You might also like
- Modular Artillery Charge System (Macs) Compatibility With The 155-Mm M114 Towed HowitzerDocument21 pagesModular Artillery Charge System (Macs) Compatibility With The 155-Mm M114 Towed Howitzerjitendra25252No ratings yet
- Projectile Driving Band Interaction With Gun BarrelsDocument6 pagesProjectile Driving Band Interaction With Gun Barrelsjitendra25252No ratings yet
- Gun Barrel Wear and Erosion Causes and MitigationDocument14 pagesGun Barrel Wear and Erosion Causes and Mitigationjitendra25252No ratings yet
- Evaluation of Projectile Ramming Process in New and Worn Smooth Barrels of GunsDocument9 pagesEvaluation of Projectile Ramming Process in New and Worn Smooth Barrels of Gunsjitendra25252No ratings yet
- Shock and Vibration Isolation for Jet Impingement CoolingDocument15 pagesShock and Vibration Isolation for Jet Impingement Coolingjitendra25252No ratings yet
- Interior Ballistics Simulation of Modular Charge Gun System Using MatlabDocument7 pagesInterior Ballistics Simulation of Modular Charge Gun System Using Matlabjitendra25252100% (1)
- Defense Technical Information Center Compilation Part NoticeDocument13 pagesDefense Technical Information Center Compilation Part Noticejitendra25252No ratings yet
- Flow Field Simulation and Efficiency Calculation of Muzzle Brake Based On ANSYS FluentDocument4 pagesFlow Field Simulation and Efficiency Calculation of Muzzle Brake Based On ANSYS Fluentjitendra25252No ratings yet
- Cutting Down the Kick: Understanding and Managing Large Caliber RecoilDocument22 pagesCutting Down the Kick: Understanding and Managing Large Caliber Recoiljitendra25252No ratings yet
- Python3 Tutorial PDFDocument512 pagesPython3 Tutorial PDFAriane AquinoNo ratings yet
- Inertially Stabilized Platforms For Precision PointingDocument55 pagesInertially Stabilized Platforms For Precision Pointingjitendra25252No ratings yet
- FAtigue of Wind Turbine PDFDocument1 pageFAtigue of Wind Turbine PDFjitendra25252No ratings yet
- Introduction To Solid Rocket PropulsionDocument17 pagesIntroduction To Solid Rocket PropulsionSujay SreedharNo ratings yet
- Fatigue Tank Trackes PDFDocument14 pagesFatigue Tank Trackes PDFjitendra25252No ratings yet
- AutonomyandArtificialIntelligence CLAWS (MP75FINAL)Document38 pagesAutonomyandArtificialIntelligence CLAWS (MP75FINAL)icitcellNo ratings yet
- Design and Manufacturing Process For A Ballistic MDocument7 pagesDesign and Manufacturing Process For A Ballistic Mjitendra25252No ratings yet
- Introduction To Hydraulics and Pneumatics PDFDocument43 pagesIntroduction To Hydraulics and Pneumatics PDFEbuka100% (1)
- Theoretical Calculation and Research On The Strength of A Artillery BarrelDocument5 pagesTheoretical Calculation and Research On The Strength of A Artillery Barreljitendra25252No ratings yet
- Fatigue Tank TrackesDocument14 pagesFatigue Tank Trackesjitendra25252No ratings yet
- Extreme Response Spectrum of A Random Vibration PDFDocument196 pagesExtreme Response Spectrum of A Random Vibration PDFjitendra25252No ratings yet
- Extreme Response Spectrum of A Random Vibration PDFDocument196 pagesExtreme Response Spectrum of A Random Vibration PDFjitendra25252No ratings yet
- AI in Evertyng Good For StudentDocument18 pagesAI in Evertyng Good For Studentjitendra25252No ratings yet
- Optimal ShockDocument16 pagesOptimal Shockjitendra25252No ratings yet
- Theoretical Calculation and Research On The Strength of A Artillery BarrelDocument5 pagesTheoretical Calculation and Research On The Strength of A Artillery Barreljitendra25252No ratings yet
- Optimal ShockDocument16 pagesOptimal Shockjitendra25252No ratings yet
- Mil STD 1316fDocument32 pagesMil STD 1316fjitendra25252No ratings yet
- Fatigue of Wind TurbineDocument1 pageFatigue of Wind Turbinejitendra25252No ratings yet
- Mil-A-12560h GDocument39 pagesMil-A-12560h Gjitendra25252No ratings yet
- Baes Ds Bofors 3PDocument4 pagesBaes Ds Bofors 3PVictor PileggiNo ratings yet
- Theoretical Calculation and Research On The Strength of A Artillery BarrelDocument5 pagesTheoretical Calculation and Research On The Strength of A Artillery Barreljitendra25252No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cryptography and Network Security": Sir Syed University of Engineering & TechnologyDocument5 pagesCryptography and Network Security": Sir Syed University of Engineering & TechnologySehar KhanNo ratings yet
- Public Authority CasesDocument11 pagesPublic Authority CasesAbhinav GoelNo ratings yet
- Efficiently Transfer Stock Between PlantsDocument6 pagesEfficiently Transfer Stock Between PlantsSantosh KumarNo ratings yet
- Practical Training Seminar Report FormatDocument8 pagesPractical Training Seminar Report FormatShrijeet PugaliaNo ratings yet
- Customer: Id Email Password Name Street1 Street2 City State Zip Country Phone TempkeyDocument37 pagesCustomer: Id Email Password Name Street1 Street2 City State Zip Country Phone TempkeyAgus ChandraNo ratings yet
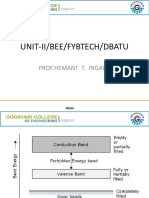
- Bee Unit-IiDocument98 pagesBee Unit-IiHemant Ingale100% (1)
- Günter Fella: Head of Purchasing AutomotiveDocument2 pagesGünter Fella: Head of Purchasing AutomotiveHeart Touching VideosNo ratings yet
- TMF1014 System Analysis & Design Semester 1, 2020/2021 APPENDIX C: Group Assignment Assessment RubricDocument4 pagesTMF1014 System Analysis & Design Semester 1, 2020/2021 APPENDIX C: Group Assignment Assessment RubricWe XaNo ratings yet
- G8 - Light& Heat and TemperatureDocument49 pagesG8 - Light& Heat and TemperatureJhen BonNo ratings yet
- E - Program Files (x86) - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Operation - ENDocument180 pagesE - Program Files (x86) - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Operation - ENJuan Cristóbal Rivera PuellesNo ratings yet
- CSR of DABUR Company..Document7 pagesCSR of DABUR Company..Rupesh kumar mishraNo ratings yet
- Chapter 5 PresentationDocument35 pagesChapter 5 PresentationSabeur Dammak100% (1)
- I/O Buffer Megafunction (ALTIOBUF) User GuideDocument54 pagesI/O Buffer Megafunction (ALTIOBUF) User GuideSergeyNo ratings yet
- Universiti Teknologi Mara Odl Test 1: Confidential 1 EM/ MAY 2020/MEM603Document4 pagesUniversiti Teknologi Mara Odl Test 1: Confidential 1 EM/ MAY 2020/MEM603000No ratings yet
- PackMan ReportDocument41 pagesPackMan ReportPrakash SamshiNo ratings yet
- Agricrop9 ModuleDocument22 pagesAgricrop9 ModuleMaria Daisy ReyesNo ratings yet
- Ficha de Seguridad Dispositivo Pruba Doble Recamara 2875 - 2876Document133 pagesFicha de Seguridad Dispositivo Pruba Doble Recamara 2875 - 2876janetth rubianoNo ratings yet
- Substitution in The Linguistics of Text and Grammatical ThoughtDocument17 pagesSubstitution in The Linguistics of Text and Grammatical ThoughtThảo HanahNo ratings yet
- Teaser Rheosolve D 15ASDocument2 pagesTeaser Rheosolve D 15ASwahyuni raufianiNo ratings yet
- Grade7Research 1st Quarter MeasuringDocument17 pagesGrade7Research 1st Quarter Measuringrojen pielagoNo ratings yet
- Function Apollo Amadeus: Sign In/OutDocument16 pagesFunction Apollo Amadeus: Sign In/OutMabs GaddNo ratings yet
- Java Pattern Programming AssignmentsDocument9 pagesJava Pattern Programming Assignmentstamj tamjNo ratings yet
- CV Template DixieDocument3 pagesCV Template DixieDarybelle BusacayNo ratings yet
- SABS Standards and Their Relevance to Conveyor SpecificationsDocument17 pagesSABS Standards and Their Relevance to Conveyor SpecificationsRobert Nicodemus Pelupessy0% (1)
- Regular expressions chapter 3 key conceptsDocument3 pagesRegular expressions chapter 3 key conceptsNabeel Ahmed0% (1)
- 3 6 17weekly Homework Sheet Week 23 - 5th Grade - CcssDocument3 pages3 6 17weekly Homework Sheet Week 23 - 5th Grade - Ccssapi-328344919No ratings yet
- Welder Training in SMAW, GTAW & GMAW Welding Engineering & NDT Consultancy Welding Engineering Related TrainingDocument4 pagesWelder Training in SMAW, GTAW & GMAW Welding Engineering & NDT Consultancy Welding Engineering Related TrainingKavin PrakashNo ratings yet
- EPFO Declaration FormDocument4 pagesEPFO Declaration FormSiddharth PednekarNo ratings yet
- C 60 A/XF: The Siam Refractory Industry Co.,LtdDocument1 pageC 60 A/XF: The Siam Refractory Industry Co.,LtdGaluhNo ratings yet
- Lanco Solar EPC leaderDocument19 pagesLanco Solar EPC leaderShabir TrambooNo ratings yet