You might also like
- Kolekar 2019Document19 pagesKolekar 2019Naresh JonnaNo ratings yet
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- Non-Intrusive Torque Measurement For Rotating ShafDocument32 pagesNon-Intrusive Torque Measurement For Rotating ShafHanafi AjahNo ratings yet
- Process Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationFrom EverandProcess Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationNo ratings yet
- Bearing Condition Monitoring Using Vibration SignatureDocument7 pagesBearing Condition Monitoring Using Vibration SignaturemarnalaNo ratings yet
- IRJET V6I5165rahularghodeDocument5 pagesIRJET V6I5165rahularghodeSebin MathewNo ratings yet
- Isss 2014 1569923371Document9 pagesIsss 2014 1569923371bhuvan Gowda HKNo ratings yet
- Magnetoelastic Sensors - Commercial Readiness and OutlookDocument2 pagesMagnetoelastic Sensors - Commercial Readiness and OutlookAakash ChopraNo ratings yet
- Discrete Time ModelDocument10 pagesDiscrete Time ModelmuzammalNo ratings yet
- New Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorsDocument8 pagesNew Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorssebastianNo ratings yet
- Failure and Prospects of Modification in A Belt Conveyor SystemDocument4 pagesFailure and Prospects of Modification in A Belt Conveyor SystemGogyNo ratings yet
- 1 s2.0 S0263224121010757 MainDocument8 pages1 s2.0 S0263224121010757 MainMuhammad RiazNo ratings yet
- Articulo AcelerometrosDocument18 pagesArticulo AcelerometrosCarlos Roberto Castellanos PaterninaNo ratings yet
- 2018 - Kiran Kumar - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 376 - 012110Document7 pages2018 - Kiran Kumar - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 376 - 012110Eri SukocoNo ratings yet
- Pretoria Universiteit Testing RequirementsDocument29 pagesPretoria Universiteit Testing RequirementsChristian NissenNo ratings yet
- Sciencedirect: Design and Optimisation of An Electromagnetic Linear Guide For Ultra-Precision High Performance CuttingDocument4 pagesSciencedirect: Design and Optimisation of An Electromagnetic Linear Guide For Ultra-Precision High Performance CuttingEzequiel AriasNo ratings yet
- Frederike Nugteren - Final Report Graduation 12.05 2Document142 pagesFrederike Nugteren - Final Report Graduation 12.05 2Kok Jin OoiNo ratings yet
- Design of Neuro Fuzzy Sliding Mode Controller For Active Magnetic Bearing Control SystemDocument12 pagesDesign of Neuro Fuzzy Sliding Mode Controller For Active Magnetic Bearing Control Systemxiaoqi dengNo ratings yet
- Condition monitoring of rotating machinery through vibration analysisDocument5 pagesCondition monitoring of rotating machinery through vibration analysisEl Mehdi MakaveliNo ratings yet
- Fuzzy Logic Control of Automated Screw FasteningDocument9 pagesFuzzy Logic Control of Automated Screw FasteningValentina ScarabinoNo ratings yet
- Uncertainty Determination of A Novel Single F - 2022 - CIRP Journal of ManufactuDocument13 pagesUncertainty Determination of A Novel Single F - 2022 - CIRP Journal of ManufactuMark RNo ratings yet
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Energies 15 08260 v3Document39 pagesEnergies 15 08260 v313.ธนดล กองธรรมNo ratings yet
- Condition-Based Maintenance: Model vs. Statistics A Performance ComparisonDocument7 pagesCondition-Based Maintenance: Model vs. Statistics A Performance ComparisonLourds Egúsquiza EscuderoNo ratings yet
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocument6 pagesEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNo ratings yet
- Magnetic Gear Shifting Mechanism for AutomobilesDocument2 pagesMagnetic Gear Shifting Mechanism for AutomobilesShivam KohliNo ratings yet
- Condition Monitoring of Rotating Machinery Through Vibration AnalysisDocument5 pagesCondition Monitoring of Rotating Machinery Through Vibration AnalysisNidhal Ben KhalifaNo ratings yet
- Jurnal 1Document13 pagesJurnal 1reszaNo ratings yet
- Design of Fuzzi-Pid Tracking Controller For IndustDocument8 pagesDesign of Fuzzi-Pid Tracking Controller For IndustBernadetteNo ratings yet
- Mechatronics in Rotating MachineryDocument16 pagesMechatronics in Rotating MachineryPiotr PietrzakNo ratings yet
- Research Paper On Active Magnetic BearingDocument7 pagesResearch Paper On Active Magnetic Bearingafedpmqgr100% (1)
- Irjet Design and Analysis of Belt ConveyDocument7 pagesIrjet Design and Analysis of Belt ConveyMUHAMMAD NURFAIZ PERMANANo ratings yet
- Complex system health management using condition monitoring and test dataDocument15 pagesComplex system health management using condition monitoring and test dataচারুলতা নীর সেনNo ratings yet
- Comparative Study of Seismic Analysis of Bridge Substructure in Different Seismic Zones As Per IRC GuidelinesDocument9 pagesComparative Study of Seismic Analysis of Bridge Substructure in Different Seismic Zones As Per IRC GuidelinesIJRASETPublicationsNo ratings yet
- Ijresm V4 I7 100Document9 pagesIjresm V4 I7 100saxadi4814No ratings yet
- A Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandDocument8 pagesA Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandsouravghimireyNo ratings yet
- Statistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsDocument9 pagesStatistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsJOEL EZEQUIEL PACHECO MENANo ratings yet
- 2023-Rafal-Analysis_of_a_Segmented_Axial_Active_Magnetic_Bearing_for_Multi-MWDocument11 pages2023-Rafal-Analysis_of_a_Segmented_Axial_Active_Magnetic_Bearing_for_Multi-MWAlex CooperNo ratings yet
- A Theoretical and Experimental Procedure For Design Optimization of CVT BeltsDocument8 pagesA Theoretical and Experimental Procedure For Design Optimization of CVT Beltsmikael bezerra cotias dos santosNo ratings yet
- LQR Based Optimal Tuning of PID Controller For Tra PDFDocument11 pagesLQR Based Optimal Tuning of PID Controller For Tra PDFFrancisco A Torres VNo ratings yet
- Comparision of Torsional Vibration Measurement TechniquesDocument16 pagesComparision of Torsional Vibration Measurement TechniquesRikkinNo ratings yet
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocument6 pagesDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiNo ratings yet
- Clamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachDocument10 pagesClamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachHsan HaddarNo ratings yet
- CIGRÉ Winnipeg 2017 Colloquium paper on non-intrusive testing of AC circuit-breakersDocument8 pagesCIGRÉ Winnipeg 2017 Colloquium paper on non-intrusive testing of AC circuit-breakersOmar GutierrezNo ratings yet
- Ijirt155041 PaperDocument10 pagesIjirt155041 PaperAbhishek J. ModiNo ratings yet
- Health & Performance Monitoring Using Active Magnetic BearingsDocument104 pagesHealth & Performance Monitoring Using Active Magnetic BearingsAbhinav RajNo ratings yet
- Active Vibration Control of Ed Cantilever BeamDocument33 pagesActive Vibration Control of Ed Cantilever BeamCaner GençoğluNo ratings yet
- Li 2021Document26 pagesLi 2021mohamad reza SalehiNo ratings yet
- Ijream PaperDocument8 pagesIjream PaperJimsNo ratings yet
- Backlash 4Document8 pagesBacklash 4Ronny De La CruzNo ratings yet
- Guidelines for optimizing cogwheel design for back-bias speed sensorsDocument8 pagesGuidelines for optimizing cogwheel design for back-bias speed sensorsJefersonNo ratings yet
- Compliant Manipulators Springer 2014Document64 pagesCompliant Manipulators Springer 2014Alejandro GastonNo ratings yet
- Design of A Stator For A High-Speed Turbo-GeneratoDocument12 pagesDesign of A Stator For A High-Speed Turbo-Generatoolalekan fatai RotimiNo ratings yet
- Energy Conversion and Management: Jaeyun Lee, Bumkyoo ChoiDocument7 pagesEnergy Conversion and Management: Jaeyun Lee, Bumkyoo ChoiTika YuliNo ratings yet
- 10 18245-Ijaet 982530-1923815Document10 pages10 18245-Ijaet 982530-1923815Frankenstein ReichNo ratings yet
- A Novel Approach To Detection of Some Parameters For IMDocument6 pagesA Novel Approach To Detection of Some Parameters For IMsajs201No ratings yet
- Vibration Measurements by Tracking Laser Doppler Vibrometer On Automotive ComponentsDocument24 pagesVibration Measurements by Tracking Laser Doppler Vibrometer On Automotive ComponentsKajal TiwariNo ratings yet
- Adaptive Sliding-Mode Observer For Speed-Sensorless Control of Induction MotorsDocument8 pagesAdaptive Sliding-Mode Observer For Speed-Sensorless Control of Induction MotorsUma SathyadevanNo ratings yet
- Phasor XS Flange Face PaperDocument32 pagesPhasor XS Flange Face PapervrapciudorianNo ratings yet
- Distilasi Air LautDocument31 pagesDistilasi Air LautHanafi AjahNo ratings yet
- Marine Applications PDFDocument24 pagesMarine Applications PDFaminNo ratings yet
- Datum Torque Sensor and Torque Transducer Selection GuideDocument8 pagesDatum Torque Sensor and Torque Transducer Selection GuideHanafi AjahNo ratings yet
- Distilasi Air LautDocument31 pagesDistilasi Air LautHanafi AjahNo ratings yet
- Application of Phase Change Materials (PCM'S) To Preserve The Freshness of Seafood ProductsDocument6 pagesApplication of Phase Change Materials (PCM'S) To Preserve The Freshness of Seafood ProductsHanafi AjahNo ratings yet
- Bollard Pull TestDocument2 pagesBollard Pull TestHanafi AjahNo ratings yet
- DIY Load CellDocument65 pagesDIY Load CellhemkenbpNo ratings yet
- Measuring The Torque of A Combustion Engine.: ICMSC 2018Document5 pagesMeasuring The Torque of A Combustion Engine.: ICMSC 2018Hanafi AjahNo ratings yet
- Its All About Bollard PullDocument10 pagesIts All About Bollard PullHanafi AjahNo ratings yet
- M - Prep Conditioner ADocument5 pagesM - Prep Conditioner AHanafi AjahNo ratings yet
- Measuring torque and speed of marine diesel enginesDocument3 pagesMeasuring torque and speed of marine diesel enginesHanafi AjahNo ratings yet
- Maintenance and Repair For Diesel EnginesDocument424 pagesMaintenance and Repair For Diesel EnginesHanafi Ajah100% (5)
- A Feasibility Study of A Noncontact Torque SensorDocument8 pagesA Feasibility Study of A Noncontact Torque SensorHanafi AjahNo ratings yet
- DIY Load CellDocument65 pagesDIY Load CellhemkenbpNo ratings yet
- Applying The Wheatstone Bridge CircuitDocument36 pagesApplying The Wheatstone Bridge CircuitMichael Kang0% (1)
- Measuring The Torque of A Combustion Engine.: ICMSC 2018Document5 pagesMeasuring The Torque of A Combustion Engine.: ICMSC 2018Hanafi AjahNo ratings yet
- Applying The Wheatstone Bridge CircuitDocument36 pagesApplying The Wheatstone Bridge CircuitMichael Kang0% (1)
- A Novel Torque Sensor Based On The Angle of MagnetDocument5 pagesA Novel Torque Sensor Based On The Angle of MagnetHanafi AjahNo ratings yet
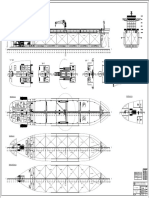
- GA Tanker 19500 DWT RevisedDocument1 pageGA Tanker 19500 DWT RevisedHanafi AjahNo ratings yet
- Kurikulum Diploma Mesin MaDocument3 pagesKurikulum Diploma Mesin MaHanafi AjahNo ratings yet
- Hasil Dye PenetrantDocument1 pageHasil Dye PenetrantHanafi AjahNo ratings yet
- Cohesive DevicesDocument34 pagesCohesive DevicesMaricel Baltazar0% (1)
- The Importance of Leadership and Teamwork in SchoolDocument7 pagesThe Importance of Leadership and Teamwork in SchoolGumunnan RajaNo ratings yet
- CV Ta - Geoteknik PDFDocument3 pagesCV Ta - Geoteknik PDFNurholisNo ratings yet
- Call Center StudyDocument189 pagesCall Center StudyAmit Rakshe100% (1)
- Qazi Assignment Jun 20Document8 pagesQazi Assignment Jun 20kamal62747No ratings yet
- Project ANTI-VAWC Profile and PlanDocument2 pagesProject ANTI-VAWC Profile and PlanShaboy L. Llanita100% (6)
- Englishtshiasant 00 EvanialaDocument272 pagesEnglishtshiasant 00 EvanialaGarvey LivesNo ratings yet
- Edu 203 - Field Observation PaperDocument8 pagesEdu 203 - Field Observation Paperapi-459810896No ratings yet
- Entrepreneurship 1Document40 pagesEntrepreneurship 1Nishtha SharmaNo ratings yet
- General Rules and Guidelines To DebatingDocument30 pagesGeneral Rules and Guidelines To DebatingArindam GhoshNo ratings yet
- The Life of Frank Lloyd WrightDocument33 pagesThe Life of Frank Lloyd WrightAhmed100% (4)
- List of Educational Institutions Which Have Sanskrit Phrases As Their Mottos PDFDocument5 pagesList of Educational Institutions Which Have Sanskrit Phrases As Their Mottos PDFAvinash WandreNo ratings yet
- Common Pitfalls in Statistical Analysis: Linear Regression AnalysisDocument4 pagesCommon Pitfalls in Statistical Analysis: Linear Regression AnalysisSillyBee1205No ratings yet
- Question NO 1 Ans Research ParadigmsDocument9 pagesQuestion NO 1 Ans Research ParadigmsWaqaarNo ratings yet
- C.L.R. James Mariners Renegades and Castaways The Story of Herman Melville and The World We Live inDocument178 pagesC.L.R. James Mariners Renegades and Castaways The Story of Herman Melville and The World We Live inBreixo Harguindey100% (1)
- John Adams - Defence of The Constitutions of Government of The United States of America, VOL 2Document466 pagesJohn Adams - Defence of The Constitutions of Government of The United States of America, VOL 2WaterwindNo ratings yet
- Summer Holiday Lesson PlanDocument2 pagesSummer Holiday Lesson PlanDragana MilosevicNo ratings yet
- C ElanchezhianDocument8 pagesC ElanchezhiankeshavuvceNo ratings yet
- French ConversationDocument151 pagesFrench Conversationapi-3804640No ratings yet
- Prize Giving and Speech Day at Precious Blood Secondary School On The 17TH of July 2015Document7 pagesPrize Giving and Speech Day at Precious Blood Secondary School On The 17TH of July 2015Patience100% (1)
- Serqual ModelDocument19 pagesSerqual ModelSuraj OVNo ratings yet
- An Introduction To Shristikanta LokeshvaraDocument4 pagesAn Introduction To Shristikanta LokeshvaraMin Bahadur ShakyaNo ratings yet
- ThesisDocument49 pagesThesisLarry Jeffries100% (3)
- Dont Be Left BehindDocument66 pagesDont Be Left BehindkameronkellyNo ratings yet
- School Name My Family - Listening Comprehension NameDocument2 pagesSchool Name My Family - Listening Comprehension NameDelia ChiraNo ratings yet
- Classical ConditioningDocument8 pagesClassical Conditioninganon-140609100% (2)
- Rinku DiDocument6 pagesRinku DiMou BiswasNo ratings yet
- AbsurdismDocument6 pagesAbsurdismHaleema Khalid100% (1)
- Lyotard Heidegger and The JewsDocument138 pagesLyotard Heidegger and The JewsDaniel CifuentesNo ratings yet
- Chapter 7Document53 pagesChapter 7PavithranNo ratings yet
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (156)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (409)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishFrom EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishRating: 4.5 out of 5 stars4.5/5 (18)
- The Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsFrom EverandThe Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsRating: 5 out of 5 stars5/5 (5)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (48)
- In Search of Schrödinger’s Cat: Quantum Physics and RealityFrom EverandIn Search of Schrödinger’s Cat: Quantum Physics and RealityRating: 4 out of 5 stars4/5 (380)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Paradox: The Nine Greatest Enigmas in PhysicsFrom EverandParadox: The Nine Greatest Enigmas in PhysicsRating: 4 out of 5 stars4/5 (57)
- Professor Maxwell's Duplicitous Demon: The Life and Science of James Clerk MaxwellFrom EverandProfessor Maxwell's Duplicitous Demon: The Life and Science of James Clerk MaxwellRating: 4.5 out of 5 stars4.5/5 (20)