You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Me Desires-Erotic PoetryDocument21 pagesMe Desires-Erotic PoetrygamahucherNo ratings yet
- NATO Intelligence Exploitation of The InternetDocument104 pagesNATO Intelligence Exploitation of The Internetmauro.pennacchietti100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Historic Struggle For Pakistan 1857 - 1947Document32 pagesHistoric Struggle For Pakistan 1857 - 1947The CSS Point82% (79)
- Hospital Ship Feasibility StudyDocument10 pagesHospital Ship Feasibility StudyRhona JhoyNo ratings yet
- Supply-ChainDocument61 pagesSupply-ChainJackson TeohNo ratings yet
- Myasthenia GravisDocument45 pagesMyasthenia GravisVirgilio Reyes ManuelNo ratings yet
- Huntington, The Hispanic Challenge PDFDocument17 pagesHuntington, The Hispanic Challenge PDFUguccionepisaNo ratings yet
- 1 Calimutan v. People - G.R. No. 152133Document1 page1 Calimutan v. People - G.R. No. 152133eiram23100% (1)
- List of Islamic Schools in Toronto To Apply For JobsDocument5 pagesList of Islamic Schools in Toronto To Apply For JobsgetsaifurNo ratings yet
- Spur Gear Design: MAE 342 - Dynamics of MachinesDocument15 pagesSpur Gear Design: MAE 342 - Dynamics of Machinesramu497No ratings yet
- Before 4pm, Friday, 2 August 2019) : Figure Q1Document3 pagesBefore 4pm, Friday, 2 August 2019) : Figure Q1Jackson TeohNo ratings yet
- Internal Forced Internal Forced Internal Forced Internal Forced Convection Convection Convection ConvectionDocument9 pagesInternal Forced Internal Forced Internal Forced Internal Forced Convection Convection Convection ConvectionJackson TeohNo ratings yet
- Heat Transfer in External Forced ConvectionDocument32 pagesHeat Transfer in External Forced ConvectionJackson TeohNo ratings yet
- Tutorial 2Document3 pagesTutorial 2Jackson TeohNo ratings yet
- 3.1 External Forced Convection PDFDocument32 pages3.1 External Forced Convection PDFJackson TeohNo ratings yet
- Chapter 4Document92 pagesChapter 4utsav_koshtiNo ratings yet
- Welding Fixture With Active Position Adapting FunctionsDocument64 pagesWelding Fixture With Active Position Adapting FunctionsParthipan KirubakaranNo ratings yet
- Ehm 3066 Engineer and Soceity TRIMESTER 3 2017/2018 Chapter 2 TutorialDocument1 pageEhm 3066 Engineer and Soceity TRIMESTER 3 2017/2018 Chapter 2 TutorialJackson TeohNo ratings yet
- MTS MOM 1730 TutorialDocument3 pagesMTS MOM 1730 TutorialJackson TeohNo ratings yet
- Johnson RuleDocument2 pagesJohnson RuleKaran MadaanNo ratings yet
- InventoryDocument73 pagesInventoryJackson TeohNo ratings yet
- Lean SystemDocument33 pagesLean SystemJackson TeohNo ratings yet
- Tutorial 12 Scheduling 2017-18Document4 pagesTutorial 12 Scheduling 2017-18Jackson TeohNo ratings yet
- Scheduling Lecture NoteDocument53 pagesScheduling Lecture NoteJackson TeohNo ratings yet
- Mmls Note FSDocument22 pagesMmls Note FSJackson TeohNo ratings yet
- EME1076 - Labsheet 2016 - 17Document10 pagesEME1076 - Labsheet 2016 - 17Jackson TeohNo ratings yet
- EME 1066 Strength of Materials 2015/2016/02: Tutorial Solution 4Document13 pagesEME 1066 Strength of Materials 2015/2016/02: Tutorial Solution 4Jackson TeohNo ratings yet
- Availability Analysis: Tutorial QuestionsDocument2 pagesAvailability Analysis: Tutorial QuestionsJackson TeohNo ratings yet
- Chapter 5: Method in Control - Root Locus MethodDocument41 pagesChapter 5: Method in Control - Root Locus MethodJackson TeohNo ratings yet
- Kinetics of Particles Tutorial 2 ProblemsDocument4 pagesKinetics of Particles Tutorial 2 ProblemsJackson TeohNo ratings yet
- EME 1066 Strength of Materials 2016/2017/02: Tutorial Solution 1Document7 pagesEME 1066 Strength of Materials 2016/2017/02: Tutorial Solution 1Jackson TeohNo ratings yet
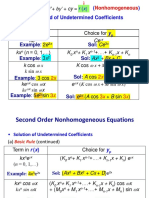
- Ay"+ By' + Cy : (A) Basic Rule Term in Choice For 2eDocument4 pagesAy"+ By' + Cy : (A) Basic Rule Term in Choice For 2eJackson TeohNo ratings yet
- Statistics Notes-1Document22 pagesStatistics Notes-1Jackson TeohNo ratings yet
- Public Service Commission, West Bengal: Notice Inviting Expression of Interest For Enlistment As LawyersDocument3 pagesPublic Service Commission, West Bengal: Notice Inviting Expression of Interest For Enlistment As LawyersITI JobNo ratings yet
- Calculus Problems Solutions BlogDocument5 pagesCalculus Problems Solutions BlogheeraNo ratings yet
- Chapter 8Document3 pagesChapter 8Michelle MartinNo ratings yet
- Pon Vidyashram Group of Cbse Schools STD 8 SCIENCE NOTES (2020-2021)Document3 pagesPon Vidyashram Group of Cbse Schools STD 8 SCIENCE NOTES (2020-2021)Bharath Kumar 041No ratings yet
- What Is A Modal Verb - List of Modal Verbs - GingerDocument9 pagesWhat Is A Modal Verb - List of Modal Verbs - GingerPatricia ShantiNo ratings yet
- Okhistorych 9 NotesDocument18 pagesOkhistorych 9 Notesapi-337913436No ratings yet
- Level of Awareness on Anti-Violence LawDocument16 pagesLevel of Awareness on Anti-Violence LawWilliam VincentNo ratings yet
- The Knowledge Integration Strategy Analysis After Geely Acquisition of VolvoDocument4 pagesThe Knowledge Integration Strategy Analysis After Geely Acquisition of VolvoVivi Sabrina BaswedanNo ratings yet
- FNHA First Nations Health Benefits Mental Health Provider ListDocument17 pagesFNHA First Nations Health Benefits Mental Health Provider ListJoel PanganibanNo ratings yet
- Pityriasis Versicolor: Avoiding Pitfalls in Disease Diagnosis and TherapyDocument3 pagesPityriasis Versicolor: Avoiding Pitfalls in Disease Diagnosis and TherapypanduNo ratings yet
- Status Signalling and Conspicuous Consumption: The Demand For Counterfeit Status GoodDocument5 pagesStatus Signalling and Conspicuous Consumption: The Demand For Counterfeit Status GoodMarliezel CaballeroNo ratings yet
- Mercyhurst Magazine - Winter 1989-90Document36 pagesMercyhurst Magazine - Winter 1989-90hurstalumniNo ratings yet
- Brown Creative Vintage Rustic Motivational Quote PosterDocument1 pageBrown Creative Vintage Rustic Motivational Quote PosterRafunzel Pe BandoquilloNo ratings yet
- APES Tragedy of The Commons Lab Activity: Purpose: ObjectiveDocument4 pagesAPES Tragedy of The Commons Lab Activity: Purpose: ObjectivejakeingerNo ratings yet
- Kinematics of MachineDocument4 pagesKinematics of MachineSumit KambleNo ratings yet
- Canon Sus 2016 e 03Document2 pagesCanon Sus 2016 e 03Roxanne Tacy SantiagoNo ratings yet
- Manual Sensor Anemómetro WindSonic GPADocument30 pagesManual Sensor Anemómetro WindSonic GPApevalpevalNo ratings yet
- Difference Between Society and CommunityDocument2 pagesDifference Between Society and CommunityashnajananNo ratings yet
- Isc at The Receiving End of A Feeder As A Function of The Isc at Its Sending End - Electrical Installation GuideDocument3 pagesIsc at The Receiving End of A Feeder As A Function of The Isc at Its Sending End - Electrical Installation GuidedhruvNo ratings yet
- Indesign: A How-To Guide For Creating A Professional Resumé Using IndesignDocument14 pagesIndesign: A How-To Guide For Creating A Professional Resumé Using IndesignmadpancakesNo ratings yet
- MA Urdu Revised Syllabus 2022-23Document35 pagesMA Urdu Revised Syllabus 2022-23Mazhar KhanNo ratings yet
- Teoldo - 2011 - System of Tactical Assessment in Soccer (FUT-SAT)Document16 pagesTeoldo - 2011 - System of Tactical Assessment in Soccer (FUT-SAT)Stefano AlferoNo ratings yet