You might also like
- Virtual Class Room SystemDocument110 pagesVirtual Class Room SystemAbhimanyu mishraNo ratings yet
- Develop Android Application Traffic Management SystemDocument28 pagesDevelop Android Application Traffic Management Systemyash kaleNo ratings yet
- CG Report Draft FinalDocument22 pagesCG Report Draft FinalHarshitha H CNo ratings yet
- Online Feedback SystemDocument1 pageOnline Feedback SystemSonal DubeyNo ratings yet
- Online Exam: Project Using J2EEDocument27 pagesOnline Exam: Project Using J2EENADEEMNo ratings yet
- Two Components of User Interface (Hci)Document2 pagesTwo Components of User Interface (Hci)Idesarie SilladorNo ratings yet
- Automated Marksheet Generation SystemDocument2 pagesAutomated Marksheet Generation SystemSabaNo ratings yet
- Project1 ReportDocument31 pagesProject1 ReportAshis MohantyNo ratings yet
- KCS501 Solution2022 - 23Document25 pagesKCS501 Solution2022 - 23itsrishabh0703No ratings yet
- SDLC - Incremental Vs Evolutionary Software Development Process - NotepubDocument4 pagesSDLC - Incremental Vs Evolutionary Software Development Process - NotepubNote PubNo ratings yet
- Minor Project Report Format May 2011Document51 pagesMinor Project Report Format May 2011Anadi Sharma0% (1)
- MARKSHEET GENERATION SYSTEMDocument24 pagesMARKSHEET GENERATION SYSTEMVicky Kanojiya0% (1)
- Attendence Management SystemDocument78 pagesAttendence Management SystemSupernatural अद्भुत100% (1)
- Bus TicketDocument62 pagesBus Ticketmansha99No ratings yet
- Model Viva Questions For "Name of The Lab: VISUAL BASIC "Document9 pagesModel Viva Questions For "Name of The Lab: VISUAL BASIC "Surya Sooriya100% (1)
- Algorithm Psudo Code For Scheduling Algorithm PDFDocument7 pagesAlgorithm Psudo Code For Scheduling Algorithm PDFsankrajegowdaNo ratings yet
- AWT Viva Questions and Answer Mca Sem5Document11 pagesAWT Viva Questions and Answer Mca Sem5vinayakgar100% (1)
- Exam Management System - Power PointDocument12 pagesExam Management System - Power Pointkasoju sambaNo ratings yet
- E-Challan System: Information TechnologyDocument39 pagesE-Challan System: Information TechnologyKingsterz gamingNo ratings yet
- Online Learning Platforms MCA Siddharth KushDocument64 pagesOnline Learning Platforms MCA Siddharth KushShakya Ajit MauryaNo ratings yet
- Time Table Management System Project ReportDocument28 pagesTime Table Management System Project ReportSTALIN JABA KUMARNo ratings yet
- GINA Team Analytics Improve Innovation TrackingDocument9 pagesGINA Team Analytics Improve Innovation TrackingOmkar RajaleNo ratings yet
- Attendance AndroidDocument29 pagesAttendance Androidtanmay gawdeNo ratings yet
- OSY Notes Vol 1 - Ur Engineering FriendDocument68 pagesOSY Notes Vol 1 - Ur Engineering FriendSameer TembhareNo ratings yet
- LAN MessengerDocument57 pagesLAN MessengerMudit Dhawan100% (4)
- Unit-2 Domain Specific IotsDocument50 pagesUnit-2 Domain Specific IotsPadma 18-511No ratings yet
- Secure Cloud SimulationDocument9 pagesSecure Cloud SimulationS. LAVANYA100% (1)
- Heart Disease Prediction Using MLDocument38 pagesHeart Disease Prediction Using MLSahil SharmaNo ratings yet
- CSE TOPIC:- EXAMINATION MANAGEMENT SYSTEMDocument19 pagesCSE TOPIC:- EXAMINATION MANAGEMENT SYSTEMJaismeer Singh50% (4)
- CS Project File Shubham LagwalDocument15 pagesCS Project File Shubham LagwalDhruv Jain100% (1)
- Online Examination SystemDocument9 pagesOnline Examination SystemSusovan DuttaNo ratings yet
- Koneru Lakshmaiah Education Foundation Freshman Engineering DepartmentDocument20 pagesKoneru Lakshmaiah Education Foundation Freshman Engineering Departmentyaswanth ram100% (1)
- A Project Report On "Tic Tac Toe Game"Document13 pagesA Project Report On "Tic Tac Toe Game"Nitesh BhuraNo ratings yet
- Onlinecoursereservationsystem 170409170152Document34 pagesOnlinecoursereservationsystem 170409170152ume habibaNo ratings yet
- Intrusion Detection Using Pca With Random ForestDocument6 pagesIntrusion Detection Using Pca With Random ForestbhattajagdishNo ratings yet
- Online Notice Board: Project Report For Bachelor of Computer ApplicationDocument30 pagesOnline Notice Board: Project Report For Bachelor of Computer ApplicationAnUp KaSuLaNo ratings yet
- Cloud Computing Final ReportDocument29 pagesCloud Computing Final ReportKurumeti Naga Surya Lakshmana KumarNo ratings yet
- A Project Report ON "Retail Chain Management": Diploma IN Computer EngineeringDocument34 pagesA Project Report ON "Retail Chain Management": Diploma IN Computer EngineeringSai PrintersNo ratings yet
- MSc-IT Study Material Chapter on Alternative Life Cycle ModelsDocument5 pagesMSc-IT Study Material Chapter on Alternative Life Cycle ModelsCody YeungNo ratings yet
- Weather App Project ReportDocument32 pagesWeather App Project Reportbhanu.singhcs22No ratings yet
- Campus Assessment SystemDocument27 pagesCampus Assessment SystemManikandan SNo ratings yet
- CC 2nd Assignment AsnwersDocument18 pagesCC 2nd Assignment AsnwersMahesh ReddyNo ratings yet
- Curfew E Pass Management System Project ReportDocument24 pagesCurfew E Pass Management System Project ReportShivam ViradiyaNo ratings yet
- Online Railway Reservation System Project ReportDocument11 pagesOnline Railway Reservation System Project ReportSMNo ratings yet
- Assignment 1Document2 pagesAssignment 1arvi.sardarNo ratings yet
- Online Exam System Using Java (Swing) Without Using DatabaseDocument15 pagesOnline Exam System Using Java (Swing) Without Using DatabaseRed Light HackersNo ratings yet
- Student Report Card Management ReportDocument6 pagesStudent Report Card Management Report346 Dinesh Kashiwant CO21No ratings yet
- Bangalore House Price Prediction Using The Best Machine Learning Model Submitted by Rukzana Vadakkekudy Rassak P2682221Document9 pagesBangalore House Price Prediction Using The Best Machine Learning Model Submitted by Rukzana Vadakkekudy Rassak P2682221Adarsh PjNo ratings yet
- Movie Ticket BookingDocument29 pagesMovie Ticket BookingAslam BashaNo ratings yet
- Traffic Sign Classifier On AndroidDocument41 pagesTraffic Sign Classifier On AndroidChathuranga RathnayakeNo ratings yet
- Complete Contact Book SynopsisDocument25 pagesComplete Contact Book Synopsisvdreams13No ratings yet
- Minor Project PresentationDocument15 pagesMinor Project Presentationtradersindian4100% (1)
- Project - 06 - Advanced Java Programming Ver 1.0Document12 pagesProject - 06 - Advanced Java Programming Ver 1.0kapileswardoraNo ratings yet
- Online Attendance Management System ReportDocument58 pagesOnline Attendance Management System Reportsudip santraNo ratings yet
- Department Store Product Management GUIDocument65 pagesDepartment Store Product Management GUIvinay kumarNo ratings yet
- Project Synopsis For ChatbotDocument5 pagesProject Synopsis For ChatbotBibek BcNo ratings yet
- E Vaccination System Using AiDocument17 pagesE Vaccination System Using AiBRO.V͙A͙M͙S͙I͙ Ƥeͥ†eͣrͫ꧂No ratings yet
- Virtual Mouse Using Hand GesturesDocument15 pagesVirtual Mouse Using Hand Gesturessahil palNo ratings yet
- Network Management System A Complete Guide - 2020 EditionFrom EverandNetwork Management System A Complete Guide - 2020 EditionRating: 5 out of 5 stars5/5 (1)
- Client Server Architecture A Complete Guide - 2020 EditionFrom EverandClient Server Architecture A Complete Guide - 2020 EditionNo ratings yet
- 14ld44 Strip LightDocument2 pages14ld44 Strip Lighttsraj10No ratings yet
- Audio2Car harness allows aftermarket audio through OEM car speakersDocument2 pagesAudio2Car harness allows aftermarket audio through OEM car speakersEmilia Andrada DarsyNo ratings yet
- Multilin 469Document260 pagesMultilin 469darkelnoNo ratings yet
- CAT400 Report OutlineDocument3 pagesCAT400 Report OutlineEvo LutionNo ratings yet
- Product Sheet BS422 Multi-Tech Outdoor Base StationDocument4 pagesProduct Sheet BS422 Multi-Tech Outdoor Base StationmojoNo ratings yet
- Retrotec Fantestic Attma User Guide PDFDocument21 pagesRetrotec Fantestic Attma User Guide PDFt23No ratings yet
- Online Shopping ReportDocument64 pagesOnline Shopping Reportaryan singhNo ratings yet
- Asts Hitachi Wim Wild LRDocument5 pagesAsts Hitachi Wim Wild LRuamiranda3518No ratings yet
- 8086 MICROPROCESSOR LAB MANUALDocument14 pages8086 MICROPROCESSOR LAB MANUALhariNo ratings yet
- Curriculum Vitae Imran Land SurveyorDocument3 pagesCurriculum Vitae Imran Land SurveyorUmer AftabNo ratings yet
- Register File Using VHDLDocument15 pagesRegister File Using VHDLSumeet SauravNo ratings yet
- HP ProLiant ML310e Gen8 v2 ServerDocument4 pagesHP ProLiant ML310e Gen8 v2 ServerinyasiNo ratings yet
- CMS Software Release Notice CMS v3.7.1 - 22-Jan-2019Document2 pagesCMS Software Release Notice CMS v3.7.1 - 22-Jan-2019Anonymous 4KVQOT5jeHNo ratings yet
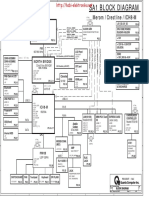
- SA1 BLOCK DIAGRAM shows Merom CPU and chipsetDocument42 pagesSA1 BLOCK DIAGRAM shows Merom CPU and chipsetMatias GuillenNo ratings yet
- RM Sivgx Fpga Dev BoardDocument84 pagesRM Sivgx Fpga Dev BoardjpginNo ratings yet
- Modicon Modernisation Guide - Quantum To X80 Evolution Cable Management Installation Kit, Jul'19 - MFR91487Document4 pagesModicon Modernisation Guide - Quantum To X80 Evolution Cable Management Installation Kit, Jul'19 - MFR91487Asim ButtNo ratings yet
- 29F400Document35 pages29F400AhmadNo ratings yet
- Toshiba CodesDocument5 pagesToshiba Codesbruxo70No ratings yet
- Allegro Platform System RequirementsDocument21 pagesAllegro Platform System RequirementsKarla RuizNo ratings yet
- MacAddict Sept 05: Home Entertainment, Mac Quiz, Intel On Macs, Automator Workflow, PSP, Mac Reviews, WWDC 2005Document75 pagesMacAddict Sept 05: Home Entertainment, Mac Quiz, Intel On Macs, Automator Workflow, PSP, Mac Reviews, WWDC 2005Mac|Life100% (2)
- Eco eDocument8 pagesEco eMarcelo Lima SouzaNo ratings yet
- UM8717 - 2740-2745 Digitizers User Manual Rev6Document60 pagesUM8717 - 2740-2745 Digitizers User Manual Rev6ernestoNo ratings yet
- Python TkinterDocument168 pagesPython TkinterAngelo Michael ClementeNo ratings yet
- GFK 2409 ADocument165 pagesGFK 2409 AEzz NadiNo ratings yet
- Liebert Ac4 User Manual PDFDocument89 pagesLiebert Ac4 User Manual PDFMohamedNo ratings yet
- Dictation, Vocabulary and Grammar: Brainchild Counterpart Decline Mainstream Mundane Prowess SwipeDocument2 pagesDictation, Vocabulary and Grammar: Brainchild Counterpart Decline Mainstream Mundane Prowess SwipeMarijaNo ratings yet
- Booking Cut Off 220120Document2,176 pagesBooking Cut Off 220120Fuji STfauziahNo ratings yet
- ST - ST62T00 PDFDocument3 pagesST - ST62T00 PDFVieira BrunoNo ratings yet
- Stress Test ECG DMS OriginalDocument32 pagesStress Test ECG DMS OriginalRay FNNo ratings yet
- 5.2.1.7 Lab - Viewing The Switch MAC Address TableDocument4 pages5.2.1.7 Lab - Viewing The Switch MAC Address TableMarc WallinNo ratings yet