You might also like
- Protective Functions FR-A800 Series - Inverters-FREQROL - MITSUBISHI ELECTRIC FADocument25 pagesProtective Functions FR-A800 Series - Inverters-FREQROL - MITSUBISHI ELECTRIC FADavid nguyenNo ratings yet
- Set-Up of Frequency Converter Parameters: Dokument1Document4 pagesSet-Up of Frequency Converter Parameters: Dokument1v2304451No ratings yet
- Mitsubishi Alarms Faults 3698Document13 pagesMitsubishi Alarms Faults 3698aboodabdualwahabNo ratings yet
- A F700 PID ControlDocument8 pagesA F700 PID ControlPham LongNo ratings yet
- Mx341 Avr Newage StamfordDocument4 pagesMx341 Avr Newage Stamfordabuzer1981No ratings yet
- Toshiba VF nc3 Inverter Settings FDocument9 pagesToshiba VF nc3 Inverter Settings FLê Văn HoạtNo ratings yet
- Generator Automatic Voltage Regulator Operation ManualDocument6 pagesGenerator Automatic Voltage Regulator Operation ManualSabyasachi KarNo ratings yet
- Ea341 Manual enDocument6 pagesEa341 Manual enVishnu VardhanNo ratings yet
- Operator PresentationDocument41 pagesOperator PresentationRoberto OrtegaNo ratings yet
- Avr PM300Document6 pagesAvr PM300menale libayeNo ratings yet
- Transformer Protection Sugg Spec1Document6 pagesTransformer Protection Sugg Spec1Tareq_EELNo ratings yet
- SS440 InstructionsDocument4 pagesSS440 Instructionsgurunathan14No ratings yet
- ESD5100 Series Speed Control UnitDocument2 pagesESD5100 Series Speed Control UnitJaimeCoelloNo ratings yet
- Grid Voltage Response TestingDocument4 pagesGrid Voltage Response TestingNarvin Raj ChandraNo ratings yet
- Woodward 505eDocument23 pagesWoodward 505emkoelrealNo ratings yet
- AVR341 Generator Automatic Voltage Regulator Operation ManualDocument6 pagesAVR341 Generator Automatic Voltage Regulator Operation ManualEmanuel Arguiñarena100% (1)
- 2301A Speed Control: ApplicationsDocument4 pages2301A Speed Control: ApplicationsFabio Andres Plata TorresNo ratings yet
- As480 Avr Newage StamfordDocument6 pagesAs480 Avr Newage Stamfordabuzer1981No ratings yet
- Gen Set Replacement Control Panel MODEL 540: Installation - Operation ManualDocument13 pagesGen Set Replacement Control Panel MODEL 540: Installation - Operation ManualBrianHazeNo ratings yet
- ACS580 Troubleshooting: Fault TracingDocument25 pagesACS580 Troubleshooting: Fault TracingMohamed Ayman Hefny MohamedNo ratings yet
- Model 348 ManualDocument5 pagesModel 348 Manualalexander vicenteNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesSx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsstmeuNo ratings yet
- Manual Regulador de Velocidade Gac Esd 5111 PDFDocument2 pagesManual Regulador de Velocidade Gac Esd 5111 PDFGugui68100% (1)
- Pti1000 Esd5100 SeriesDocument2 pagesPti1000 Esd5100 SeriesRamon Thales DomeniconiNo ratings yet
- Sa465 Automatic Voltage Regulator (Avr)Document4 pagesSa465 Automatic Voltage Regulator (Avr)KenNaNo ratings yet
- Fuji Frenic Mega GuideDocument673 pagesFuji Frenic Mega GuideSantiago RoseroNo ratings yet
- Motor Starter and HealthinessDocument25 pagesMotor Starter and HealthinessViresh ShaunakNo ratings yet
- Beta Servo Alarm ListDocument5 pagesBeta Servo Alarm ListtmsxptoNo ratings yet
- 60Hz - 50Hz Conversion Procedure C32Document13 pages60Hz - 50Hz Conversion Procedure C32Gustavo Pereira100% (1)
- ESD5100 Series Speed Control UnitDocument2 pagesESD5100 Series Speed Control Unitajcapetillog100% (2)
- 03 DifferentialElement EP 20120723Document9 pages03 DifferentialElement EP 20120723vdaNo ratings yet
- Ngine Overning Ystems: Generator Frequency Sensing Speed Control UnitDocument6 pagesNgine Overning Ystems: Generator Frequency Sensing Speed Control Unitjuan narvaezNo ratings yet
- SS341 ManualDocument6 pagesSS341 ManualLuis Migeru VelascoNo ratings yet
- Quick Guide For Frequency Inverter Setup.: Abb Acs 355Document3 pagesQuick Guide For Frequency Inverter Setup.: Abb Acs 355Ipan ArgonNo ratings yet
- AVR Sa465 05 03r2Document4 pagesAVR Sa465 05 03r2Cesar Senisse SaenzNo ratings yet
- VFDDocument5 pagesVFDRanjith KuymarNo ratings yet
- Electronic Engine Governor Controller Operation ManualDocument7 pagesElectronic Engine Governor Controller Operation ManualVinhNo ratings yet
- SX460 ManualDocument4 pagesSX460 ManualJonathan Heyneke100% (1)
- Sx440 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesSx440 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsJose PirulliNo ratings yet
- VR341 ManualDocument8 pagesVR341 Manualfahad pirzadaNo ratings yet
- ADVR-2200M: Universal Hybrid Analog-Digital Voltage Regulator Operation ManualDocument5 pagesADVR-2200M: Universal Hybrid Analog-Digital Voltage Regulator Operation ManualJasa Prima Diesel100% (1)
- Quick Start PF70Document18 pagesQuick Start PF70selvan_rsk761No ratings yet
- Generator Automatic Voltage Regulator Operation ManualDocument6 pagesGenerator Automatic Voltage Regulator Operation Manualanwarkj100% (1)
- 13 - Drive Controller - Operation ManualDocument14 pages13 - Drive Controller - Operation ManualMiguel RodriguezNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr)Document4 pagesSx460 Automatic Voltage Regulator (Avr)rajan_2002eee100% (1)
- Mx341 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesMx341 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsJuanPabloCastilloRojasNo ratings yet
- Abb Acs 355: Access Parameter ListDocument3 pagesAbb Acs 355: Access Parameter ListBoulos NassarNo ratings yet
- Coupling Failures in VFD Motor Fan: Torsional VibrationDocument15 pagesCoupling Failures in VFD Motor Fan: Torsional VibrationCairo Oil Refining Co.100% (1)
- CPT Series Control Transformers: Six Easy StepsDocument5 pagesCPT Series Control Transformers: Six Easy StepsMahfudz FauziNo ratings yet
- Ea460 Manual enDocument5 pagesEa460 Manual enomarnoamanNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesSx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsJose PirulliNo ratings yet
- MX 321Document4 pagesMX 321derickteo5971100% (1)
- Ec5111 6-09 PDFDocument5 pagesEc5111 6-09 PDFAnonymous M0OEZEKoGiNo ratings yet
- Stamford AVR SX460 PDFDocument4 pagesStamford AVR SX460 PDFNasredine AlainNo ratings yet
- Op Amps: Design, Application, and TroubleshootingFrom EverandOp Amps: Design, Application, and TroubleshootingRating: 5 out of 5 stars5/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- 2.3.0-Ev100 Diagram en PDFDocument2 pages2.3.0-Ev100 Diagram en PDFasif mahmoodNo ratings yet
- Ceiling Floor COP HLDocument3 pagesCeiling Floor COP HLasif mahmoodNo ratings yet
- Mik-El Elektronik San. Tic. Ltd. ŞtiDocument18 pagesMik-El Elektronik San. Tic. Ltd. Ştiasif mahmoodNo ratings yet
- STEP F5021B Main PCB Manual PDFDocument66 pagesSTEP F5021B Main PCB Manual PDFthanhhung_hy100% (1)
- Combivert: Instruction ManualDocument36 pagesCombivert: Instruction Manualruisengo100% (1)
- HB32 (BG15) - Manuel D'installation - GB - Du 30 11 00 (7261) 1 PDFDocument226 pagesHB32 (BG15) - Manuel D'installation - GB - Du 30 11 00 (7261) 1 PDFasif mahmoodNo ratings yet
- New Doc 2019-04-20 18.47.27 - 20190420185956Document29 pagesNew Doc 2019-04-20 18.47.27 - 20190420185956asif mahmoodNo ratings yet
- 5400 ErrorsDocument56 pages5400 Errorsasif mahmood100% (6)
- KONE Error Code Failure ReasonDocument3 pagesKONE Error Code Failure ReasonFidan Latifi67% (3)
- NICE3000Document322 pagesNICE3000SawonNo ratings yet
- Image To PDFDocument20 pagesImage To PDFasif mahmoodNo ratings yet
- Operation Manual SigmaDocument76 pagesOperation Manual Sigmalee82% (22)
- Manual Series 43E - EnG Rev 07Document36 pagesManual Series 43E - EnG Rev 07asif mahmood100% (2)
- Manual Series 43E - EnG Rev 07Document36 pagesManual Series 43E - EnG Rev 07asif mahmood100% (2)
- Inr Si47 1038g e PDFDocument107 pagesInr Si47 1038g e PDFsd23No ratings yet
- STEP F5021B Main PCB Manual PDFDocument66 pagesSTEP F5021B Main PCB Manual PDFthanhhung_hy100% (1)
- New Doc 2019-06-30 18.11.48 - 20190630181232 PDFDocument9 pagesNew Doc 2019-06-30 18.11.48 - 20190630181232 PDFasif mahmoodNo ratings yet
- Kone kdl16l y S WD 1pdf PDFDocument107 pagesKone kdl16l y S WD 1pdf PDFHenrique NogueiraNo ratings yet
- List of Parameters Programmable by CostomerDocument11 pagesList of Parameters Programmable by Costomerasif mahmoodNo ratings yet
- Scanned With CamscannerDocument9 pagesScanned With Camscannerasif mahmoodNo ratings yet
- STEP F5021B Main PCB Manual PDFDocument66 pagesSTEP F5021B Main PCB Manual PDFthanhhung_hy100% (1)
- STEP F5021B Main PCB Manual PDFDocument66 pagesSTEP F5021B Main PCB Manual PDFthanhhung_hy100% (1)
- Arl 200sDocument12 pagesArl 200sNenad Simonović75% (8)
- Bir INCIDocument84 pagesBir INCIkhaled88% (8)
- New Text DocumentDocument1 pageNew Text Documentasif mahmoodNo ratings yet
- Q4 GenPhysic2 USLeM3 Week-3 Jayar Version-3Document10 pagesQ4 GenPhysic2 USLeM3 Week-3 Jayar Version-3Arjen Lei VillafuerteNo ratings yet
- ABB Price Book 664Document1 pageABB Price Book 664EliasNo ratings yet
- EFR-25RM7Q: Product DatasheetDocument2 pagesEFR-25RM7Q: Product DatasheetRio AribowoNo ratings yet
- Op-Amp Comparator and The Op-Amp Comparator CircuitDocument15 pagesOp-Amp Comparator and The Op-Amp Comparator Circuitpwnkumar63No ratings yet
- Electrical SteelDocument13 pagesElectrical SteelAgustine SetiawanNo ratings yet
- Service Manual: Digital HD Videocassette RecorderDocument78 pagesService Manual: Digital HD Videocassette RecorderthewarapperumaiuNo ratings yet
- Zxdu68 B201 DC PDFDocument42 pagesZxdu68 B201 DC PDFronnymareNo ratings yet
- Repulsion CoilDocument6 pagesRepulsion CoilJim100% (1)
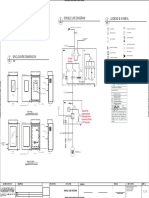
- Single Line Diagram 3 General Notes & Specification 1 Legend & Symbol 4Document1 pageSingle Line Diagram 3 General Notes & Specification 1 Legend & Symbol 4Abnar KumplishaNo ratings yet
- Digital Frequency MeterDocument3 pagesDigital Frequency MeterShanzay KhanNo ratings yet
- Electronics Q2 M5Document37 pagesElectronics Q2 M5James Zander Ignacio100% (1)
- Degine of 2 Stage CMOs Opamp......Document14 pagesDegine of 2 Stage CMOs Opamp......Vinay MishraNo ratings yet
- Cyber PowerDocument17 pagesCyber PowerArky KhanNo ratings yet
- Mcqs Part 1-mDocument19 pagesMcqs Part 1-msiraj udinNo ratings yet
- Dokumen - Tips - Zxdu68 t601 v41r03m01 DC Power System Product Description PDFDocument36 pagesDokumen - Tips - Zxdu68 t601 v41r03m01 DC Power System Product Description PDFTaha UsmaniNo ratings yet
- JPDocument67 pagesJPSaravanan ParamasivamNo ratings yet
- Recruitment Test Question of Gas Transmission Company Limited (GTCL)Document8 pagesRecruitment Test Question of Gas Transmission Company Limited (GTCL)Franch T. SougataNo ratings yet
- Form 5 Chapter 4 PhysicsDocument15 pagesForm 5 Chapter 4 PhysicsAngie Kong Su MeiNo ratings yet
- Instruction Manual: Installation - Operation - MaintenanceDocument43 pagesInstruction Manual: Installation - Operation - Maintenancesujon_shinpowerNo ratings yet
- Ch29 StudentDocument12 pagesCh29 StudentJA55EENo ratings yet
- Sepam Series 80 UndervoltageDocument3 pagesSepam Series 80 Undervoltagedinakaran2020No ratings yet
- LG 22lg30r CH Lp81kDocument29 pagesLG 22lg30r CH Lp81kCristian MaureiraNo ratings yet
- A1d1-X Csa - CeDocument3 pagesA1d1-X Csa - Ceharshithkumar20No ratings yet
- Wa0008.Document3 pagesWa0008.info.sanjudcontractorsltdNo ratings yet
- Ansys Maxwell Egtm IcerigiDocument2 pagesAnsys Maxwell Egtm IcerigiFeyza KaragözNo ratings yet
- LG W7020 Service ManualDocument107 pagesLG W7020 Service Manualxird66100% (10)
- Acharya Input Zero-1Document10 pagesAcharya Input Zero-1Nishanth NishanthNo ratings yet
- Pages From IGS-NT-SPI-3.1.0 Reference Guide2Document1 pagePages From IGS-NT-SPI-3.1.0 Reference Guide2Mohamed MossadNo ratings yet
- Origo Arc 150Document8 pagesOrigo Arc 150costelchelariuNo ratings yet
- Materi 210422Document7 pagesMateri 210422Hari YadiNo ratings yet