You might also like
- Video For Linux 2 V 4 L 2: by Rahul C Alphaics CorpDocument15 pagesVideo For Linux 2 V 4 L 2: by Rahul C Alphaics CorpRahul CNo ratings yet
- Design and Implementation of Wireless Multimedia Sensor Network Nodes Based On Linux OSDocument12 pagesDesign and Implementation of Wireless Multimedia Sensor Network Nodes Based On Linux OSN Putra SastraNo ratings yet
- Expt 2Document8 pagesExpt 2Shivam AndureNo ratings yet
- 6 Device Driver ControllerDocument32 pages6 Device Driver ControllerEdson Pires da Silva100% (1)
- Emu LogDocument4 pagesEmu LogTsunayoshi DiegoNo ratings yet
- V4L2 API DocsDocument2 pagesV4L2 API DocsGaurav PurohitNo ratings yet
- Embedded Systems Lab ManualDocument60 pagesEmbedded Systems Lab Manualtmuthu123100% (1)
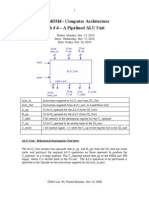
- ECE 4DM4 - Computer Architecture Lab # 4 - A Pipelined ALU UnitDocument8 pagesECE 4DM4 - Computer Architecture Lab # 4 - A Pipelined ALU UnitsantoshmphilNo ratings yet
- Microprocessing Mini Project ReportDocument9 pagesMicroprocessing Mini Project ReportAthen OkiffNo ratings yet
- ECAPP Lab6 PDFDocument3 pagesECAPP Lab6 PDFIsaiah RafaelNo ratings yet
- Lab 1Document10 pagesLab 1zagarzusemNo ratings yet
- Delhi Technological University: Ec-306 Embedded Systems Lab FileDocument7 pagesDelhi Technological University: Ec-306 Embedded Systems Lab File2K19/EC/192 SWASTIK SHARMANo ratings yet
- STM32 Tutorial 07 - GPIO Interrupts (EXTI) Using HAL (And FreeRTOS)Document5 pagesSTM32 Tutorial 07 - GPIO Interrupts (EXTI) Using HAL (And FreeRTOS)Marcelo Roberto GadottiNo ratings yet
- Delhi Technological University: Ec-306 Embedded Systems Lab FileDocument6 pagesDelhi Technological University: Ec-306 Embedded Systems Lab File2K19/EC/192 SWASTIK SHARMANo ratings yet
- Delhi Technological University: Ec-306 Embedded Systems Lab FileDocument5 pagesDelhi Technological University: Ec-306 Embedded Systems Lab File2K19/EC/192 SWASTIK SHARMANo ratings yet
- Image Processing: Thinhuv - Ios TeamDocument22 pagesImage Processing: Thinhuv - Ios TeamLê Phương TiếnNo ratings yet
- ARM Assembly Language Programs and GPIO ControlDocument47 pagesARM Assembly Language Programs and GPIO Controllog4iqbalNo ratings yet
- L298N DC Motor ProjectrathayDocument26 pagesL298N DC Motor ProjectrathayKim CươngNo ratings yet
- DTU EMBEDDED LAB REPORT ON BLINKING LED USING PIC MICROCONTROLLERDocument6 pagesDTU EMBEDDED LAB REPORT ON BLINKING LED USING PIC MICROCONTROLLER2K19/EC/192 SWASTIK SHARMANo ratings yet
- BHUSA09 Neilson NetscreenDead PAPERDocument24 pagesBHUSA09 Neilson NetscreenDead PAPERNguyen NMNo ratings yet
- AVRStudio C Programming With Arduino RevC PDFDocument40 pagesAVRStudio C Programming With Arduino RevC PDFEduardo Garcia BreijoNo ratings yet
- Lab2-Gpio AnDocument28 pagesLab2-Gpio Anhot_blasterNo ratings yet
- LaunchDocument1,911 pagesLaunchlordravenbladeNo ratings yet
- Olympus NDT Hardware DLLDocument26 pagesOlympus NDT Hardware DLLBoulHich BoulHichNo ratings yet
- System Compatibility ReportDocument4 pagesSystem Compatibility ReportVigniswara VickyNo ratings yet
- Report 2Document8 pagesReport 2moenali338No ratings yet
- Ipmi Tool CommandsDocument7 pagesIpmi Tool CommandsSalman SaluNo ratings yet
- DDP Lab 3v2Document11 pagesDDP Lab 3v2Eduardo ToribioNo ratings yet
- Deployment of Mpeg4 CompressionDocument5 pagesDeployment of Mpeg4 CompressionHung NguyenNo ratings yet
- TOSDocument27 pagesTOSMuhammad Ariff Bin Baharudin100% (1)
- Supermicro Utility User Guide IPMICFGDocument21 pagesSupermicro Utility User Guide IPMICFGDjaelani DhianNo ratings yet
- PSDB - CL (2) - IO Family Data BookDocument18 pagesPSDB - CL (2) - IO Family Data BookPups Bodhisattva DasNo ratings yet
- Debugging Techniques: 4/24/2012 1 Embedded System Design - IiDocument32 pagesDebugging Techniques: 4/24/2012 1 Embedded System Design - IiCyril LeoNo ratings yet
- Winavr Avr GCCDocument40 pagesWinavr Avr GCCelfrichNo ratings yet
- 5-Void Pointers - DriversDocument24 pages5-Void Pointers - DriversEdson Pires da SilvaNo ratings yet
- 03 AVR ProgrammingDocument38 pages03 AVR ProgrammingPriscillaNo ratings yet
- Less MMMCDocument44 pagesLess MMMCÆshok IncreĐible KingNo ratings yet
- Lab Manual MES Experiment 2Document5 pagesLab Manual MES Experiment 2Kazi Al - KabidNo ratings yet
- Asociaciones y Organizaciones InternacionalesDocument32 pagesAsociaciones y Organizaciones InternacionalesJONATHANNo ratings yet
- DX DiagDocument21 pagesDX Diagstax9936No ratings yet
- Kuka Youbot Hardware Interfaces: Jan Paulus Bonn-Rhein-Sieg UniversityDocument36 pagesKuka Youbot Hardware Interfaces: Jan Paulus Bonn-Rhein-Sieg UniversityLuan MoraisNo ratings yet
- Nios II Processor Software Development LabDocument6 pagesNios II Processor Software Development LabLê Đình TiếnNo ratings yet
- Ios2 IntroductionDocument21 pagesIos2 IntroductionJoel David Delgado PerdomoNo ratings yet
- System Information ReportDocument34 pagesSystem Information ReportMaulana N. ArdianNo ratings yet
- Emu LogDocument30 pagesEmu Logluiz henriqueNo ratings yet
- Gyroscope LED Controller STM32F407 DiscoveryDocument21 pagesGyroscope LED Controller STM32F407 DiscoveryAndrei GeorgeNo ratings yet
- An Implementation of A FIR Filter On A GPU: Alexey Smirnov and Tzi-Cker ChiuehDocument8 pagesAn Implementation of A FIR Filter On A GPU: Alexey Smirnov and Tzi-Cker ChiuehVimala PriyaNo ratings yet
- CH3 - STM32 SoftwareprogrammingDocument15 pagesCH3 - STM32 Softwareprogramminghouda bouzekriNo ratings yet
- DxdiagDocument29 pagesDxdiagFlorim RamadaniNo ratings yet
- NETMF+for+STM32+-+Technical+Notes+Release+4 2Document5 pagesNETMF+for+STM32+-+Technical+Notes+Release+4 2vigneshwaranjNo ratings yet
- DX DiagDocument56 pagesDX Diagtimur.nikushinNo ratings yet
- System Information ReportDocument31 pagesSystem Information Reportjhosimar mNo ratings yet
- Encoder Profinet Prog PDFDocument46 pagesEncoder Profinet Prog PDFfox04No ratings yet
- Komputer Asus KutxtDocument55 pagesKomputer Asus KutxtTARKIM MUHADZDZIBNo ratings yet
- Analyzing Kernel Crash On Red HatDocument9 pagesAnalyzing Kernel Crash On Red Hatalexms10No ratings yet
- DxDiagDocument53 pagesDxDiagomarr5348No ratings yet
- Bringing UE3 to iPhone in 40 CharactersDocument88 pagesBringing UE3 to iPhone in 40 CharactersCarlos BacarraNo ratings yet
- Tutorials For STM32F103RB: Nicolas BarbotDocument13 pagesTutorials For STM32F103RB: Nicolas BarbotcarNo ratings yet
- Tut Nios2 Introduction (Assembler)Document23 pagesTut Nios2 Introduction (Assembler)David Arévalo JiménezNo ratings yet
- Update on filesystems for flash storageDocument55 pagesUpdate on filesystems for flash storageRahul CNo ratings yet
- JFFS2 File System ExplainedDocument6 pagesJFFS2 File System ExplainedRahul CNo ratings yet
- Fig - Interaction Between User App & V4L2 Driver: Source: VVDN TechnologiesDocument14 pagesFig - Interaction Between User App & V4L2 Driver: Source: VVDN TechnologiesRahul CNo ratings yet
- Fig - Interaction Between User App & V4L2 Driver: Source: VVDN TechnologiesDocument14 pagesFig - Interaction Between User App & V4L2 Driver: Source: VVDN TechnologiesRahul CNo ratings yet
- Padrón de Proveedores y Contratistas: Título Tabla CamposDocument138 pagesPadrón de Proveedores y Contratistas: Título Tabla CamposLuisNo ratings yet
- The Revision Parameters Acc. To MossopDocument2 pagesThe Revision Parameters Acc. To MossopPetkov YavorNo ratings yet
- UNIT 07 TV Activity WorksheetsDocument3 pagesUNIT 07 TV Activity WorksheetsClaudia ReynaudNo ratings yet
- MO008209 - v3 10 - Firmware UpgradeDocument89 pagesMO008209 - v3 10 - Firmware UpgradeAleksandar Sasa OtasevicNo ratings yet
- Bosch GST 75 E ProfessionalDocument167 pagesBosch GST 75 E ProfessionalAdriana AlvesNo ratings yet
- Miro - Selected Paintings Art Ebook PDFDocument104 pagesMiro - Selected Paintings Art Ebook PDFehandlinNo ratings yet
- Criteria For Judging Percentage Judge'S Scores: 5-Minute Jazz Chant PresentationDocument1 pageCriteria For Judging Percentage Judge'S Scores: 5-Minute Jazz Chant PresentationMichess AndingNo ratings yet
- CHAPTER 2-Method of Building EstimateDocument35 pagesCHAPTER 2-Method of Building EstimateSitam Suvam75% (4)
- Spesifikasi Ballast PhilipsDocument1 pageSpesifikasi Ballast PhilipsCharlesius LambertusNo ratings yet
- Blue Alley (Waterdeep Adventure) - Español PDFDocument17 pagesBlue Alley (Waterdeep Adventure) - Español PDFCristian Patricio Ramirez Tellez100% (2)
- Context Clues - Types Chart PDFDocument2 pagesContext Clues - Types Chart PDFAre Long IzzatNo ratings yet
- Doctor Who Piano BookDocument29 pagesDoctor Who Piano BookAn Moris100% (7)
- The Sound and The Fury Term PaperDocument26 pagesThe Sound and The Fury Term PaperPathik Bhatt100% (1)
- PembahsanDocument4 pagesPembahsanAi NyaaNo ratings yet
- Tutankhamun's Impact on Popular CultureDocument2 pagesTutankhamun's Impact on Popular Culturebwallace1997No ratings yet
- البحث العلمي والكمي PDFDocument60 pagesالبحث العلمي والكمي PDFtourkia hadfiNo ratings yet
- "I Love You": in Different LanguagesDocument10 pages"I Love You": in Different Languagescayla mae carlos100% (1)
- Florence Scovel Shinn Master Affirmations CollectionDocument15 pagesFlorence Scovel Shinn Master Affirmations CollectionNevillution97% (38)
- English Vernacular English Vernacular: Cement Brick Ladrilyo Cement Tiles Baldosa Closed Stringer Madre DE EskaleraDocument5 pagesEnglish Vernacular English Vernacular: Cement Brick Ladrilyo Cement Tiles Baldosa Closed Stringer Madre DE EskaleraJohn Nichole Hernandez DacanayNo ratings yet
- CTS Aptitude Exam-Verbal Section Paper4Document9 pagesCTS Aptitude Exam-Verbal Section Paper4Ronald RossNo ratings yet
- Exploring Residential Typologies of Historic Katra Dulo Neighborhood in AmritsarDocument11 pagesExploring Residential Typologies of Historic Katra Dulo Neighborhood in AmritsarAnkit KathiriyaNo ratings yet
- Extron® TouchLinkDocument78 pagesExtron® TouchLinkfaruk604No ratings yet
- List of Actors&ActressesDocument53 pagesList of Actors&Actressesvenkatehspydi10106081No ratings yet
- Choir WorkshopDocument2 pagesChoir Workshoplu1thinkNo ratings yet
- 2005 Cosgrove Art and MappingDocument1 page2005 Cosgrove Art and MappingjosefbolzNo ratings yet
- Indian Musical InstrumentsDocument7 pagesIndian Musical Instrumentsvaidehi shirsathNo ratings yet
- English Dictionary 150000Document2,515 pagesEnglish Dictionary 150000godthisisawful25% (4)
- Theories of The Archive From Across The DisciplinesDocument18 pagesTheories of The Archive From Across The DisciplinesFrancisca Andrea NaranjoNo ratings yet
- Nuno StyleDocument288 pagesNuno Stylemr.willianrj100% (6)
- Engprov2Document20 pagesEngprov2Ryan SeolNo ratings yet