You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Speakout 3rd B1+ SB KeysDocument42 pagesSpeakout 3rd B1+ SB KeysИрина СивачукNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- FKM 95 Compound 514162Document1 pageFKM 95 Compound 514162heningputriNo ratings yet
- PDFDocument432 pagesPDFheningputriNo ratings yet
- Safety EquipmentDocument16 pagesSafety EquipmentheningputriNo ratings yet
- Asado PDFDocument89 pagesAsado PDFheningputriNo ratings yet
- Short-Circuit AnalysisDocument13 pagesShort-Circuit AnalysisheningputriNo ratings yet
- Windows HackingDocument69 pagesWindows HackingLuis Miguel Blad100% (1)
- WORKSHEET 6: Variables: 1 Quarter Learning Material in Grade 7-Enriched ScienceDocument4 pagesWORKSHEET 6: Variables: 1 Quarter Learning Material in Grade 7-Enriched ScienceSherbert Ice cream100% (1)
- Bombs: Protecting People and PropertyDocument32 pagesBombs: Protecting People and PropertyantiqbabilonNo ratings yet
- Latihan NormalisasiDocument3 pagesLatihan NormalisasiFadil0% (1)
- GB Training PDFDocument55 pagesGB Training PDFSundar BaluNo ratings yet
- Weld Joint Design and Weld SymbolDocument49 pagesWeld Joint Design and Weld SymbolArdser Avico100% (2)
- Drives: AC Inverters Sensorless Vector Closed Loop Vector Servo Drives DC Drives MotorsDocument44 pagesDrives: AC Inverters Sensorless Vector Closed Loop Vector Servo Drives DC Drives Motorsjohxav10No ratings yet
- Islamic University: Regular Examination Form (July - 2015)Document2 pagesIslamic University: Regular Examination Form (July - 2015)WaniBazillaNo ratings yet
- σcosθ ρgd σ = surface tension in N/m θ = wetting angle, 0 for water d = diameter of tube in m ρ = density of fluidDocument1 pageσcosθ ρgd σ = surface tension in N/m θ = wetting angle, 0 for water d = diameter of tube in m ρ = density of fluidJustine Ejay MoscosaNo ratings yet
- Detailed Lesson Plan in Math 5Document6 pagesDetailed Lesson Plan in Math 5Mountain DrewNo ratings yet
- Travel DiariesDocument2 pagesTravel DiariessohamNo ratings yet
- Jutoh PlusDocument34 pagesJutoh Plusrenio75No ratings yet
- Power of Imagination in SadhanaDocument7 pagesPower of Imagination in SadhanaSwami VedatitanandaNo ratings yet
- Organizational Structures - Handout 1Document24 pagesOrganizational Structures - Handout 1jack reevesNo ratings yet
- Practical 2: Investigating The Universe - Gravity: T, Depends On The Length of The String and The GDocument3 pagesPractical 2: Investigating The Universe - Gravity: T, Depends On The Length of The String and The GRegie Sacil EspiñaNo ratings yet
- 1 PBDocument5 pages1 PBwahyuhartanti hutamiNo ratings yet
- MSCCFT Programme Guide - 2 PDFDocument68 pagesMSCCFT Programme Guide - 2 PDFayyappan.ashok6713No ratings yet
- Template For JournalDocument2 pagesTemplate For JournalNastarres SoulmatesNo ratings yet
- Verification OverviewDocument123 pagesVerification OverviewSamNo ratings yet
- Comparison and ContrastDocument9 pagesComparison and ContrastCrash BandicootNo ratings yet
- T-Share Maximization MethodologyDocument13 pagesT-Share Maximization MethodologyLuis Orlando SánchezNo ratings yet
- Research PaperDocument20 pagesResearch PaperAngel Candare76% (21)
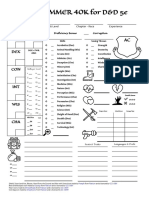
- WARHAMMER 40K For D&D 5e: Character Name Class & Level Chapter - Race ExperienceDocument1 pageWARHAMMER 40K For D&D 5e: Character Name Class & Level Chapter - Race ExperienceJacob CooperNo ratings yet
- Data Acquisition in MATLAB PDFDocument30 pagesData Acquisition in MATLAB PDFjaneprice100% (1)
- WaterfloodingDocument29 pagesWaterfloodingAdel Al-Enazi100% (1)
- PhdThesis SheffieldDocument202 pagesPhdThesis SheffieldDebasisMohapatraNo ratings yet
- Farnaz Thesis PDFDocument145 pagesFarnaz Thesis PDFnurdin_sumantriNo ratings yet
- Social Project ManagementDocument39 pagesSocial Project Managementfiki admpublikNo ratings yet