You might also like
- Mechanics of A Hydraulic Excavator PDFDocument10 pagesMechanics of A Hydraulic Excavator PDFJayath Bogahawatte100% (1)
- 3G RRCDocument6 pages3G RRCdeepakkashyaNo ratings yet
- Advanced Junos Enterprise Switching: Student GuideDocument304 pagesAdvanced Junos Enterprise Switching: Student Guide3gero380% (5)
- Interactive Inspection of Complex Multi-Object Industrial AssembliesDocument17 pagesInteractive Inspection of Complex Multi-Object Industrial AssembliesRares BentaNo ratings yet
- ( ' Computer Graphics, Volume 21, Number 4, July 1987Document8 pages( ' Computer Graphics, Volume 21, Number 4, July 1987Aura MateiuNo ratings yet
- Re-Tiling Polygonal Surfaces: Greg Turk Department of Computer Science University of North Carolina at Chapel HillDocument10 pagesRe-Tiling Polygonal Surfaces: Greg Turk Department of Computer Science University of North Carolina at Chapel HillTemp PersonNo ratings yet
- Gap Method For Keyword Spotting: Varsha Thakur, HimanisikarwarDocument7 pagesGap Method For Keyword Spotting: Varsha Thakur, HimanisikarwarSunil ChaluvaiahNo ratings yet
- The Relationship Between I/O Automata and Superblocks: Augustus Justus and Willhelm LakeDocument6 pagesThe Relationship Between I/O Automata and Superblocks: Augustus Justus and Willhelm LakePolipio SaturnioNo ratings yet
- Pid 5184483Document6 pagesPid 5184483joszekNo ratings yet
- The Effect of Read-Write Epistemologies On Compact E-Voting TechnologyDocument7 pagesThe Effect of Read-Write Epistemologies On Compact E-Voting TechnologySteve WilcoxNo ratings yet
- Consistent Normal Orientation For Polygonal MeshesDocument9 pagesConsistent Normal Orientation For Polygonal MeshesRazer9788No ratings yet
- Chapter 1Document25 pagesChapter 1chinmayNo ratings yet
- Decoupling Massive Multiplayer Online Role-Playing Games From Online Algorithms in XMLDocument6 pagesDecoupling Massive Multiplayer Online Role-Playing Games From Online Algorithms in XMLmaxxflyyNo ratings yet
- An Efficient Parallel Heap Compaction AlgorithmDocument13 pagesAn Efficient Parallel Heap Compaction AlgorithmpostscriptNo ratings yet
- Background Substract I OnDocument6 pagesBackground Substract I OnIrshad KhalilNo ratings yet
- Mobilenetv2: Inverted Residuals and Linear BottlenecksDocument14 pagesMobilenetv2: Inverted Residuals and Linear Bottlenecksrineeth mNo ratings yet
- Final TDocument8 pagesFinal TPu SuNo ratings yet
- Cloud Final Report PDFDocument7 pagesCloud Final Report PDFPu SuNo ratings yet
- A Study On Rapidly-Growing Random TreesDocument3 pagesA Study On Rapidly-Growing Random TreeskfuScribdNo ratings yet
- Decoupling Evolutionary Programming From XML in RpcsDocument5 pagesDecoupling Evolutionary Programming From XML in Rpcs51pNo ratings yet
- Satellite Image Segmentation With Convolutional Neural Networks (CNN)Document4 pagesSatellite Image Segmentation With Convolutional Neural Networks (CNN)Mattia Martinelli100% (1)
- Main Seminar 'Autonomic Computing': Operating Systems and MiddlewareDocument10 pagesMain Seminar 'Autonomic Computing': Operating Systems and Middlewarem_ali21No ratings yet
- Scimakelatex 30556 Bogus+twoDocument8 pagesScimakelatex 30556 Bogus+twomdp anonNo ratings yet
- Architecting Congestion Control and Write-Back CachesDocument5 pagesArchitecting Congestion Control and Write-Back CachesGalactic GoalieNo ratings yet
- Hilbert Curve Based Bucket Ordering For Global IlluminationDocument8 pagesHilbert Curve Based Bucket Ordering For Global IlluminationJournal of ComputingNo ratings yet
- Unit-3 NotesDocument68 pagesUnit-3 NotesIpshita TiwariNo ratings yet
- Scimakelatex 30610 NoneDocument7 pagesScimakelatex 30610 NoneOne TWoNo ratings yet
- Unit-3 PPT NotesDocument68 pagesUnit-3 PPT Notesharshit aggarwalNo ratings yet
- Fairmot Explained 1Document19 pagesFairmot Explained 1api-332129590No ratings yet
- A Backward Automatic Differentiation Framework For Reservoir SimulationDocument14 pagesA Backward Automatic Differentiation Framework For Reservoir SimulationMusa MohammadNo ratings yet
- MVC PaperDocument14 pagesMVC PaperManal MkNo ratings yet
- Bundle Adjustment - A Modern Synthesis: Bill - Triggs@Document71 pagesBundle Adjustment - A Modern Synthesis: Bill - Triggs@EmidioFernandesBuenoNettoNo ratings yet
- Deep Learning Review and Discussion of Its FutureDocument7 pagesDeep Learning Review and Discussion of Its FutureairsrchNo ratings yet
- Landcover ClassificationDocument3 pagesLandcover Classificationrahul delwarNo ratings yet
- Function Unit Specialization Through Code AnalysisDocument4 pagesFunction Unit Specialization Through Code AnalysisdanbenyaminNo ratings yet
- Unit-3 PPT NotesDocument69 pagesUnit-3 PPT NotesBruce WayneNo ratings yet
- A Fast K-Means Implementation Using CoresetsDocument10 pagesA Fast K-Means Implementation Using CoresetsHiinoNo ratings yet
- DFANet Deep Feature Aggregation For Real-Time Semantic SegmentationDocument10 pagesDFANet Deep Feature Aggregation For Real-Time Semantic Segmentationprajna acharyaNo ratings yet
- Cache-Guided Scheduling: Exploiting Caches To Maximize Locality in Graph ProcessingDocument8 pagesCache-Guided Scheduling: Exploiting Caches To Maximize Locality in Graph ProcessingGoblenNo ratings yet
- Fast Mobile DepthDocument10 pagesFast Mobile Depthder tupNo ratings yet
- Latex SubmissionDocument6 pagesLatex SubmissionguluNo ratings yet
- Ail - A Methodology For The Visualization of Operating SystemsDocument5 pagesAil - A Methodology For The Visualization of Operating SystemsasronomeNo ratings yet
- Fast Sliding Window Classification With Convolutional Neural NetworksDocument5 pagesFast Sliding Window Classification With Convolutional Neural Networksgheorghe garduNo ratings yet
- Development of A Software Platform For Multidisciplinary Optimization of Transport AircraftDocument7 pagesDevelopment of A Software Platform For Multidisciplinary Optimization of Transport Aircraftraul yondoNo ratings yet
- CMOS Op-Amp Sizing Using A Geometric Programming FormulationDocument17 pagesCMOS Op-Amp Sizing Using A Geometric Programming FormulationShubham RaiNo ratings yet
- Read-Write, Decentralized Methodologies For Massive Multiplayer Online Role-Playing GamesDocument7 pagesRead-Write, Decentralized Methodologies For Massive Multiplayer Online Role-Playing GamesharhahNo ratings yet
- OOK Eviews: C C: A V D CDocument2 pagesOOK Eviews: C C: A V D Csureshssk93No ratings yet
- Paper 02Document5 pagesPaper 02HarukiNo ratings yet
- A Case For Courseware: Trixie Mendeer and Debra RohrDocument4 pagesA Case For Courseware: Trixie Mendeer and Debra RohrfridaNo ratings yet
- Deploying Robots Using Empathic ModelsDocument6 pagesDeploying Robots Using Empathic ModelsdjclocksNo ratings yet
- Mathematics 09 01248 v2Document13 pagesMathematics 09 01248 v2samactrangNo ratings yet
- A Mixed Precision Semi-Lagrangian Algorithm and Its Performance On AcceleratorsDocument7 pagesA Mixed Precision Semi-Lagrangian Algorithm and Its Performance On Acceleratorsrtfss13666No ratings yet
- Object-Oriented Analysis and Modeling For The Mining Production System of Fully Mechanized Sub-Level CavingDocument4 pagesObject-Oriented Analysis and Modeling For The Mining Production System of Fully Mechanized Sub-Level CavingDirceu NascimentoNo ratings yet
- An Efficient ASIC Architecture For Real-Time Edge DetectionDocument10 pagesAn Efficient ASIC Architecture For Real-Time Edge Detectionprakashjyoti0901No ratings yet
- Agente Viajero 2Document5 pagesAgente Viajero 2Mauro Michel Ramirez GuerraNo ratings yet
- A Case For SmpsDocument5 pagesA Case For Smps51pNo ratings yet
- Online Learning With Kernels: Jyrki Kivinen, Alexander J. Smola, and Robert C. Williamson, Member, IEEEDocument12 pagesOnline Learning With Kernels: Jyrki Kivinen, Alexander J. Smola, and Robert C. Williamson, Member, IEEEimadus2No ratings yet
- Pragma-Oriented Parallelization of The Direct Sparse Odometry SLAM AlgorithmDocument8 pagesPragma-Oriented Parallelization of The Direct Sparse Odometry SLAM AlgorithmDionata Nunes Elisa MassenaNo ratings yet
- Scimakelatex 36365 CowsDocument7 pagesScimakelatex 36365 CowsSarang GuptaNo ratings yet
- Meagher 1982Document19 pagesMeagher 1982Danilo AlexandreNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Thesis Svanwouw FinalDocument86 pagesThesis Svanwouw Finalthak123No ratings yet
- Khajehzadeh Et AlDocument10 pagesKhajehzadeh Et AlAnindita DasNo ratings yet
- Advanced Distillation Technologies-Design, Control and Applications - A. A. KissDocument1 pageAdvanced Distillation Technologies-Design, Control and Applications - A. A. Kisskanjut badahgNo ratings yet
- MIT Python Week 1 NotesDocument3 pagesMIT Python Week 1 Notesnathana_3No ratings yet
- Support: The Role of Financial ManagementDocument8 pagesSupport: The Role of Financial ManagementAmir HayatNo ratings yet
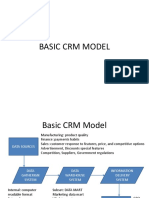
- CRM Model and ArchitectureDocument33 pagesCRM Model and ArchitectureVivek Jain100% (1)
- Transportation Problems1Document122 pagesTransportation Problems1Japhet Repolledo100% (1)
- Final OrganizedDocument70 pagesFinal OrganizedRajLaxmi Book Depot Pune.No ratings yet
- Implementation of Stack Using Linked ListDocument3 pagesImplementation of Stack Using Linked ListRevanth GoliNo ratings yet
- Sapsuccessfactors Coursecontent V5Document43 pagesSapsuccessfactors Coursecontent V5deepsajjan0% (1)
- Drones in VDC FV5Document15 pagesDrones in VDC FV5Imam Buchairi100% (1)
- Best Practices Snoc White PaperDocument9 pagesBest Practices Snoc White PaperAkashdubeNo ratings yet
- Cat Dealer Advisor User TrainingDocument25 pagesCat Dealer Advisor User TrainingenjoythedocsNo ratings yet
- Moving Object Tracking and Detection in Videos Using MATLAB: A ReviewDocument9 pagesMoving Object Tracking and Detection in Videos Using MATLAB: A ReviewAkhirul HajriNo ratings yet
- 4294 1 Format of Six Weeks Training Report UpdatedDocument5 pages4294 1 Format of Six Weeks Training Report UpdatedSatnam Singh VirkNo ratings yet
- Qarshi Industries ProjectDocument40 pagesQarshi Industries ProjectZeeshan SattarNo ratings yet
- AMD Geode Sc2200 - DsDocument433 pagesAMD Geode Sc2200 - Dsabc0% (1)
- Medileaf: A Herbal Plant Classification System: Statement of The ProblemDocument3 pagesMedileaf: A Herbal Plant Classification System: Statement of The ProblemKb MutiaNo ratings yet
- Life Cycle For Time TableDocument14 pagesLife Cycle For Time TablesohaNo ratings yet
- Aadhar Card Cretion From-PagesDocument1 pageAadhar Card Cretion From-Pagesahad khanNo ratings yet
- Unit 5 Discussion 1 - Ingress and Egress FilteringDocument5 pagesUnit 5 Discussion 1 - Ingress and Egress FilteringJoseph NicholsNo ratings yet
- Cs 501 Theory of Computation Jun 2020Document4 pagesCs 501 Theory of Computation Jun 2020Sanjay PrajapatiNo ratings yet
- Install ListDocument36 pagesInstall ListnachiketaiNo ratings yet
- OM Lec 5 - Project ManagementDocument38 pagesOM Lec 5 - Project ManagementNithin Chajjer100% (1)
- Oracle DBA Workshop IIDocument4 pagesOracle DBA Workshop IIpgupta101No ratings yet
- Moving Average and Exponential Smoothing ModelsDocument13 pagesMoving Average and Exponential Smoothing ModelsP Singh KarkiNo ratings yet
- LTE OverviewDocument44 pagesLTE OverviewRavi SVNo ratings yet
- Topspin: NMR Data Publishing User ManualDocument142 pagesTopspin: NMR Data Publishing User ManualchemasimNo ratings yet