You might also like
- Moog ServoDrives RMC - T161 - CAN - Profile Manual enDocument104 pagesMoog ServoDrives RMC - T161 - CAN - Profile Manual enJorge Sarmiento100% (1)
- Steel W Orks Products (Thailand) : Elevator Controller SystemDocument4 pagesSteel W Orks Products (Thailand) : Elevator Controller Systemtran xobonNo ratings yet
- Moog ServoDrives RMC - T161 - CAN - Interpol Manual enDocument104 pagesMoog ServoDrives RMC - T161 - CAN - Interpol Manual enJorge SarmientoNo ratings yet
- 7 MF 1570Document14 pages7 MF 1570Jose MarticorenaNo ratings yet
- Operator FAAC C850 Users ManualDocument8 pagesOperator FAAC C850 Users Manualraza514No ratings yet
- Moog-ServoDrives-RMC T161 Operating Instructions en 10VDocument112 pagesMoog-ServoDrives-RMC T161 Operating Instructions en 10VJorge SarmientoNo ratings yet
- JEMStar Application NotesDocument26 pagesJEMStar Application NotesMovieTube DBNo ratings yet
- Cassetteflyer 2011 enDocument3 pagesCassetteflyer 2011 enHEMANTH P ANo ratings yet
- 2002 Cigre Tenbohlen PDFDocument8 pages2002 Cigre Tenbohlen PDFMahlomola MasenkaneNo ratings yet
- 2002 Cigre Tenbohlen PDFDocument8 pages2002 Cigre Tenbohlen PDFMahlomola MasenkaneNo ratings yet
- Sicam Sat 1703 Acp - RtuDocument12 pagesSicam Sat 1703 Acp - RtuSergey PavlovNo ratings yet
- Sicam Sat 1703 Acp - RtuDocument12 pagesSicam Sat 1703 Acp - RtuSergey PavlovNo ratings yet
- Sicam Sat 1703 Acp Rtu PDFDocument12 pagesSicam Sat 1703 Acp Rtu PDFRICARDONo ratings yet
- Sicam Sat 1703 Acp - Rtu PDFDocument12 pagesSicam Sat 1703 Acp - Rtu PDFtdusko100% (2)
- Sicam Sat 1703 Acp - RtuDocument12 pagesSicam Sat 1703 Acp - RtutduskoNo ratings yet
- MA05-10 SeriesDocument4 pagesMA05-10 SeriesMark XavierNo ratings yet
- pdf1Document9 pagespdf1Hưng Khổng HoàiNo ratings yet
- Process Monitoring of Hydro Turbine VibrationsDocument8 pagesProcess Monitoring of Hydro Turbine VibrationsreddyloginNo ratings yet
- MTE Line Reactor For Harmonics AvoidanceDocument6 pagesMTE Line Reactor For Harmonics AvoidancemaheshrsaNo ratings yet
- Hexa Series - Schneider ElectricDocument8 pagesHexa Series - Schneider ElectricSpardha GuptaNo ratings yet
- Low Z Differential Relay Protection SettingsDocument7 pagesLow Z Differential Relay Protection SettingsharrisvasNo ratings yet
- Huawei TMA SupportDocument33 pagesHuawei TMA SupportSathorn TumNo ratings yet
- Implementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeDocument23 pagesImplementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeMos CraciunNo ratings yet
- Energy Meter ManualDocument11 pagesEnergy Meter ManualoespanaNo ratings yet
- DTC SVMDocument22 pagesDTC SVMxeta123No ratings yet
- FOC Algorithm For PMSM PDFDocument8 pagesFOC Algorithm For PMSM PDFMoussa SedraouiNo ratings yet
- General Characteristics: 16V2000G65E G3Document5 pagesGeneral Characteristics: 16V2000G65E G3cafubodoNo ratings yet
- 9.quadrature Compensation For GyroscopesDocument4 pages9.quadrature Compensation For GyroscopesTechno GamingNo ratings yet
- Reliability Analysis of Aircraft Starter Generator Drive ConverterDocument6 pagesReliability Analysis of Aircraft Starter Generator Drive Convertersezgin bayramNo ratings yet
- The Green Bank Telescope Active Surface SystemDocument10 pagesThe Green Bank Telescope Active Surface SystemWharton LaelandeNo ratings yet
- Manual: Easyaccess2.0 Startup GuideDocument54 pagesManual: Easyaccess2.0 Startup GuideÁnh VũNo ratings yet
- Ijisa V6 N4 3 PDFDocument14 pagesIjisa V6 N4 3 PDFaliNo ratings yet
- Ecm 0555 080 0701 F: Motohawk Control SolutionsDocument15 pagesEcm 0555 080 0701 F: Motohawk Control SolutionsgtrhjNo ratings yet
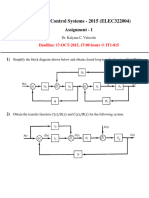
- acs_2015s2_assn1Document5 pagesacs_2015s2_assn1MiraelNo ratings yet
- 2013 A Simple Carrier-Based Modulation For The SVM of The Matrix ConverterDocument10 pages2013 A Simple Carrier-Based Modulation For The SVM of The Matrix ConverterTran Quoc HoanNo ratings yet
- Markvi OverviewDocument20 pagesMarkvi OverviewIkhtiander IkhtianderNo ratings yet
- Fault Tolerant Control With Torque Limitation Based On Fault Mode For Ten Phase Permanent Magnet Synchronous MotorDocument12 pagesFault Tolerant Control With Torque Limitation Based On Fault Mode For Ten Phase Permanent Magnet Synchronous MotorAbir HezziNo ratings yet
- A Robust Adaptive Fuzzy Fast Terminal Synergetic Voltage Control Scheme For DC DC Buck ConverterDocument5 pagesA Robust Adaptive Fuzzy Fast Terminal Synergetic Voltage Control Scheme For DC DC Buck ConverterhoussinenechmaNo ratings yet
- Ae-Mae R: Contactorless (STO) Integrated Lift ControllerDocument8 pagesAe-Mae R: Contactorless (STO) Integrated Lift Controllerاحمد ابو جاسرNo ratings yet
- RL Line/Load Reactors: Driving Power QualityDocument6 pagesRL Line/Load Reactors: Driving Power Qualityjorapa7No ratings yet
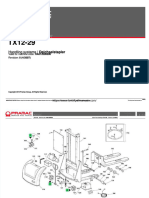
- Pramac TX12-29 Stacker Spare Parts Catalog PDFDocument12 pagesPramac TX12-29 Stacker Spare Parts Catalog PDFHector Luis Parra GonzalezNo ratings yet
- New Transmission Control System For Bulldozers: Sa E Technical Paper SeriesDocument11 pagesNew Transmission Control System For Bulldozers: Sa E Technical Paper SeriesBluish FlameNo ratings yet
- Ethernet in Substation Automation Applications Issues and Requirements PDFDocument14 pagesEthernet in Substation Automation Applications Issues and Requirements PDFfiraol tekaNo ratings yet
- mPro-100-V2 Catalog (Standard)Document18 pagesmPro-100-V2 Catalog (Standard)bgbbNo ratings yet
- Tractor Three-Point Hitch Control System - Benifits of Electronic ControlDocument9 pagesTractor Three-Point Hitch Control System - Benifits of Electronic ControlMahmoudNo ratings yet
- Installation and Operating Instructions for MRT 97-M TotalizerDocument15 pagesInstallation and Operating Instructions for MRT 97-M TotalizerCesar Mora0% (1)
- ABB Review 2 2020 en 72 TruOne Zenith ArticleDocument4 pagesABB Review 2 2020 en 72 TruOne Zenith ArticlePrakash KandasamyNo ratings yet
- TeSys T Motor Management System Protection and Monitoring FunctionsDocument26 pagesTeSys T Motor Management System Protection and Monitoring FunctionsMaxwell VargasNo ratings yet
- Operator Guide: Mako 2 CTP, Mako 2X CTP, Mako 4 CTP, Mako 4X CTP, and Mako News CTPDocument72 pagesOperator Guide: Mako 2 CTP, Mako 2X CTP, Mako 4 CTP, Mako 4X CTP, and Mako News CTPjaviermarinNo ratings yet
- Concise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Document9 pagesConcise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Pablo Hidalgo ValenzuelaNo ratings yet
- IEEE Power System Paper-Overview of STATCOM TechnologiesDocument6 pagesIEEE Power System Paper-Overview of STATCOM TechnologiesAnoop MathewNo ratings yet
- Hvac Package e Module V1.40m3m+m1e - EngDocument25 pagesHvac Package e Module V1.40m3m+m1e - Engabdulyunus_amirNo ratings yet
- Aplicacion Variadores de Velocidad Fluke 289Document5 pagesAplicacion Variadores de Velocidad Fluke 289mci_ingNo ratings yet
- MV3000e AEMDocument4 pagesMV3000e AEMEvandro PavesiNo ratings yet
- Lift Trucks: MCFA Document # Issue DateDocument2 pagesLift Trucks: MCFA Document # Issue DateChristian BedoyaNo ratings yet
- m20s 1998Document364 pagesm20s 1998Tim MorganNo ratings yet
- Growatt Smart Meter SolutionDocument3 pagesGrowatt Smart Meter SolutionJamsher AliNo ratings yet
- Comparison of Speed Control of DC Servo Motor Using Pi, PID, Fuzzy, SMCDocument6 pagesComparison of Speed Control of DC Servo Motor Using Pi, PID, Fuzzy, SMCshubham kumarNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Ab Initio and Semiempirical MethodsDocument58 pagesAb Initio and Semiempirical MethodsElisha Niña75% (4)
- Tame Process BasicsDocument10 pagesTame Process BasicsD'Bayour Toke OsuolaleNo ratings yet
- Switchyard EquipmentsDocument6 pagesSwitchyard Equipmentsgaurang1111No ratings yet
- Carbondioxide in Water EquilibriumDocument7 pagesCarbondioxide in Water EquilibriumsaaroomaniNo ratings yet
- Oxygenerator User ManulDocument29 pagesOxygenerator User ManulRafikul RahemanNo ratings yet
- STD 8th Perfect General Science Notes English Medium MH BoardDocument15 pagesSTD 8th Perfect General Science Notes English Medium MH BoardvIShal Yadav0% (1)
- Safety Testing Oh Machines - IFADocument55 pagesSafety Testing Oh Machines - IFAMarco LoiaNo ratings yet
- KriyavatiDocument3 pagesKriyavatijaikamal123No ratings yet
- Manual Sanwa Dlc1000Document24 pagesManual Sanwa Dlc1000Arturo AlejandroNo ratings yet
- OMV Fact SheetDocument1 pageOMV Fact SheetKashif UmarNo ratings yet
- Eurosun2014-Proceedings - ImportentDocument1,524 pagesEurosun2014-Proceedings - ImportentAkhileshkumar PandeyNo ratings yet
- Alfred Webre - HAARP-Chemtrails - WMD - Exposing A Spiritual, Mass Mind-Control, and Planetary AssaultDocument63 pagesAlfred Webre - HAARP-Chemtrails - WMD - Exposing A Spiritual, Mass Mind-Control, and Planetary AssaultExopolitika Magyarország100% (1)
- SD6830 Instructions SD6830 Instructions: DescriptionDocument7 pagesSD6830 Instructions SD6830 Instructions: Descriptionxerox4512No ratings yet
- MSC ThesisDocument125 pagesMSC ThesisSangamithran Duraiswmay100% (1)
- Egt Margen From The Best ArticalDocument6 pagesEgt Margen From The Best ArticalakeelNo ratings yet
- Door Motor VVVFDocument15 pagesDoor Motor VVVFEdhimj UnmeNo ratings yet
- RYN-GREENSHIP Process N OverviewDocument61 pagesRYN-GREENSHIP Process N Overviewpolband mepNo ratings yet
- Parts Manual Parts Manual Parts Manual Parts Manual: Mfg. No: 10L902-0488-E1Document17 pagesParts Manual Parts Manual Parts Manual Parts Manual: Mfg. No: 10L902-0488-E1Chris LaPetersNo ratings yet
- Team Tec IncineratorDocument184 pagesTeam Tec IncineratorRobinson SoledadNo ratings yet
- Rural Star Solution: 28 Nov 2018 Huawei Technologies (Tanzania) Co., LTDDocument9 pagesRural Star Solution: 28 Nov 2018 Huawei Technologies (Tanzania) Co., LTDMax MbiseNo ratings yet
- Advanced Two Layer PolyethyleneDocument7 pagesAdvanced Two Layer PolyethylenemohdluthfiNo ratings yet
- Assignment No 2 PDFDocument14 pagesAssignment No 2 PDFMasood ArifNo ratings yet
- UEMB3244 Tutorial 3QDocument2 pagesUEMB3244 Tutorial 3QYee Kai TeeNo ratings yet
- RT Duroid 5870 5880 Data SheetDocument2 pagesRT Duroid 5870 5880 Data SheetKingslayer RennesNo ratings yet
- MotorsDocument31 pagesMotorsstraffor100% (1)
- Rheem Manufacturing Company (Singapore) Pte LTD: Project ReferencesDocument27 pagesRheem Manufacturing Company (Singapore) Pte LTD: Project ReferenceschinitnNo ratings yet
- Pmi ManDocument8 pagesPmi ManCalandrasReyCalandrasreyNo ratings yet
- Chapter - 14 Special SchemesDocument37 pagesChapter - 14 Special SchemesAmol JadhavNo ratings yet
- Trial Exam 2014 PT3 ScienceDocument9 pagesTrial Exam 2014 PT3 ScienceNor Shuhada100% (1)
- Incompressible Flow PDFDocument10 pagesIncompressible Flow PDFjprvader0% (1)