You might also like
- CSCU CourseDocument12 pagesCSCU Courseعلوم نوین امیرکبیرNo ratings yet
- Deep Reinforcement Learning in Mario: Final Project Report of CS747: Foundations of Intelligent Learning AgentsDocument6 pagesDeep Reinforcement Learning in Mario: Final Project Report of CS747: Foundations of Intelligent Learning AgentsToonz NetworkNo ratings yet
- Research PaperDocument13 pagesResearch Paperaqib ahmedNo ratings yet
- Contour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorDocument6 pagesContour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorGuilherme OliveiraNo ratings yet
- A Floor Sensor System For Gait RecognitionDocument6 pagesA Floor Sensor System For Gait RecognitionNasir HussainNo ratings yet
- Raspberry PiDocument9 pagesRaspberry PiherusyahputraNo ratings yet
- JFR 10 MiskinDocument21 pagesJFR 10 Miskinapi-527107993No ratings yet
- Adaptive Sensing Scheme Using Naive Bayes Classification For Environment Monitoring With DroneDocument12 pagesAdaptive Sensing Scheme Using Naive Bayes Classification For Environment Monitoring With DroneDeekshithSrinivasNo ratings yet
- GT AUV Workshop PaperDocument37 pagesGT AUV Workshop Papermwest_spectraNo ratings yet
- Fast Animal Detection in Uav Images Using Convolutional Neural NetworksDocument4 pagesFast Animal Detection in Uav Images Using Convolutional Neural NetworksHui ShanNo ratings yet
- Ccece 2010 5575165Document6 pagesCcece 2010 5575165Andrés BuitragoNo ratings yet
- Tracking and Management of Deforestation and Related Activates Using Blockchain and IoTDocument10 pagesTracking and Management of Deforestation and Related Activates Using Blockchain and IoTIJRASETPublicationsNo ratings yet
- Huang 2019Document13 pagesHuang 2019ilkom.uhoNo ratings yet
- Rapid and High-Fidelity Subsurface Exploration With Multiple Aerial RobotsDocument14 pagesRapid and High-Fidelity Subsurface Exploration With Multiple Aerial RobotsHarshil NaikNo ratings yet
- A Behavior-Based ArchitectureDocument19 pagesA Behavior-Based Architecture9777907190No ratings yet
- Symmetry 14 01669Document16 pagesSymmetry 14 01669Mustafa Kemal AmbarNo ratings yet
- Habitat MonitoringDocument8 pagesHabitat Monitorings.reeganNo ratings yet
- Bayesian Filtering For Indoor Localization and Tracking in Wireless Sensor NetworksDocument13 pagesBayesian Filtering For Indoor Localization and Tracking in Wireless Sensor NetworksJames DanielNo ratings yet
- Seadronessee: A Maritime Benchmark For Detecting Humans in Open WaterDocument11 pagesSeadronessee: A Maritime Benchmark For Detecting Humans in Open WatergopineedivigneshNo ratings yet
- Nepal's Danfe Space Mission: Technology Demonstration Mission On A 3U CubeSat To Mitigate Glacial Lake Outburst FloodsDocument6 pagesNepal's Danfe Space Mission: Technology Demonstration Mission On A 3U CubeSat To Mitigate Glacial Lake Outburst FloodsSirash SayanjuNo ratings yet
- Proceedings of SpieDocument8 pagesProceedings of SpieThiago BewiahnNo ratings yet
- Limbs Detection and Tracking of Head-Fixed Mice For Behavioral Phenotyping Using Motion Tubes and Deep LearningDocument11 pagesLimbs Detection and Tracking of Head-Fixed Mice For Behavioral Phenotyping Using Motion Tubes and Deep LearningCony GSNo ratings yet
- NSC 93rd PaperDocument6 pagesNSC 93rd PaperKalimuthu PaulpandianNo ratings yet
- Engineering Challenges of Stationary Wireless Smart Ocean Observation SystemsDocument14 pagesEngineering Challenges of Stationary Wireless Smart Ocean Observation Systemsal shayokhNo ratings yet
- Ad Hoc Networks: Maneesha Vinodini RameshDocument17 pagesAd Hoc Networks: Maneesha Vinodini RameshAnesuishe DinhaNo ratings yet
- A Wireless Biosensor Network Using Autonomously Controlled AnimalsDocument6 pagesA Wireless Biosensor Network Using Autonomously Controlled AnimalsBishal UchilNo ratings yet
- CCD Imager Development For AstronomyDocument21 pagesCCD Imager Development For Astronomysd6433No ratings yet
- Papier Valentin Paru HALDocument9 pagesPapier Valentin Paru HALbarbara nicolasNo ratings yet
- 2012kingetal NanosatKa BandCommunications AParadigmShift SSC12 VI 9Document22 pages2012kingetal NanosatKa BandCommunications AParadigmShift SSC12 VI 9EalrNo ratings yet
- Soli Ubiquitous Gesture Sensing With Millimeter Wave RadarDocument19 pagesSoli Ubiquitous Gesture Sensing With Millimeter Wave RadarLeandro CarmeliniNo ratings yet
- State of The Art in Protocol Research For Underwater Acoustic Sensor NetworksDocument12 pagesState of The Art in Protocol Research For Underwater Acoustic Sensor NetworksAmmar AhsanNo ratings yet
- Remotesensing 12 02026Document18 pagesRemotesensing 12 02026RNGNo ratings yet
- Prediction of CBR by Deep Artificial Neural Networks With Hyperparameter Optimization by Simulated AnnealingDocument17 pagesPrediction of CBR by Deep Artificial Neural Networks With Hyperparameter Optimization by Simulated AnnealingApsae S14No ratings yet
- Instrumenting The World With Wireless Sensor NetworksDocument4 pagesInstrumenting The World With Wireless Sensor Networksshariifcqaadir985No ratings yet
- Efficient Location Protocol For Wireless Sensor NetworksDocument11 pagesEfficient Location Protocol For Wireless Sensor NetworksArnav GudduNo ratings yet
- Robotics and Autonomous Systems: Borja Bovcon Rok Mandeljc Janez Perš Matej KristanDocument13 pagesRobotics and Autonomous Systems: Borja Bovcon Rok Mandeljc Janez Perš Matej KristanavatorNo ratings yet
- Marine Robotics: An Improved Algorithm For Object Detection UnderwaterDocument9 pagesMarine Robotics: An Improved Algorithm For Object Detection UnderwaterAshis SardarNo ratings yet
- Mitrut Caraivan Et Al Multi-Purpose Underwater Data Collection SensorsDocument5 pagesMitrut Caraivan Et Al Multi-Purpose Underwater Data Collection SensorsmccatysNo ratings yet
- Offshore Asset Integrity ManagementDocument5 pagesOffshore Asset Integrity Managementamr habibNo ratings yet
- Deployment Analysis in Underwater Acoustic Wireless Sensor NetworksDocument8 pagesDeployment Analysis in Underwater Acoustic Wireless Sensor NetworksAshok KumarNo ratings yet
- Iot PPTDocument13 pagesIot PPTChaitra mahendraNo ratings yet
- Wireless Sensor Networks For Environmental Monitoring: The Sensorscope ExperienceDocument5 pagesWireless Sensor Networks For Environmental Monitoring: The Sensorscope ExperienceAshna WaseemNo ratings yet
- A Multi-Autonomous Underwater Vehicle System For Autonomous Tracking of Marine LifeDocument18 pagesA Multi-Autonomous Underwater Vehicle System For Autonomous Tracking of Marine LifeAnandNo ratings yet
- SIM HUMaLaOR2Document17 pagesSIM HUMaLaOR2Avishek ChakrabortyNo ratings yet
- A Novel Approach For Tracking of A Mobile Node Based On Particle Filter and TrilaterationDocument6 pagesA Novel Approach For Tracking of A Mobile Node Based On Particle Filter and TrilaterationNaveen KumarNo ratings yet
- Deep Learning For Shark Detection TasksDocument6 pagesDeep Learning For Shark Detection TasksFelipe Neira DíazNo ratings yet
- Madhuri Springer PaperDocument26 pagesMadhuri Springer PaperMadhuri RaoNo ratings yet
- Underwater Wireless Sensor Network: A Review: Shraddha S. Chafale, Prof. N.M. DhandeDocument5 pagesUnderwater Wireless Sensor Network: A Review: Shraddha S. Chafale, Prof. N.M. DhandeAnonymous lPvvgiQjRNo ratings yet
- Directed Diffusion For Wireless Sensor NetworkingDocument15 pagesDirected Diffusion For Wireless Sensor NetworkingpradeepmonaeNo ratings yet
- Computational IntelligenceDocument20 pagesComputational IntelligenceJULIET MOKWUGWONo ratings yet
- A Methodology To Find The Boundary of Wireless Sensor NetworkDocument11 pagesA Methodology To Find The Boundary of Wireless Sensor NetworkMuhammad YasirNo ratings yet
- High-Accuracy Localization For Indoor Group Users Based On Extended Kalman FilterDocument11 pagesHigh-Accuracy Localization For Indoor Group Users Based On Extended Kalman Filteraseel jadallahNo ratings yet
- Parasitic Mobility For Pervasive Sensor NetworksDocument25 pagesParasitic Mobility For Pervasive Sensor Networkssayali thakurNo ratings yet
- Hammerhead Shark Detection Using Regions With Convolutional Neural NetworksDocument6 pagesHammerhead Shark Detection Using Regions With Convolutional Neural NetworksFelipe Neira DíazNo ratings yet
- Enhancing The Security, Reliability, and Data Integrity Issues in The Internet of Things by Implementing Block Chain Strategy in Mining: Challenges and SolutionsDocument7 pagesEnhancing The Security, Reliability, and Data Integrity Issues in The Internet of Things by Implementing Block Chain Strategy in Mining: Challenges and SolutionsBiswaranjan MishraNo ratings yet
- Cognitive Radio Research and Implementation ChallengesDocument2 pagesCognitive Radio Research and Implementation ChallengesMisfa SusantoNo ratings yet
- Remote Image Classification Using Improved Ant Colony MechanismDocument3 pagesRemote Image Classification Using Improved Ant Colony MechanismerpublicationNo ratings yet
- Design Development and Deployment of A Wireless Sensor Network For Detection of Landslides2014Ad Hoc NetworksDocument17 pagesDesign Development and Deployment of A Wireless Sensor Network For Detection of Landslides2014Ad Hoc NetworksUmrohDianNo ratings yet
- (15200426 - Journal of Atmospheric and Oceanic Technology) Automatic Classification of Biological Targets in A Tidal Channel Using A Multibeam SonarDocument19 pages(15200426 - Journal of Atmospheric and Oceanic Technology) Automatic Classification of Biological Targets in A Tidal Channel Using A Multibeam Sonarabdeljalil elhadiriNo ratings yet
- Face Tracking Algorithm For Tracking Target in WSNDocument8 pagesFace Tracking Algorithm For Tracking Target in WSNBanupriya-No ratings yet
- Swarm Robot System For Underwater Communication NetworkDocument8 pagesSwarm Robot System For Underwater Communication Network283472 ktr.phd.ece.19No ratings yet
- Module 13 Securing MobileDocument24 pagesModule 13 Securing Mobileعلوم نوین امیرکبیرNo ratings yet
- React Nanodegree Syllabus: Before You StartDocument4 pagesReact Nanodegree Syllabus: Before You Startعلوم نوین امیرکبیرNo ratings yet
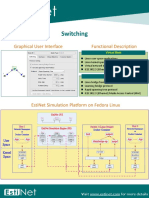
- EstiNet 10.0 Brief Switching 20170814.00Document1 pageEstiNet 10.0 Brief Switching 20170814.00علوم نوین امیرکبیرNo ratings yet
- EstiNet 10.0 Brief Wi-Fi Network 20170814.00Document1 pageEstiNet 10.0 Brief Wi-Fi Network 20170814.00علوم نوین امیرکبیرNo ratings yet
- EstiNet 10.0 Brief Simulation Platform 20170814.00Document1 pageEstiNet 10.0 Brief Simulation Platform 20170814.00علوم نوین امیرکبیرNo ratings yet
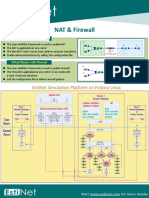
- EstiNet 10.0 Brief NAT and Firewall 20170814.00Document1 pageEstiNet 10.0 Brief NAT and Firewall 20170814.00علوم نوین امیرکبیرNo ratings yet
- Routing: Graphical User Interface Functional DescriptionDocument1 pageRouting: Graphical User Interface Functional Descriptionعلوم نوین امیرکبیرNo ratings yet
- DHCP and DNS: Graphical User InterfaceDocument1 pageDHCP and DNS: Graphical User Interfaceعلوم نوین امیرکبیرNo ratings yet
- MIS Important QuestionsDocument11 pagesMIS Important QuestionsShubhadeep SinghaNo ratings yet
- Eclipse Installation GuideDocument40 pagesEclipse Installation GuideahmedNo ratings yet
- Create An Android ProjectDocument17 pagesCreate An Android ProjectAkshaya ThengodeNo ratings yet
- FB103 ManualDocument94 pagesFB103 Manualgabiacu123100% (2)
- Python Programming: An Introduction To Computer Science: Computing With NumbersDocument42 pagesPython Programming: An Introduction To Computer Science: Computing With NumbersYacobNo ratings yet
- Nonlinear Structural Design Optimization of Cable Stayed BridgesDocument9 pagesNonlinear Structural Design Optimization of Cable Stayed Bridgesw1000000No ratings yet
- Amity University - MSCIT - Assignments - MCQDocument15 pagesAmity University - MSCIT - Assignments - MCQNikunj JasaniNo ratings yet
- C++ File 8Document46 pagesC++ File 8Kumar kNo ratings yet
- 0 - Introduction PDFDocument3 pages0 - Introduction PDFDan EnzerNo ratings yet
- Computational Chunking in Chess PDFDocument211 pagesComputational Chunking in Chess PDFTran VuNo ratings yet
- AI Lab 3Document3 pagesAI Lab 3haroon100% (1)
- 3D Beamforming (ERAN12.1 05)Document50 pages3D Beamforming (ERAN12.1 05)meraj ashrafNo ratings yet
- CPU Design HOWTO PDFDocument21 pagesCPU Design HOWTO PDFSelvaraj VillyNo ratings yet
- 01 How To Read A PaperDocument3 pages01 How To Read A PaperLeo NevaresNo ratings yet
- Site Assessment WorksheetDocument5 pagesSite Assessment Worksheetnish_angreNo ratings yet
- Battery Monitoring Unit Using SCADADocument6 pagesBattery Monitoring Unit Using SCADAInnovative Research PublicationsNo ratings yet
- Traducion Manual CworksDocument25 pagesTraducion Manual CworksCamilo De Jesus Pipe100% (1)
- Learning Kernel Classifiers. Theory and AlgorithmsDocument371 pagesLearning Kernel Classifiers. Theory and Algorithmsngelectronic5226100% (2)
- 2CDS200936R0001 s2c h11l Auxiliary ContactDocument2 pages2CDS200936R0001 s2c h11l Auxiliary ContactJhonny Velasquez PerezNo ratings yet
- P.Senthil Kumar: Sap - Sr. Plant Maintenance ConsultantDocument6 pagesP.Senthil Kumar: Sap - Sr. Plant Maintenance Consultantolecosas4273No ratings yet
- Lyx FunctionsDocument44 pagesLyx FunctionspanmergeNo ratings yet
- National and State Standards For Algebra I LessonsDocument23 pagesNational and State Standards For Algebra I Lessonsapi-341352321No ratings yet
- Tallyerp9-Book-Order HTMLDocument6 pagesTallyerp9-Book-Order HTMLAakash JainNo ratings yet
- Power Simulation Lab Record NEWDocument57 pagesPower Simulation Lab Record NEWsakthisrinivassNo ratings yet
- Wait EventDocument8 pagesWait Eventgetsatya347No ratings yet
- Computer Graphics NotesDocument58 pagesComputer Graphics NoteshajihalviNo ratings yet
- File ListDocument42 pagesFile ListVasiloi RobertNo ratings yet
- Chandra - Auditing Cloud ComputingDocument17 pagesChandra - Auditing Cloud Computingwawan_goodNo ratings yet
- Monitoring Exadata PerformanceDocument20 pagesMonitoring Exadata PerformanceMohd WaseemNo ratings yet