You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Ia Introduction Basics PaperDocument10 pagesIa Introduction Basics PaperEliel Carreto MorenoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Situatie Infectii Coronavirus (COVID-19) - 21.03.2020Document7 pagesSituatie Infectii Coronavirus (COVID-19) - 21.03.2020MadaMadutsaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- C 06296052Document3 pagesC 06296052MadaMadutsaNo ratings yet
- MCDOC03154646 Bosch Vacuum Brochure 2019 1 AprDocument44 pagesMCDOC03154646 Bosch Vacuum Brochure 2019 1 AprMadaMadutsaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- XSMax SpecsDocument3 pagesXSMax SpecsMadaMadutsaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Apple product battery safety sheetDocument14 pagesApple product battery safety sheetSid Michael100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Folding NapkinsDocument15 pagesFolding NapkinsMia VeronNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- UH615T 55.spec 161103Document2 pagesUH615T 55.spec 161103MadaMadutsaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- 4aa5 4598eeeDocument32 pages4aa5 4598eeeMadaMadutsaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Learn How To Play Poker Like A ProDocument10 pagesLearn How To Play Poker Like A ProJuan Pablo Rocha AmadoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Redmi Note 5A enDocument9 pagesRedmi Note 5A enEmmNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- NVIDIA Brochure 2018Document35 pagesNVIDIA Brochure 2018MadaMadutsaNo ratings yet
- PC Sept Oct 2018Document25 pagesPC Sept Oct 2018Tan Kien HockNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Mineral 2019 CA Water Quality ReportDocument5 pagesMineral 2019 CA Water Quality ReportMadaMadutsaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- NVIDIA Turing Architecture WhitepaperDocument86 pagesNVIDIA Turing Architecture WhitepaperMadaMadutsaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Wedding Planner PDFDocument32 pagesWedding Planner PDFAndrew Cox100% (1)
- Huawei p20 Pro User Guide (Clt-l09&l29, Emui9.0 - 01, En-Gb)Document80 pagesHuawei p20 Pro User Guide (Clt-l09&l29, Emui9.0 - 01, En-Gb)MadaMadutsaNo ratings yet
- Fdrax30 Ax33 Axp33 Axp35 en OmDocument56 pagesFdrax30 Ax33 Axp33 Axp35 en OmSPAPUKYANNo ratings yet
- Galaxy S10 IChanged Trade in Campaign TNCDocument11 pagesGalaxy S10 IChanged Trade in Campaign TNCMadaMadutsaNo ratings yet
- 2018 Q2 ROG Product Guide PreviewDocument48 pages2018 Q2 ROG Product Guide PreviewMadaMadutsaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Welcome To The World of Playstation: Get Your Ps4 Up and Running With This Handy Quick Start GuideDocument17 pagesWelcome To The World of Playstation: Get Your Ps4 Up and Running With This Handy Quick Start GuideMadaMadutsaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- ZTE Blade A460 PDFDocument102 pagesZTE Blade A460 PDFras_digaoNo ratings yet
- Passat Estate Viii BrochureDocument29 pagesPassat Estate Viii BrochureMadaMadutsaNo ratings yet
- The Flower BookDocument35 pagesThe Flower BookMadaMadutsaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- HUAWEI P30 Pro User Guide (VOG-L09&L29&L04, EMUI9.1 - 01, EN) PDFDocument146 pagesHUAWEI P30 Pro User Guide (VOG-L09&L29&L04, EMUI9.1 - 01, EN) PDFalelendoNo ratings yet
- Macbook Air Users GuideDocument76 pagesMacbook Air Users GuideEric Li CheungtasticNo ratings yet
- 5G Nework Architecture A High Level View HuaweiDocument21 pages5G Nework Architecture A High Level View HuaweiRudyno100% (2)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Gold 2018Document142 pagesGold 2018histoginoNo ratings yet
- Fashion Revolution With GucciDocument63 pagesFashion Revolution With GucciMadaMadutsaNo ratings yet
- Active and Passive Cooling Technologies For Thermal Management of AvionicsDocument10 pagesActive and Passive Cooling Technologies For Thermal Management of AvionicsdavidNo ratings yet
- Unit4 Dbms PDFDocument66 pagesUnit4 Dbms PDFRS GamerNo ratings yet
- 01-RH124 Red Hat System Administration IIDocument4 pages01-RH124 Red Hat System Administration IIpimentel-diogo2056No ratings yet
- Department of Education: Republic of The PhilippinesDocument51 pagesDepartment of Education: Republic of The PhilippinesChrystal Khey MendozaNo ratings yet
- Conference Flyer ChosenDocument4 pagesConference Flyer ChosenOluwatobi OgunfoworaNo ratings yet
- Iit Ashram: Guj - Board Pattern Test-7Document6 pagesIit Ashram: Guj - Board Pattern Test-7rult007No ratings yet
- Xray Order FormDocument1 pageXray Order FormSN Malenadu CreationNo ratings yet
- 3D Solar System With Opengl and C#Document4 pages3D Solar System With Opengl and C#Shylaja GNo ratings yet
- Bekkersdal Business Hive Close Out ReportDocument19 pagesBekkersdal Business Hive Close Out ReportMichael Benhura100% (2)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Abcd AirtelDocument12 pagesAbcd AirtelPrakhar RatheeNo ratings yet
- PDFDocument478 pagesPDFPriyaranjan PradhanNo ratings yet
- Mechanik Lammert ContentDocument3 pagesMechanik Lammert Contentapi-129423309No ratings yet
- Angle Beam Transducer Dual ElementDocument5 pagesAngle Beam Transducer Dual ElementWilliam Cubillos PulidoNo ratings yet
- 2016 Practical Theory Questions SolutionDocument36 pages2016 Practical Theory Questions Solutionsheeess gaadaNo ratings yet
- Cot 1 Detailed Lesson Plan in Science 10Document3 pagesCot 1 Detailed Lesson Plan in Science 10Arlen FuentebellaNo ratings yet
- FulfillerDocument8 pagesFulfillermanojeil1No ratings yet
- Developmental AssessmentDocument15 pagesDevelopmental AssessmentShailesh MehtaNo ratings yet
- "Leadership Does Not Always Wear The Harness of Compromise." - Woodrow WilsonDocument3 pages"Leadership Does Not Always Wear The Harness of Compromise." - Woodrow WilsonAmbreen Zaineb/Lecturer BKR/Economics and BANo ratings yet
- RGB PDFDocument35 pagesRGB PDFGestion Medios Zamba ColorsNo ratings yet
- Band Theory of Soids5!1!13Document20 pagesBand Theory of Soids5!1!13Ravi Kumar BanalaNo ratings yet
- Fast Arithmetic TipsDocument20 pagesFast Arithmetic TipsDumitru D. DRAGHIANo ratings yet
- Buwis ButilDocument2 pagesBuwis ButilHelbert Agluba PaatNo ratings yet
- Class Record (Science 9) S.Y. 2020-2021Document8 pagesClass Record (Science 9) S.Y. 2020-2021Wilmar EspinosaNo ratings yet
- Early Daoist Dietary Practices: Examining Ways To Health and Longevity. by Shawn ArthurDocument6 pagesEarly Daoist Dietary Practices: Examining Ways To Health and Longevity. by Shawn ArthurlsdkNo ratings yet
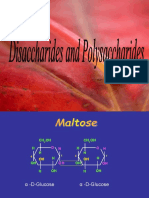
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Centrifuge PDFDocument11 pagesCentrifuge PDFسراء حيدر كاظمNo ratings yet
- Business Research Study Material - Calicut UniversityDocument50 pagesBusiness Research Study Material - Calicut UniversityDr Linda Mary SimonNo ratings yet
- Moana Taka PartnershipDocument2 pagesMoana Taka Partnershipself sayidNo ratings yet
- BTechSyllabus EC PDFDocument140 pagesBTechSyllabus EC PDFHHNo ratings yet
- ADP Pink Diamond Investment Guide 2023Document47 pagesADP Pink Diamond Investment Guide 2023sarahNo ratings yet