup Unlimited SMS GatewayDocument14 pagesHow To Setup Unlimited SMS GatewayJerry E. DanielNo ratings yet
- Proposal SMS Gateway - SendQuickDocument12 pagesProposal SMS Gateway - SendQuickDian AyoeNo ratings yet
- Option N Modbus TCP IPDocument32 pagesOption N Modbus TCP IPJosé Miguel Echeverria HerediaNo ratings yet
- Aakash SMS: Bulk SMS Service ProviderDocument8 pagesAakash SMS: Bulk SMS Service ProviderAchyut Krishna GauliNo ratings yet
- Software Requirements Specification For Student Management: SystemDocument12 pagesSoftware Requirements Specification For Student Management: SystemDOROTHY SISRO SHAJANNo ratings yet
- Abb Sria 1-06-72dpiDocument88 pagesAbb Sria 1-06-72dpijhampiaNo ratings yet
- Tender of SmsDocument47 pagesTender of SmsSalman AliNo ratings yet
- Cert Proposal & QuotationDocument14 pagesCert Proposal & QuotationPreeti JaiswalNo ratings yet
- Send SMS Messages Using Microsoft SQL ExpressDocument17 pagesSend SMS Messages Using Microsoft SQL ExpressebgambaNo ratings yet
- Mightygps Itrack Gold: Gps Tracking For Fleet & SecurityDocument32 pagesMightygps Itrack Gold: Gps Tracking For Fleet & SecurityHafedh TrimecheNo ratings yet
- Appendix: GSM 7-Bit Default Alphabet Table (With Character Codes of ISO 8859 Latin 1)Document13 pagesAppendix: GSM 7-Bit Default Alphabet Table (With Character Codes of ISO 8859 Latin 1)Styv ArrowNo ratings yet
- SMSGATEWAYHUB HTTP API GuideDocument11 pagesSMSGATEWAYHUB HTTP API GuideKarthik SNo ratings yet
- GSM Equipment and Network Error Codes: Home Freeware Hardware Software Submit Resources Contact Us SponsorDocument6 pagesGSM Equipment and Network Error Codes: Home Freeware Hardware Software Submit Resources Contact Us SponsorRoger ZendongNo ratings yet
- SMS Based Poll Day MonitoringDocument39 pagesSMS Based Poll Day MonitoringAnuj GuptaNo ratings yet
- Short Message Service-SMS TutorialDocument164 pagesShort Message Service-SMS TutorialparasuramantNo ratings yet
- Global Position System About GPSDocument5 pagesGlobal Position System About GPSratheeshbrNo ratings yet
- MSWD Online Assistance Request and Monitoring System With SMS NotificationDocument36 pagesMSWD Online Assistance Request and Monitoring System With SMS NotificationMaria Kaye Cabeza Corpuz75% (4)
- v1 Chapter 1 5 Stall Management EDITEDDocument132 pagesv1 Chapter 1 5 Stall Management EDITEDLesterSanchezCueva100% (1)