You might also like
- eRDPML InsforUse PDFDocument116 pageseRDPML InsforUse PDFMario R. KallabNo ratings yet
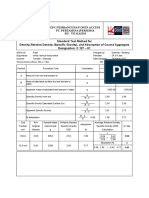
- Specific Gravity and Absorption of Rock For Erosion Control: Standard Test Method ForDocument4 pagesSpecific Gravity and Absorption of Rock For Erosion Control: Standard Test Method ForYarisel Shosha Muñoz100% (1)
- GenPhysLabs ENTotal2017Document82 pagesGenPhysLabs ENTotal2017HUY LÊ MINHNo ratings yet
- Spatial Mechanisms Lecture NotesDocument77 pagesSpatial Mechanisms Lecture NotesErico Eric100% (1)
- MSC Thesis Comparison and Analysis of Attitude Control Systems of A Satellite Using Reaction Wheel ActuatorsDocument117 pagesMSC Thesis Comparison and Analysis of Attitude Control Systems of A Satellite Using Reaction Wheel Actuatorsnab05No ratings yet
- ME Chapter 2Document1 pageME Chapter 2allovid50% (2)
- Assign 1Document2 pagesAssign 1Waleed Bin KhalidNo ratings yet
- Experiment 7 Determination of Specific Gravity Thru Buoyancy 1Document7 pagesExperiment 7 Determination of Specific Gravity Thru Buoyancy 1Vincent Allen B. CorbillaNo ratings yet
- Abstract. The Balancing of An Inverted Pendulum byDocument5 pagesAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaNo ratings yet
- Modeling An Inverted PendulumDocument45 pagesModeling An Inverted Pendulumjunaid_honey83896770% (1)
- Inverted PendulumDocument46 pagesInverted PendulumsalehknNo ratings yet
- Inverted PendulamDocument34 pagesInverted PendulamVi JayNo ratings yet
- A Motion ControlDocument6 pagesA Motion ControlRonald CaravacaNo ratings yet
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 pagesDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarNo ratings yet
- Modeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkDocument5 pagesModeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkMario CavazosNo ratings yet
- Inverted PendulumDocument4 pagesInverted PendulumFerbNo ratings yet
- 03 LagrangianDynamics 1Document28 pages03 LagrangianDynamics 1Terence DengNo ratings yet
- Total NotesDocument442 pagesTotal NotesArmando MaloneNo ratings yet
- Hw2sol PDFDocument5 pagesHw2sol PDFShy PeachD100% (1)
- Self-Balancing Robot: Clint Ferrin, Dana Sorensen, Cameron Frandsen December 15, 2016Document39 pagesSelf-Balancing Robot: Clint Ferrin, Dana Sorensen, Cameron Frandsen December 15, 2016Fatima BaigNo ratings yet
- Modeling and Position Control of Mobile RobotDocument6 pagesModeling and Position Control of Mobile RobotAmin EslamiNo ratings yet
- 1978 - Stable Adaptive Controller Design-Direct Control (Narendra)Document14 pages1978 - Stable Adaptive Controller Design-Direct Control (Narendra)ademargcjuniorNo ratings yet
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- Chapter 6 1Document26 pagesChapter 6 1Nyein Aye MyatNo ratings yet
- Stair Climbing Wheel ChairDocument4 pagesStair Climbing Wheel ChairMukesh Khairnar0% (1)
- Model Predictive Control For UAVsDocument24 pagesModel Predictive Control For UAVsJulio BVNo ratings yet
- Classical 093Document33 pagesClassical 093Julian David Henao EscobarNo ratings yet
- Robo3 2Document336 pagesRobo3 2Debabrata PaulNo ratings yet
- LabVIEW Control Implementation TutorialDocument21 pagesLabVIEW Control Implementation TutorialDTNo ratings yet
- Robotics: Dynamic Model of ManipulatorsDocument20 pagesRobotics: Dynamic Model of ManipulatorsbalkyderNo ratings yet
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason ANo ratings yet
- Lec8 Inverse KinematicsDocument32 pagesLec8 Inverse KinematicsbalkyderNo ratings yet
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterNo ratings yet
- Modeling and Control of 2-DOF Robot Arm: November 2018Document9 pagesModeling and Control of 2-DOF Robot Arm: November 2018Lavinia CuldaNo ratings yet
- DESIGN OF MACHINERY - Problem 4-18gDocument2 pagesDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraNo ratings yet
- Modeling and Control of An Acrobot Using MATLAB and SimulinkDocument4 pagesModeling and Control of An Acrobot Using MATLAB and SimulinkridhoNo ratings yet
- Tutorial of The Bond GraphDocument22 pagesTutorial of The Bond Graphsf111No ratings yet
- Direct KinematicsDocument66 pagesDirect KinematicsMateen Qadri100% (2)
- The Cart With An Inverted PendulumDocument5 pagesThe Cart With An Inverted PendulumvlrsenthilNo ratings yet
- FLC&NN Control of DC MotorDocument37 pagesFLC&NN Control of DC MotorR.SRIKANTHNo ratings yet
- Jacobi AnDocument34 pagesJacobi Anfitri puji rahayuNo ratings yet
- D-H Problems PDFDocument9 pagesD-H Problems PDFkrupachariNo ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Inverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyDocument6 pagesInverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyWan Nizam Wan SulaimanNo ratings yet
- DynamicsDocument31 pagesDynamicsNagamani RajeshNo ratings yet
- Quadruped Walking Running SimulationDocument49 pagesQuadruped Walking Running SimulationbilynbkNo ratings yet
- Stabilization Methods For Simulations of Constrained Multibody DynamicsDocument179 pagesStabilization Methods For Simulations of Constrained Multibody DynamicsMinseong Kim100% (1)
- Dynamic Analysis of 3-3 Stewart PlatformDocument16 pagesDynamic Analysis of 3-3 Stewart PlatformehsanNo ratings yet
- Mathematical Model of Inverted Pendulum SystemDocument18 pagesMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- Inverted PendulumDocument10 pagesInverted PendulumLubeck Abraham Huaman PonceNo ratings yet
- Robotics CH 4 Robot DynamicsDocument40 pagesRobotics CH 4 Robot DynamicsCharlette Alessi InaoNo ratings yet
- Simscape Fluids Exercise 2018 ADocument15 pagesSimscape Fluids Exercise 2018 AElias BerbettyNo ratings yet
- A Sliding Mode Control For Robot ManipulatorDocument27 pagesA Sliding Mode Control For Robot ManipulatorauraliusNo ratings yet
- Lab 3Document7 pagesLab 3jisteeleNo ratings yet
- FFR125 LectureNotesDocument122 pagesFFR125 LectureNotesshivaprasadmvit100% (1)
- Advance Control SystemDocument3 pagesAdvance Control Systemcoep05100% (1)
- Denavit Hartenberg ConventionDocument17 pagesDenavit Hartenberg Conventionshobri49No ratings yet
- Inverse Kinematics PPT (Pak Toni)Document14 pagesInverse Kinematics PPT (Pak Toni)herawanadifNo ratings yet
- Lec9 Velocity KinematicsDocument30 pagesLec9 Velocity KinematicsbalkyderNo ratings yet
- Inverted Pendulum CartDocument64 pagesInverted Pendulum CartTushar SanwareyNo ratings yet
- Chapter 17 PDFDocument10 pagesChapter 17 PDFChirilicoNo ratings yet
- Rotary Inverted Pendulum: ME 452 Course Project IIDocument25 pagesRotary Inverted Pendulum: ME 452 Course Project IIMohammed BenbrahimNo ratings yet
- Adaptive Control PDFDocument380 pagesAdaptive Control PDFSanjiv CrNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Stability of Linear Systems: Some Aspects of Kinematic SimilarityFrom EverandStability of Linear Systems: Some Aspects of Kinematic SimilarityNo ratings yet
- Tec45 KRDocument19 pagesTec45 KRMario R. KallabNo ratings yet
- Ultrasonic Flow Meter-Saudi FalDocument19 pagesUltrasonic Flow Meter-Saudi FalMario R. KallabNo ratings yet
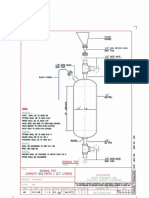
- VEOLIA 20 LT Dosing PotDocument1 pageVEOLIA 20 LT Dosing PotMario R. KallabNo ratings yet
- Eceived: Nesma & Partners D CDocument1 pageEceived: Nesma & Partners D CMario R. KallabNo ratings yet
- Equipment Solution 4Document1 pageEquipment Solution 4Mario R. KallabNo ratings yet
- FBE Installation Manual PDFDocument60 pagesFBE Installation Manual PDFMario R. KallabNo ratings yet
- Equipment Solution 3Document1 pageEquipment Solution 3Mario R. KallabNo ratings yet
- MEP Civil Clearance 15-July-2017Document4 pagesMEP Civil Clearance 15-July-2017Mario R. KallabNo ratings yet
- Equipment Solution 2Document1 pageEquipment Solution 2Mario R. KallabNo ratings yet
- Exam 3 - Standard and Procedures - SolutionDocument2 pagesExam 3 - Standard and Procedures - SolutionMario R. KallabNo ratings yet
- Equipment Solution 1Document1 pageEquipment Solution 1Mario R. KallabNo ratings yet
- Exam 4 - Standard and Procedures - SolutionDocument2 pagesExam 4 - Standard and Procedures - SolutionMario R. KallabNo ratings yet
- Exam 2 - Standard and Procedures - SolutionDocument2 pagesExam 2 - Standard and Procedures - SolutionMario R. KallabNo ratings yet
- HIIT Workout - Cutting Phase: General Warm-up/Flexibility RoutineDocument5 pagesHIIT Workout - Cutting Phase: General Warm-up/Flexibility RoutineMario R. Kallab100% (1)
- 2016 EFR CFC Inst Guide Errata BJBS Final13Dec2016Document4 pages2016 EFR CFC Inst Guide Errata BJBS Final13Dec2016Mario R. KallabNo ratings yet
- Writing About Survey Results - Answers PDFDocument1 pageWriting About Survey Results - Answers PDFMario R. KallabNo ratings yet
- Curriculum MenuDocument1 pageCurriculum MenuMario R. KallabNo ratings yet
- 2016 EFR CPRAED Inst Guide Errata13Dec2016Document5 pages2016 EFR CPRAED Inst Guide Errata13Dec2016Mario R. KallabNo ratings yet
- Writing About Survey Results - Writing PracticeDocument1 pageWriting About Survey Results - Writing PracticeMario R. KallabNo ratings yet
- Kinetic and Potential EnergyDocument3 pagesKinetic and Potential EnergyTAE0% (1)
- Astrodynamic ConstantsDocument2 pagesAstrodynamic ConstantslukeliosNo ratings yet
- Phy022 PS1 PDFDocument7 pagesPhy022 PS1 PDFHaron BusranNo ratings yet
- Mass-Energy EquivalenceDocument25 pagesMass-Energy EquivalenceSohail KhanNo ratings yet
- Anthropometric Study of The Forearm and HandDocument6 pagesAnthropometric Study of The Forearm and HandAna Mary GCNo ratings yet
- Physics 71 - 1syllabus 1stsem15-16Document3 pagesPhysics 71 - 1syllabus 1stsem15-16Ying YangNo ratings yet
- Kinetic and Potential Energy of Motion - Lesson - TeachEngineeringDocument5 pagesKinetic and Potential Energy of Motion - Lesson - TeachEngineeringhendry suhardimanNo ratings yet
- Iso 9096Document13 pagesIso 9096Hairul SaprudinNo ratings yet
- Modul 1 Form 5Document5 pagesModul 1 Form 5Nurul Afida TahirNo ratings yet
- MP 06Document2 pagesMP 06l Faris lNo ratings yet
- Electrons Are Much Smaller Than Protons or NeutronsDocument4 pagesElectrons Are Much Smaller Than Protons or NeutronsLara Michelle Sanday BinudinNo ratings yet
- Center of Mass, LM, CollisionsDocument11 pagesCenter of Mass, LM, CollisionsChinmay MandaveNo ratings yet
- Unit 01 - Measurements and UnitsDocument49 pagesUnit 01 - Measurements and UnitsvedikaNo ratings yet
- ASTM C 27 Berat Jenis KerikilDocument1 pageASTM C 27 Berat Jenis KerikilBengkulu BetonNo ratings yet
- The Everyday 12-Point Lifesaver: by David CameronDocument34 pagesThe Everyday 12-Point Lifesaver: by David CameronPav AujlaNo ratings yet
- Converting Metric Units To English UnitsDocument14 pagesConverting Metric Units To English Unitsliezel nosnosanNo ratings yet
- Gravitation Updated WorksheetDocument4 pagesGravitation Updated WorksheetChandni VaishnavNo ratings yet
- Summative Test 1.1 Laws of MotionDocument1 pageSummative Test 1.1 Laws of MotionXHiri Pabuaya MendozaNo ratings yet
- Physics For Future Presidents LectureDocument41 pagesPhysics For Future Presidents LectureJohn CrawfordNo ratings yet
- Electric FieldsDocument4 pagesElectric FieldsAhsan MalikNo ratings yet
- Curvy Things: Year 12 Physics Unit 6Document8 pagesCurvy Things: Year 12 Physics Unit 6api-505203040No ratings yet
- Force Lecture NotesDocument53 pagesForce Lecture NoteskiranphdNo ratings yet
- Assignment P-11-09: Problem 7. Problem 8. Problem 9Document4 pagesAssignment P-11-09: Problem 7. Problem 8. Problem 9Jijo SagaiNo ratings yet
- Science Form One - Introduction To ScienceDocument10 pagesScience Form One - Introduction To Scienceamyryuzaini100% (1)